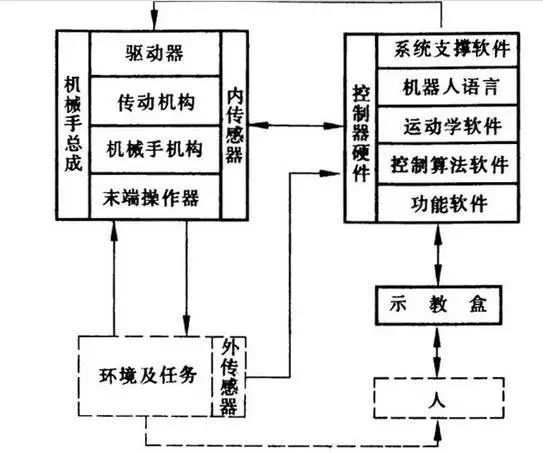
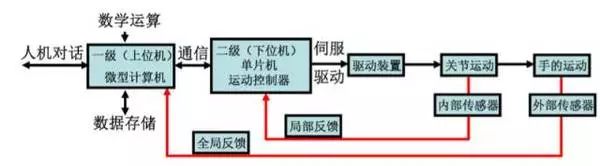
This article provides a detailed description of the structure, drive, and technical specifications of industrial robots, making it worth a closer look!


☞ Source: Robot Network ☞ Editor: You Xiaoxiu☞ Reviewer: Wang Ying
☞ Advertising Cooperation: Sun Ha 13811718902
Statement: If there are copyright issues with the videos, images, or text used in this article, please inform us immediately, and we will verify the copyright based on the proof materials you provide and pay remuneration according to national standards or delete the content immediately!
Statement: If there are copyright issues with the videos, images, or text used in this article, please inform us immediately, and we will verify the copyright based on the proof materials you provide and pay remuneration according to national standards or delete the content immediately!