
Applications of Real-Time Simulators Based on EtherCAT Bus
(Robot Control, IO Channel Expansion)

Background
EtherCAT (Ethernet for Control Automation Technology) is an industrial Ethernet protocol developed by Beckhoff in Germany, characterized by high-speed real-time performance, high-precision synchronization, and flexible topology.
01
Robot Control Based on EtherCAT Bus
EtherCAT has become one of the core communication solutions for industrial robots, especially in multi-axis collaborative and high-precision control scenarios. Its essence lies in optimizing Ethernet data transmission mechanisms to achieve “zero-latency” data interaction between robot controllers, drives, and sensors, meeting complex requirements for robotic motion control, force control, and visual guidance.
EtherCAT robots typically adopt a “master-slave centralized control + slave distributed execution” architecture:
-
Master: Responsible for robot motion planning (e.g., Cartesian space trajectory generation), logical decision-making (e.g., collision detection), and coordination with external devices (e.g., vision systems), generally handled by an industrial PC or dedicated robot controller.
-
Slaves: Include joint drives (executing the master’s speed/torque commands), sensors (e.g., force control sensors, encoders, vision cameras, providing real-time feedback on position, force, and image data). Slaves do not require complex calculations, only needing to respond quickly to master commands, reducing system complexity.
Real-time simulators can develop corresponding models based on customer needs using Matlab/Simulink, deployed in real-time machines to function as either masters or slaves.
The characteristics of EtherCAT allow it to cover all scenarios from traditional industrial robots to emerging humanoid and collaborative robots, especially excelling under the demands for “high precision, multi-axis collaboration, and real-time feedback”.
Industrial Robotic Arms: High-Precision Assembly and Processing
Yaskawa GP series robots: EtherCAT directly connects vision cameras and drives, reducing image transmission latency from the traditional bus of 5ms to 0.8ms, achieving seamless integration of “visual guidance – grasping – placing”, improving sorting efficiency by 30%.

Humanoid Robots: High-Dynamic Multi-Joint Collaboration
Boston Dynamics Atlas: Controls 28 hydraulic joints using EtherCAT, with joint response latency < 100μs and closed-loop control frequency of 1kHz; simultaneously, sensor data from LiDAR and IMU (Inertial Measurement Unit) is also transmitted via EtherCAT, ensuring synchronization of motion balance and environmental perception.

Collaborative Robots: Safety and Real-Time Interaction
KUKA LBR iisy series: Connects 6D force sensors and joint drives via EtherCAT, with collision detection response time < 0.5ms, meeting ISO/TS 15066 collaborative safety standards; simultaneously, the daisy chain topology simplifies wiring, reducing the robot’s body weight by 15%, facilitating mobile deployment.

AGVs and Mobile Robots: Multi-Device Collaboration
Reisai Intelligent R2 series AGVs: Use EtherCAT remote IO modules to connect laser navigation sensors and motor drivers, with a communication cycle of 1ms, AGV positioning accuracy of ±5mm, capable of real-time collaboration with sorting robots in the workshop, achieving “goods-to-person” automation.

02
Expansion IO Controlled by EtherCAT Bus
The EtherCAT bus is widely used for expansion IO (Input/Output) modules in real-time control systems.
-
Ultra-low latency: Typical communication cycle < 1ms, suitable for high-speed control scenarios.
-
High synchronization accuracy: Supports distributed clocks (DC), with synchronization accuracy between devices reaching < 100ns.
-
Flexible topology: Supports linear, star, tree, or hybrid topologies without the need for additional switches.
-
Hot-swappable support: Allows adding or removing slave devices while running.
The EtherCAT bus supports products from brands such as Beckhoff, Guocheng, Siemens, Omron, and WAGO. It supports digital input/output, analog input/output, thermocouple, and other signal types.

The resistive simulation channel expanded based on the EtherCAT bus is a high-performance solution in the field of industrial automation, used to achieve distributed, high-precision resistive simulation functions. Below is a solution developed by Luyue Real-time, with the following hardware specifications for a single resistive board:
1) Number of channels: 4;
2) Voltage range: ±40VDC;
3) Resistance range: 1~16MΩ;
4) Resistance step: 1Ω;
5) Resistance accuracy: ≤0.1%;
6) Resistance update rate: ≤100Hz;
7) Supports open-circuit and short-circuit fault injection.
If multi-channel resistive simulation is needed, a chassis installation solution can be used, as shown below, where each chassis can install up to 14 resistive boards, allowing for 14*4=56 channels of resistive simulation.

03
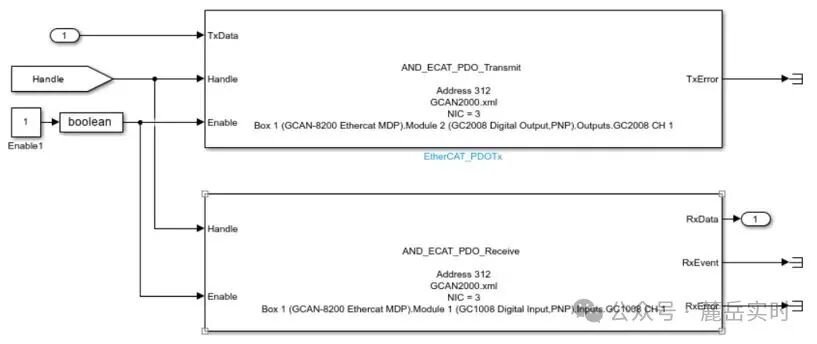
EtherCAT Bus Control Model of Real-Time Simulator

Using AND real-time simulators to control the IO modules of the EtherCAT bus, IO signal management and control can be easily achieved by importing XML files.

[END]

Contact number: 17802104006 (same number for WeChat)