This article is from the Jishu community, and it mainly shares how to use the XR806 to achieve the kinematic inverse solution of a single leg of a parallel quadruped robot and overall gait planning.
1 Project Introduction
Using the RX806 serial protocol to communicate with the DJI A board’s STM32, we achieve the kinematic inverse solution of a single leg of a parallel quadruped robot and overall gait planning.

Figure 1 Physical Image
2 Related Algorithms
2.1 Single Leg Kinematic Inverse Solution
Control 2 brushless motors (each represented by a red arrow) to form a single leg in parallel, calculating the foot trajectory through angle closed-loop control, and creating a cycloidal trajectory at the foot end (the green part in the image below) to simulate the motion of animals like cats and dogs.
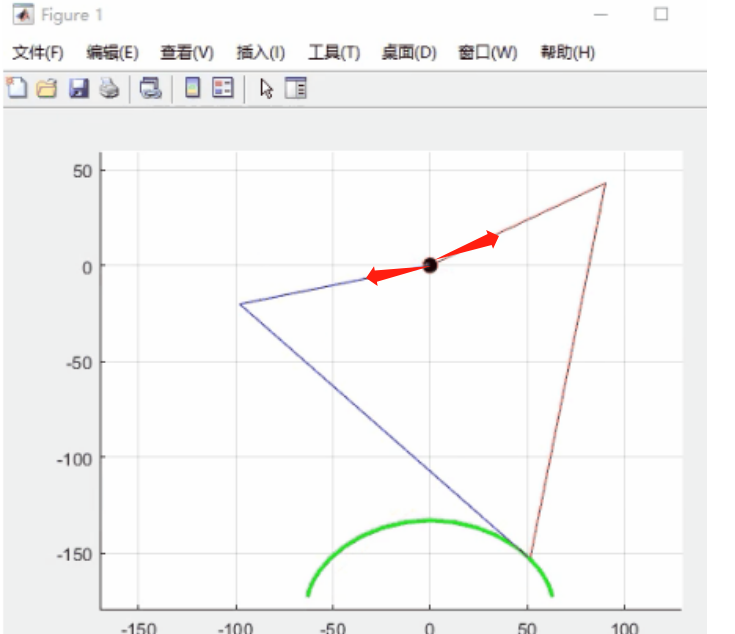
Figure 2
% Cycloid Equation (matlab) sigma=2*pi*t/(Ts);xep=(xf-xs)*((sigma-sin(sigma))/(2*pi))+xs;zep=h*(1-cos(sigma))/2+zs;x=[x,xep];z=[z,zep];2.2 Gait Planning (Currently Mainly Using Walk Gait)
The Walk gait is a static gait, meaning that during movement, three legs are always in a support phase, with at most one leg in a swing phase. The most common rotation order of the four legs in the Walk gait for quadrupedal animals is 1→3→4→2→1.
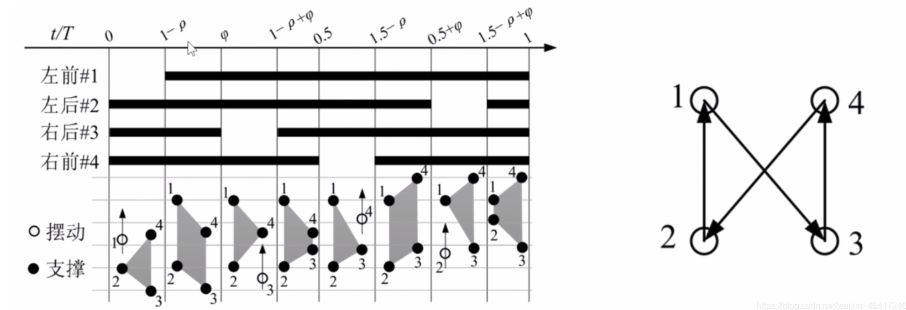
Figure 3
2.3 Brushless Motor Angular Velocity PID Closed Loop
Using P proportional, I integral, and D differential through incremental PID to enable the brushless motor to stably control speed and angle, the pd control function is as follows:
int Balance(float Angle,float Gyro,int Middle,float Balance_Kp,float Balance_Kd){ float Angle_bias,Gyro_bias; int balance; Angle_bias=Middle-Angle; Gyro_bias=0-Gyro; balance=Balance_Kp*Angle_bias+Gyro_bias*Balance_Kd; return balance;}3 Code Implementation
XR806:
Initializing serial port configuration:
static int uart_init(void){ UART_InitParam param;
param.baudRate = 115200; param.dataBits = UART_DATA_BITS_8; param.stopBits = UART_STOP_BITS_1; param.parity = UART_PARITY_NONE; param.isAutoHwFlowCtrl = 0;
if(HAL_UART_Init(UARTID, ¶m) != HAL_OK) return -1; /* Enable DMA */ if (HAL_UART_EnableTxDMA(UARTID) != HAL_OK) return -2; if (HAL_UART_EnableRxDMA(UARTID) != HAL_OK) return -3;
return 0;}
In the main function, the while loop sends the corresponding data using the following function.
HAL_UART_Transmit_DMA(UARTID, (uint8_t *)buffer,sizeof(buffer));In STM32, the serial port 3 receive callback executes the corresponding forward and backward commands.
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart->Instance == USART3) { HAL_UART_Receive_IT(&huart3,&RxBuffer_control,1);
switch(RxBuffer_control) { case 'W': Motor_Control( 1, 1, 1, 1); break; case 'S': Motor_Control(-1, -1, -1, -1); break; case 'A': Motor_Control(-1, -1, 1, 1); break; case 'D': Motor_Control( 1, 1, -1, -1); break; case 'P': Motor_Control( 0, 0, 0, 0); break; }}4 Physical Display
4.1 Stationary
4.2 Omnidirectional Movement
Copyright belongs to the original author. If there is any infringement, please contact for deletion.
END
关于安芯教育
安芯教育是聚焦AIoT(人工智能+物联网)的创新教育平台,提供从中小学到高等院校的贯通式AIoT教育解决方案。
安芯教育依托Arm技术,开发了ASC(Arm智能互联)课程及人才培养体系。已广泛应用于高等院校产学研合作及中小学STEM教育,致力于为学校和企业培养适应时代需求的智能互联领域人才。