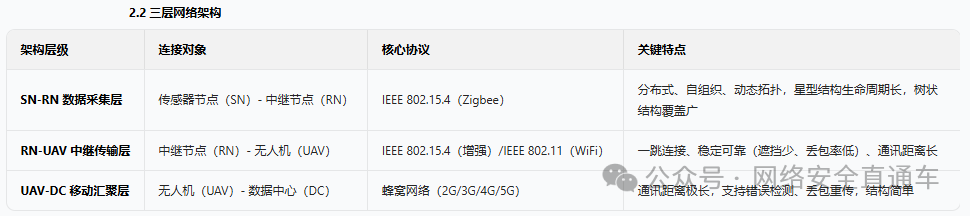
Based on Unmanned Aerial Vehicles (UAV) and Wireless Sensor Networks (WSN),the three-tier architecture TUFSN (three-tier unmanned aerial vehicle farmland sensor network) consists of the SN-RN data collection layer, RN-UAV relay transmission layer, and UAV-DC mobile aggregation layer. Through Matlab simulation, it was found that the cache size range of the relay node (RN) is 3~13 kB, and the speed has a greater impact on RN cache than height; the UAV carrying mobile nodes flies at a speed of 1 m/s and at a height of 15 m, with an average communication duration of 26 s with 8 ground RNs, ultimately verifying that the system can meet the needs of southern farmland information collection for “long lifecycle, reliable data transmission, and wide coverage”.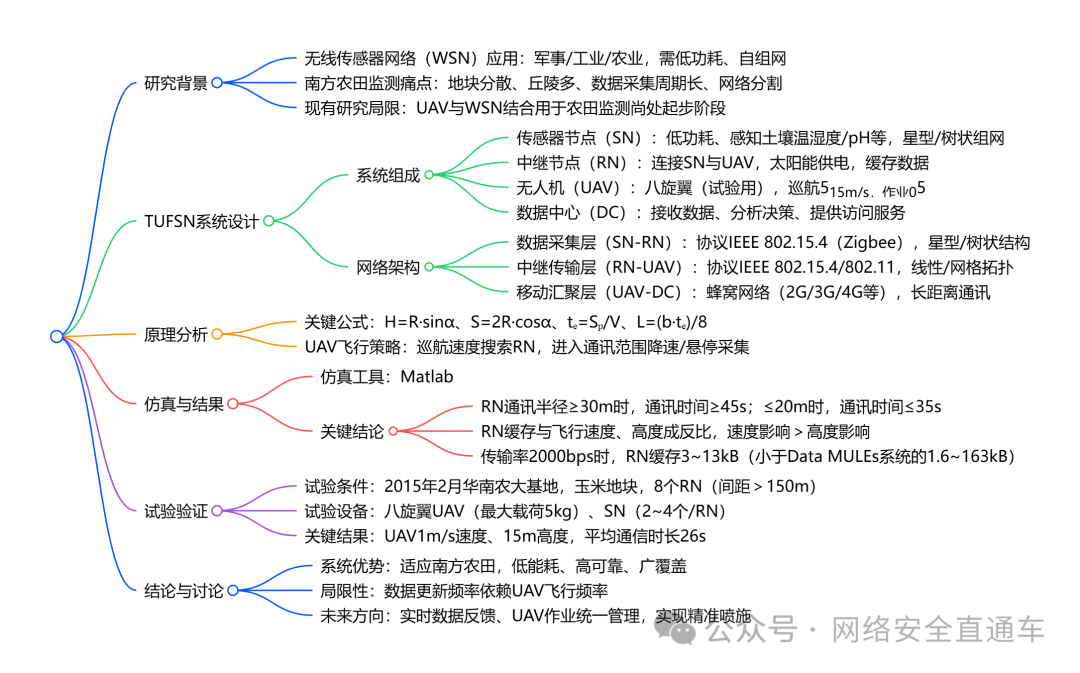
1. Research Background and Significance
- Technical Background: Wireless Sensor Networks (WSN) are a combination of embedded, networking, and sensor technologies, widely used in military, industrial, and agricultural fields. However, farmland WSN nodes are limited by battery power, which results in low power consumption and processing capability, and the characteristics of southern farmland, such as “fragmented plots, hilly terrain, and harsh environments,” further increase the difficulty of information collection.
- Current Research Status: There has been research abroad on mobile nodes (such as Data MULEs) and the combination of UAVs with WSNs, but the integration of UAVs and WSNs for farmland information monitoring in China is still in the initial stage, requiring targeted architectural design.
- Research Objectives: To propose a WSN architecture suitable for southern farmland to address the monitoring needs of “reliable data transmission, wide coverage, and long lifecycle.”

3. Core Principles and Formulas
- Geometric Relationship Formula:
- Flight height and communication radius:\(H = R \cdot \sin\alpha\) (where H is the UAV height, R is the RN communication radius, and \(\alpha\) is the angle between the connection line and the horizontal plane)
- Flight distance within UAV communication range:\(S = 2R \cdot \cos\alpha\)
- Data exchange time:\(t_e = \frac{S_p}{V}\) (where S_p is the flight distance for data exchange, and V is the UAV speed)
- Data transmission volume:\(L = \frac{b \cdot t_e}{8}\) (where b is the transmission rate, and L is the number of data bytes, RN cache must be ≥L)
4. Simulation Analysis (Matlab Tool)
- Key Simulation Parameters: Transmission rate \(b = 2000 \text{ bps}\), UAV speed \(1 \text{ m/s}\) (base value)
- Core Conclusions:
- RN communication radius: When ≥30 m, communication time ≥45 s; when ≤20 m, communication time ≤35 s, flight height must be reduced to ensure communication time.
- Factors affecting RN cache: Inversely proportional to both flight speed and height, and the impact of speed on cache is greater than that of height.
- Cache size range: At a transmission rate of 2000bps, RN cache is 3~13 kB (far smaller than the 1.6~163 kB of Data MULEs systems).
5. Experimental Verification
5.1 Experimental Conditions
- Experimental Subject: Corn Field
- Device Deployment: 8 RNs (spacing >150 m), with 2~4 SNs around each RN (communicating only with the nearest RN)
- UAV Parameters: Octocopter, speed 1 m/s, height 15 m, carrying Zigbee/3G/data processing module

- Key Result: The average communication duration between the UAV and RN is 26 s, meeting the requirements for reliable data transmission.
6. Conclusion and Outlook
- System Advantages: Adapted to the characteristics of southern farmland, “fragmented plots and hilly terrain,” with low energy consumption (small RN cache), wide coverage, and reliable transmission.
- Limitations: Data update frequency depends on UAV flight frequency, requiring synchronization with UAV spraying operations to reduce costs.
- Future Directions: Achieve real-time feedback of environmental data and pesticide drift data, unify management of UAV flight parameters and operational effects, and achieve the goals of precision spraying and safe, efficient agricultural aviation.