Journal of Unmanned Undersea Systems
Volume 33, Issue 5, 2025

Underwater Soft Robots
Recent Advances in Underwater Flexible Sensors
Authors

Wang Tingyu1,2, Shi Keyong3, Wu Mengwei4, Tang Wei1,2,*
Affiliations

1. School of Nano Science and Technology, University of Chinese Academy of Sciences2. Beijing Institute of Nanoenergy and Nanosystems, Chinese Academy of Sciences3. School of Mechanical Engineering, Tianjin University of Commerce4. Dalian Maritime University, College of Marine Engineering, Key Laboratory of Marine Micro-Nano Energy and Self-Driven Systems, Dalian
Citation Format

Wang T Y, Shi K U, Wu M W, et al. Recent advances in underwater flexible sensors[J]. Journal of Unmanned Undersea Systems, 2025, 33(5): 758-768.
WANG T Y, SHI K U, WU M W, et al. Recent advances in underwater flexible sensors[J]. Journal of Unmanned Undersea Systems, 2025, 33(5): 758-768.
 Read the original article
Read the original article
Abstract
With the increasing demand for marine development, underwater flexible sensors, due to their excellent compliance and environmental adaptability, show great potential in underwater applications. Especially in complex environments with high hydrostatic pressure, large strain, and corrosion resistance, the integrated application of underwater flexible sensors is significant for enhancing the perception capabilities of underwater soft robots, diving equipment, marine detection devices, and other marine engineering systems. This article reviews the latest application progress of resistive, capacitive, piezoelectric, triboelectric, optical fiber, and electromagnetic sensing mechanisms in underwater environments. By comparing the advantages and challenges of different sensing mechanisms, it systematically summarizes their application status in underwater manned systems and soft robots, focusing on innovative applications in deformation, posture, tactile, and flow field perception. Furthermore, it is proposed that breakthroughs in the adaptability and long-term reliability of underwater flexible sensors are needed, focusing on two major application scenarios: body perception and environmental perception, with an emphasis on multimodal fusion, intelligent decoupling, and bionic integration technologies. These research results provide new ideas and feasible solutions for the future development direction of underwater flexible sensors.
Introduction
The demand for marine development and exploration in resource exploration, facility maintenance, environmental monitoring, and national defense security has surged, driving rapid advancements in underwater robotics technology. Traditional rigid underwater robots are limited in adaptability in complex unstructured seabed environments due to high inertia, low compliance, and vulnerability to collisions, posing risks of damaging themselves and fragile ecosystems. Inspired by biological soft robotics technology, with its inherent compliance, continuous deformation capabilities, and excellent fluid dynamics characteristics, provides new avenues to overcome these limitations. Its core advantages include safe interaction, bionic propulsion, operation in confined spaces, and collision energy dissipation, making it suitable for tasks such as fine sampling, biological observation, and complex structure inspection.
However, the key bottleneck in realizing the functionality of soft robots lies in their perception capabilities. Their continuous, global deformation characteristics require real-time and accurate perception of the body state (deformation, cavity pressure, posture) and external environment (contact force, flow field, chemical signals) to support intelligent navigation, dexterous manipulation, and autonomous decision-making, which gives rise to stringent composite requirements for sensors: they must possess high flexibility/large strain compatibility (strain > 50%, local > 100%), deep-sea high-pressure tolerance (pressure > 10 MPa), long-term seawater corrosion/biological fouling stability, as well as sensitivity to multiple physical/chemical fields and rapid dynamic response capabilities. Traditional rigid sensors, due to mechanical mismatch, complex packaging, and insufficient environmental tolerance, struggle to meet these demands.
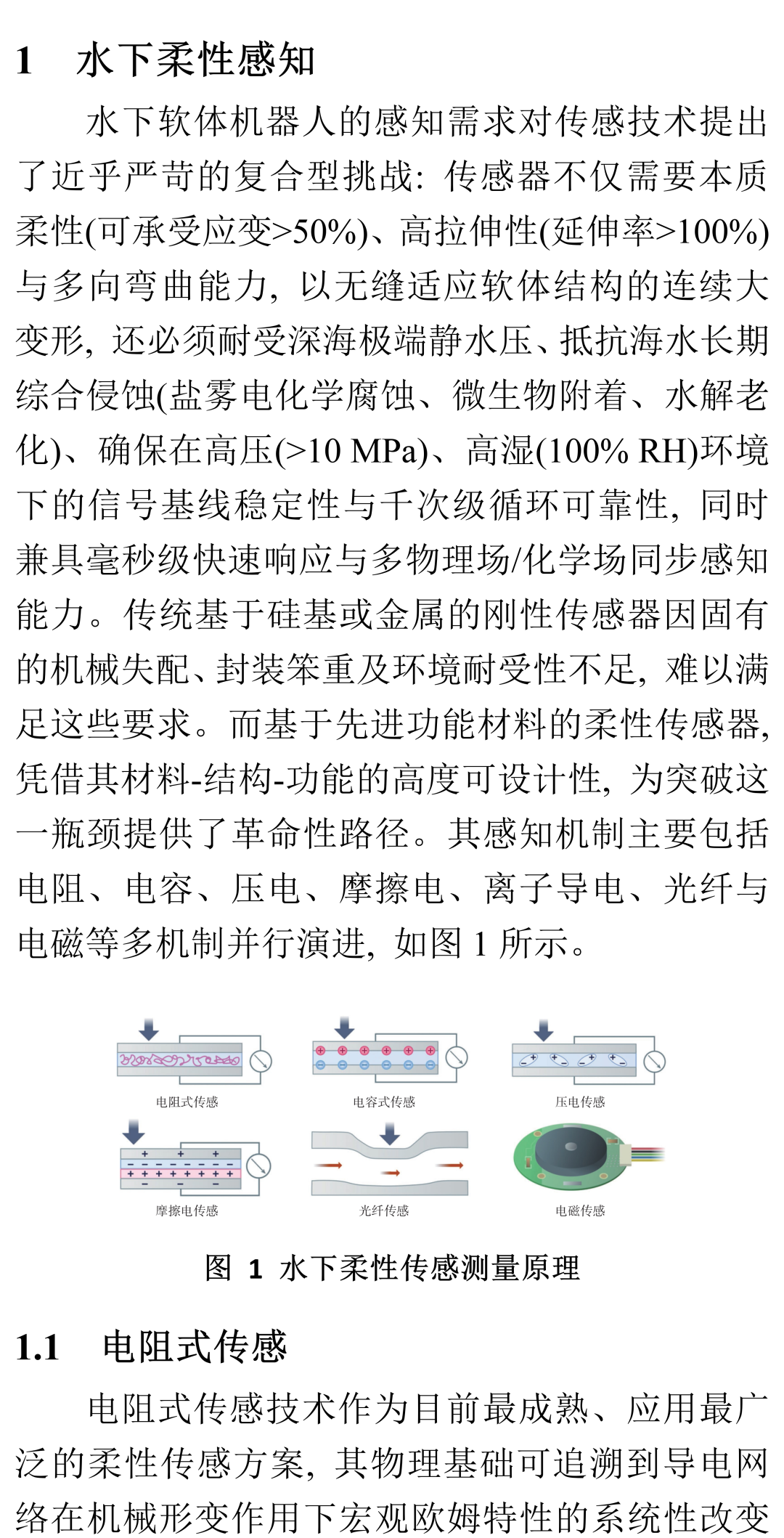
Flexible sensors are not merely “replacements” for rigid devices; their inherent deformability, matrix compatibility, and functional designability enable soft systems to achieve integrated bionic integration of “structure-sensing,” allowing them to conformally attach or embed within the actuator body, forming a skin-like electronic interface that converts deformation, pressure, contact, and even chemical stimuli into high-fidelity electrical/optical signals in real-time, providing the rich body and environmental information required by robots. Currently, resistive, capacitive, piezoelectric, triboelectric, ionic conductive, optical fiber, and electromagnetic mechanisms are evolving in parallel, with material systems extending from conductive polymers and carbon nanotubes to liquid metals and multi-network hydrogels, and device forms transitioning from single-point sensing to high-density arrays and distributed networks. However, extreme deep-sea environments (hydrostatic pressure > 10 MPa, high salt spray corrosion, microbial fouling), multi-field coupling interference, long-term reliability gaps, and high-density heterogeneous integration challenges remain bottlenecks that hinder their transition from the laboratory to deep-sea applications.
In light of this, this article systematically reviews the research progress of underwater soft robot flexible sensors: elucidating the underwater adaptability and optimization strategies of core sensing mechanisms; focusing on body perception (deformation, cavity pressure, posture) and environmental perception (tactile, gripping force, flow field, chemical) as two major application scenarios; ultimately discussing the future development directions of underwater soft robots in sensing principles and external force perception, analyzing key challenges surrounding multimodal fusion, high coupling, and deep integration of intelligent perception algorithms, providing references for interdisciplinary research, and promoting the leap in perception capabilities of underwater soft robots and the practical application process in deep-sea environments.
Conclusion
With the rapid development of flexible electronics technology and materials science, underwater soft robots, due to their excellent environmental adaptability and bionic performance, are gradually becoming important platforms for executing complex marine tasks. The sensing system and external force perception capabilities are fundamental to achieving autonomous environmental perception and intelligent decision-making. Although certain progress has been made in this field, challenges such as limited sensing accuracy, insufficient real-time feedback capabilities, and low signal-to-noise ratios in complex underwater environments remain. Looking to the future, the development trends of underwater soft robots in sensing principles and external force perception mainly include the following directions: First, multimodal flexible sensing fusion technology aims to address the coexistence of various physical quantities (such as pressure, flow rate, temperature, and contact force) in marine environments, requiring further advancement in the integration research of flexible multimodal sensors. Through material hierarchical design and microstructure regulation, achieving simultaneous capture of multiple physical parameters by a single sensing unit, and enhancing the robustness of the perception system through signal fusion and redundancy strategies. Secondly, the perception mechanism based on body coupling utilizes the inherent compliance and deformation response of soft robot bodies, modeling the structural strain distribution to construct a perception method deeply integrated with the body. By reverse engineering and analyzing the deformation patterns of soft structures, achieving high-precision identification of external force magnitude, direction, and distribution, thus providing robots with more essential force perception capabilities. Finally, in response to the challenges of perception signals being easily disturbed in complex marine environments, it is necessary to develop signal denoising and feature extraction methods based on deep learning and graph neural networks, and introduce transfer learning mechanisms, enabling robots to adapt existing perception experiences to new environments, thereby enhancing their perception stability and adaptability in dynamically changing environments.
In summary, future research on sensing and body perception of underwater soft robots will focus on multimodal fusion, structural coupling perception, and deep integration of intelligent algorithms, providing key technical support for achieving higher levels of autonomy and intelligence in applications such as deep-sea exploration and environmental monitoring.
1
END
1
References omitted
This article has been edited; the original was published in the Journal of Unmanned Undersea Systems, Volume 33, Issue 5, 2025. Click to read the original article.