Understanding Industrial Robot Structures, Drives, and Technical Indicators

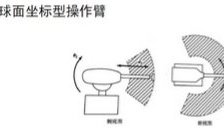
1. Common Kinematic Configurations1. Cartesian ManipulatorAdvantages: Easily controlled by computers, achieving high precision. Disadvantages: Obstructs work, occupies a large area, has low speed, and poor sealing.① A series of tasks such as welding, handling, loading and unloading, packaging, palletizing, de-palletizing, inspection, flaw detection, classification, assembly, labeling, coding, (soft imitation) spraying, target tracking, bomb disposal, etc.② … Read more