
The intelligent chassis is a key innovation point in the trend of electrification and intelligence in automobiles. It involves the integration of the three electric systems, the simplification of mechanical components, and the enhancement of electronic control capabilities. With the popularity of advanced driver-assistance systems (such as ACC and AEB) and the development of autonomous driving technology, the intelligent chassis needs to adapt to an increasing number of usage scenarios while providing higher levels of safety and comfort.
▼
In traditional automotive design, the chassis system is divided into four independent subsystems: drive, brake, steering, and suspension. This design leads to information silos, inconsistent design goals, a large calibration workload, and control instability issues. Each subsystem pursues different optimization objectives, lacking effective information sharing and coordination, making overall vehicle performance optimization and calibration complex. To address these issues, advanced control strategies such as Integrated Chassis Control (ICC) and Vehicle Domain Control (VDC) have been introduced. By achieving information sharing and coordination among subsystems, unified optimization objectives can be established, significantly enhancing overall vehicle performance, reducing calibration workload, and lowering the risk of control instability, thus promoting the development of automotive technology towards intelligence and efficiency.
Therefore, currently in chassis domain control, the industry is focusing on the motion integration control of the chassis system. For example, combining drive torque vector control with drive/brake control, reasonable distribution of torque can fully exploit the vehicle’s acceleration potential, maximize cornering limits, and optimize dynamic response.
Faced with such challenges, two challenges are posed to vehicle chassis development tools.One is virtual simulation capability, and the other is support for architectural design workflows.
▼
| Support for Architectural Design Workflows:
To manage and optimize the complex interactions within the chassis system, a multidisciplinary collaborative architectural design workflow is required. This involves the entire process from concept design to final verification, including requirement gathering, system modeling, performance evaluation, design optimization, prototype development, and testing verification across multiple stages. An effective workflow ensures that experts from different engineering fields (such as mechanical, electronic, and software) can work closely together to address interdisciplinary challenges in design.
| Virtual Simulation Capability:
Advanced virtual simulation capabilities are key to addressing complex vehicle dynamics interactions. This requires development tools to accurately simulate and analyze vehicle behavior under various environments and conditions, including but not limited to the response of the suspension system, the efficiency of the braking system, and the performance of the power transmission system. Effective simulation tools can help engineers understand the interactions between systems, predict potential design issues, and make necessary adjustments before actual manufacturing.
To meet these challenges, development tools need to possess high flexibility and scalability while providing powerful data analysis and processing capabilities to support complex system-level design and decision-making processes. Additionally, these tools should be able to integrate the latest technological advancements, such as artificial intelligence and machine learning, to further enhance design efficiency and innovation.
▼
Support for Architectural Design Workflows
In the development of chassis domain controllers (Domain Controller), numerous challenges arise due to the need to integrate and coordinate various complex functions. The chassis domain controller is an integrated control unit responsible for managing multiple chassis systems of the vehicle, such as the powertrain, braking system, suspension system, and vehicle stability control.
For the chassis system, how to translate customer voices into overall vehicle architecture requirements and then decompose them into chassis functions, such as braking system characteristics and performance requirements, is of great significance for reducing development iterations.
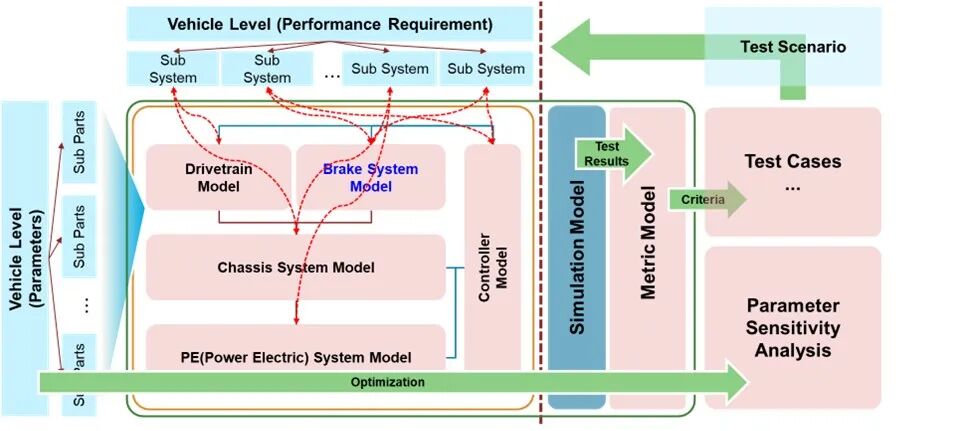
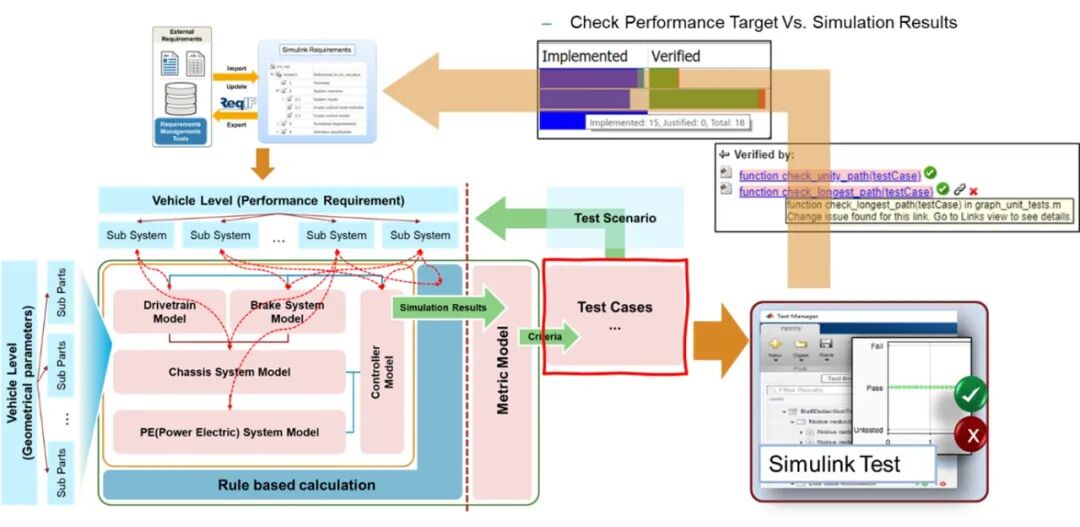
The decomposition and verification process of chassis functions from the perspective of overall vehicle architecture first assigns vehicle-level indicators to the system and constructs simulation models, defining design parameters and executing tests to verify whether the requirements are met. If not, further parameter sensitivity analysis and optimization are conducted. Here, we actually use the model as a virtual prototype to verify whether the chassis functions meet the overall vehicle indicators in advance.
| Architectural Design Generally Includes:
Requirement Structuring:The development process begins with a detailed analysis and structuring of project requirements to ensure that all requirements are clearly defined and traceable.
Functional Architecture Extraction:Based on structured requirements, the development team extracts the functional architecture of the system. The functional architecture defines the functions that the system should have and how these functions interact, transforming requirements into specific functional descriptions.
Logical Architecture Construction:Building on the functional architecture, the logical architecture is further developed. The logical architecture focuses on how functions are logically distributed across different parts of the system, including logical connections and data flows between functional units.
Physical Architecture Construction:Finally, the physical architecture concretizes the abstract concepts of the logical architecture, defining the hardware and software components required to implement these logical units.
Based on architectural design, the development team can populate these architectures by selecting and defining specific components and algorithm models, thereby realizing the concretization of behavior. This provides a foundation for requirement verification based on simulation, allowing the team to validate whether the system design meets established requirements through a simulation environment before actual construction and testing.
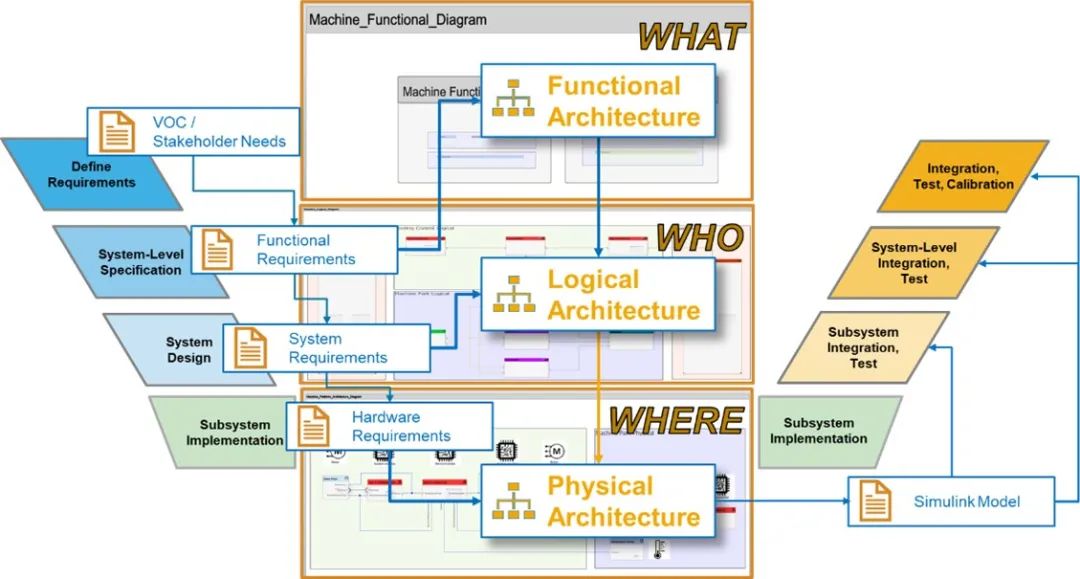
MATLAB System Composer is an efficient system and software architecture design tool that allows engineers to quickly build architectural models of complex systems and demonstrate their components, interfaces, and interactions. It supports direct linking of architectural models to system requirements and ensures that designs meet established requirements through integrated requirement management tools. Additionally, System Composer can seamlessly integrate with Simulink, simplifying the detailed design and behavioral modeling of controllers, allowing for the definition and simulation of control logic at the component level. This integration also supports system-level simulation, helping engineers validate system architecture and control strategies early in the design process, identify and resolve potential issues, accelerate the development process, and improve system quality.
▼
Virtual Simulation Capability
Intelligence has driven the development of chassis domain control systems, and the resulting increase in system complexity requires more efficient development and simulation verification methods.
To address the challenges brought by intelligence, the requirements for simulation tools extend beyond merely building controlled object models; they also need to integrate simulation platforms and provide unified simulation solutions. MATLAB offers solutions for virtual vehicles, including vehicle modeling, control software design, rapid simulation scene setup, and deployment of optimization models.

| Building Vehicle Dynamics Models
It provides the Vehicle Dynamics Blockset, which includes predefined vehicle models and controllers, as well as a module library that can be used to quickly build and simulate vehicle dynamics.
At the same time, the Virtual Vehicle App can be used to quickly build vehicle models that meet application complexity.
, duration02:20
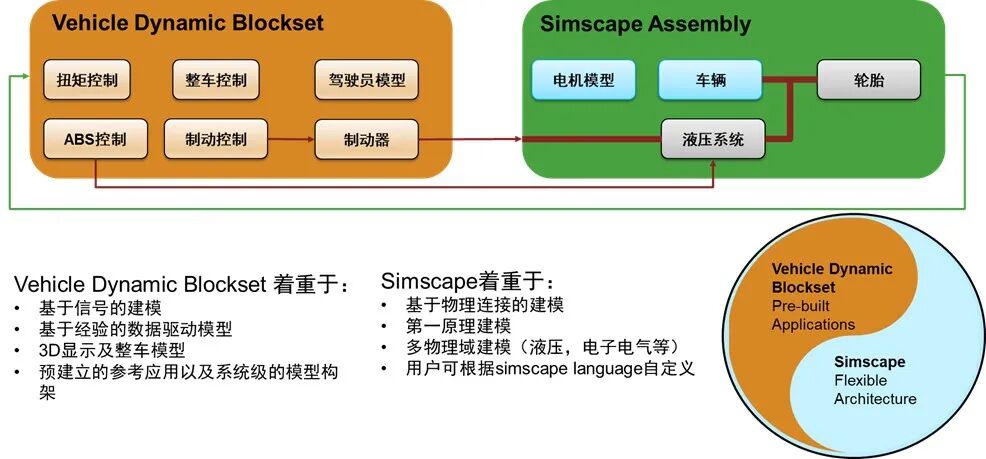
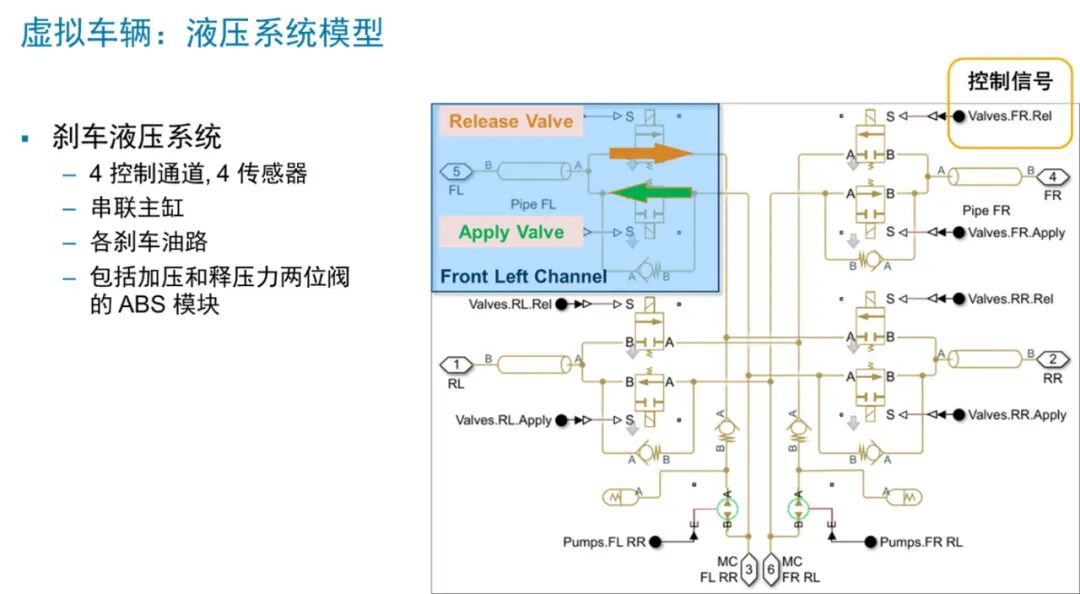
Although the Vehicle Dynamics Blockset provides a method for quickly building vehicle models, facilitating vehicle dynamic analysis and control system design, it may not meet the detailed modeling requirements for certain vehicle details, such as braking hydraulic systems, steering electromechanical systems, and suspension multibody systems. Therefore, the Simscape physical modeling tool becomes an important supplement.
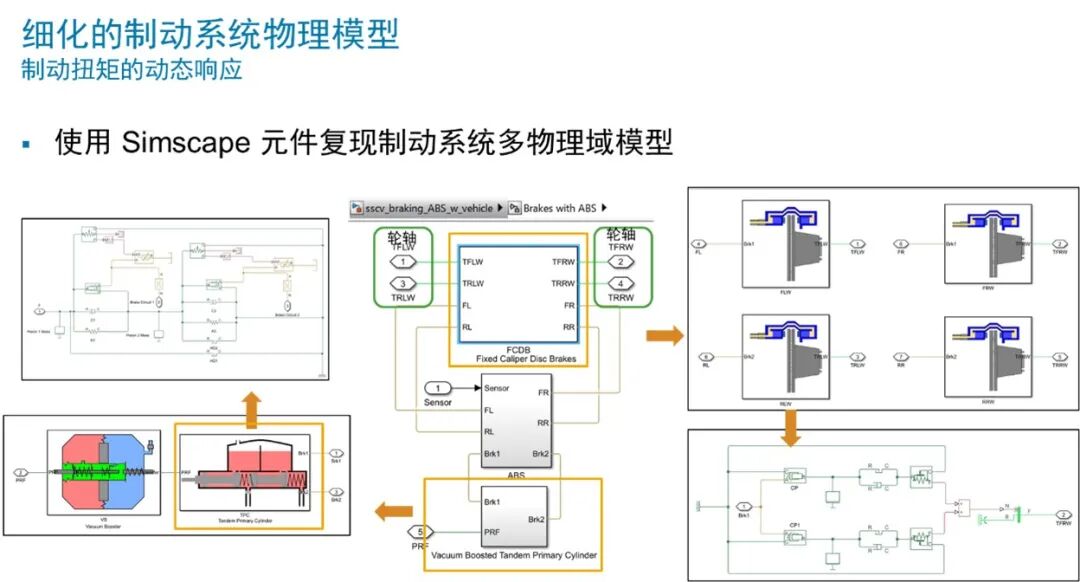
Simscape allows users to utilize a library of physical components to build models across multiple physical domains (such as mechanical, electrical, hydraulic, and thermal), which is particularly important for accurately simulating complex systems like braking hydraulic systems. Through Simscape, engineers can create models that closely resemble actual physical behavior, which can be used to gain a deeper understanding of system operation and for designing and testing control strategies.
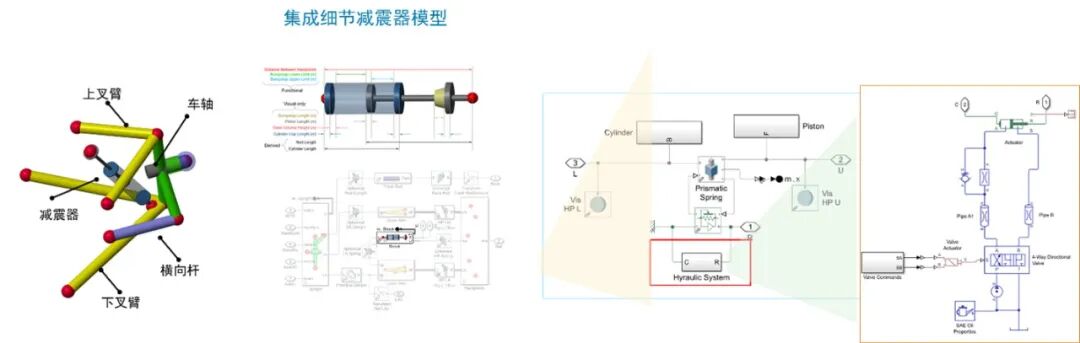
When simulating the braking hydraulic system, Simscape can help accurately simulate the dynamic behavior of hydraulic fluids and the interactions of various components within the system. For the steering electromechanical system, Simscape can combine the dynamic behaviors of electrical and mechanical systems to provide a more comprehensive and accurate model. In the modeling of suspension multibody systems, Simscape’s multibody dynamics capabilities can simulate complex mechanical connections and movements, providing powerful tools for the analysis and optimization of suspension systems.
By combining the rapid model-building capabilities of the Vehicle Dynamics Blockset with the detailed modeling capabilities of the Simscape physical modeling tool, engineers can create vehicle models that are both quick and accurate, which is crucial for developing and validating high-performance, highly intelligent automotive systems.
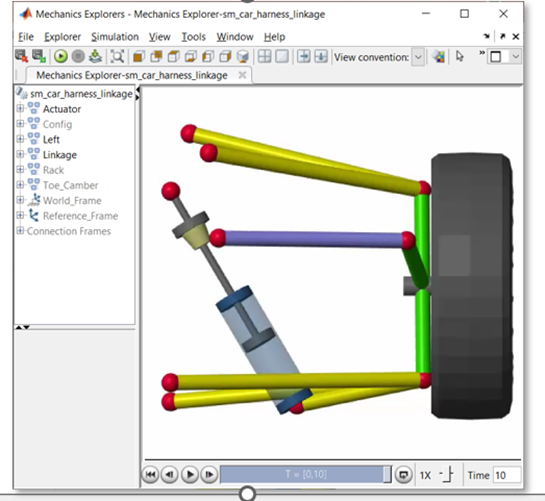
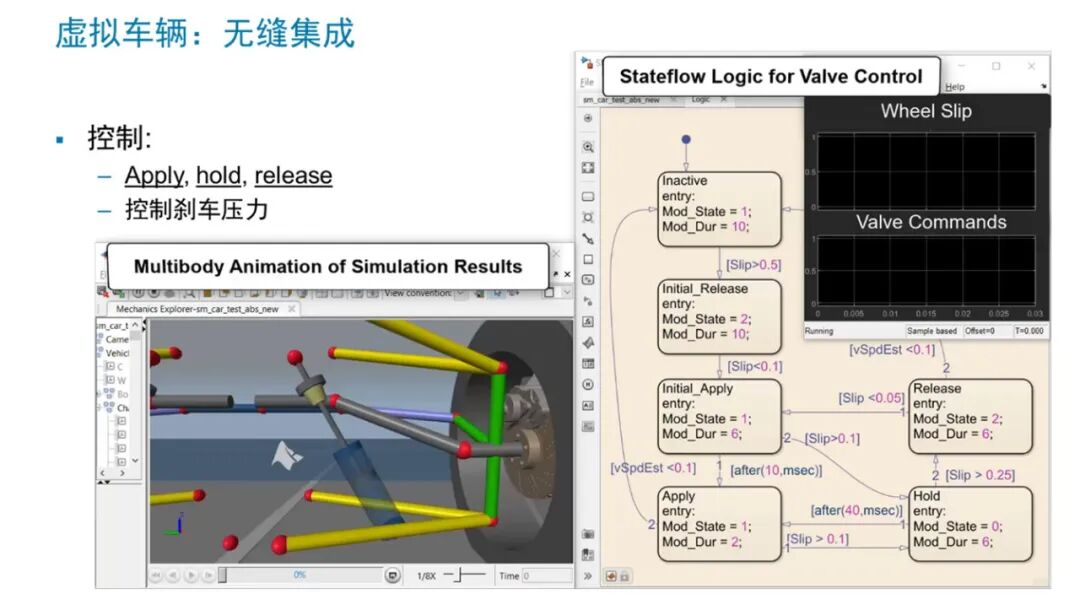
Using Simscape Multibody to Build Suspension Models:Control algorithms designed for active or semi-active suspension systems can improve vehicle handling and comfort.Simulink provides an interactive environment to test and validate these control strategies.
Electronic Hydraulic Braking Systems::Electronically controlled braking systems (such as ABS and Electronic Stability Program ESP) can be simulated in Simulink to ensure their performance under various driving conditions.
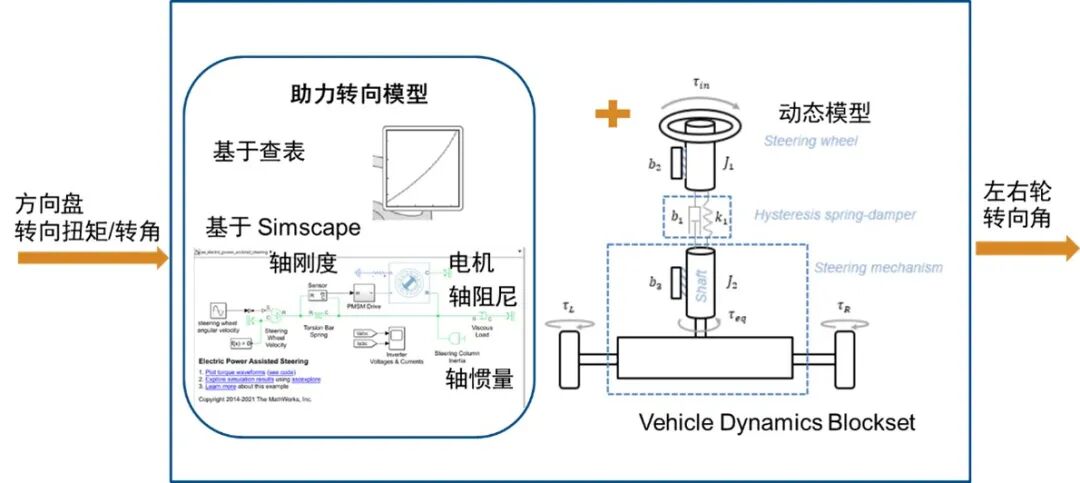
Steering Systems:Control logic for systems such as Electric Power Steering (EPS) or Active Front Steering (AFS) can be developed and tested in Simulink.
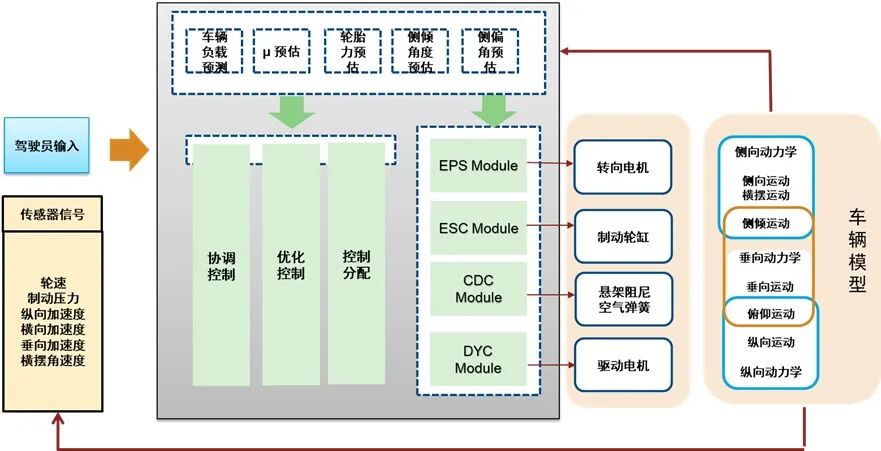
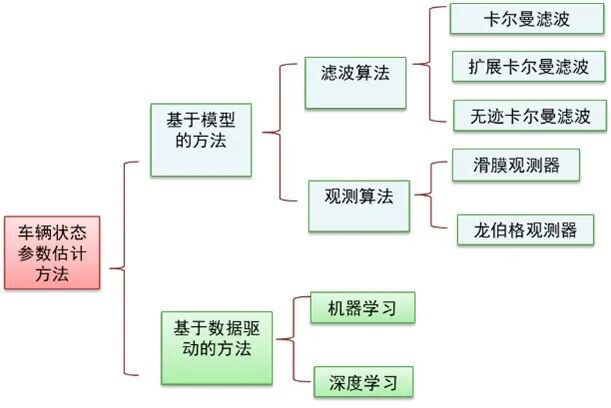
Once the physical model is completed, we can design the control algorithms for the chassis based on functional requirements. In an overall vehicle chassis control algorithm, the system can be divided into vehicle state information observation algorithms and control strategy methods.
The vehicle state information observation algorithm is the foundation of the chassis control system. It monitors and estimates various dynamic states of the vehicle, providing critical data for the formulation of control strategies. These algorithms typically require the use of various sensor data installed on the vehicle, such as wheel speed sensors, accelerometers, gyroscopes, steering angle sensors, etc., to observe or estimate the vehicle’s state.
Vehicle state information observation includes wheel torque, tire forces (lateral, longitudinal, vertical), vehicle speed and acceleration, ground friction coefficient, slope, yaw angle and yaw rate, tire parameters, front wheel angle, and the difference between expected and actual yaw angles. This data provides the vehicle control system with precise operational status.
However, whether each piece of information needs to be observed depends on specific requirements.
Observation methods can utilize MATLAB-based System Identification Toolbox and Controller Design Toolbox to design different observers.
Chassis control algorithms include:Pre-control based torque distribution strategies, vehicle traction control, yaw control, etc. Taking a yaw torque control framework as an example.
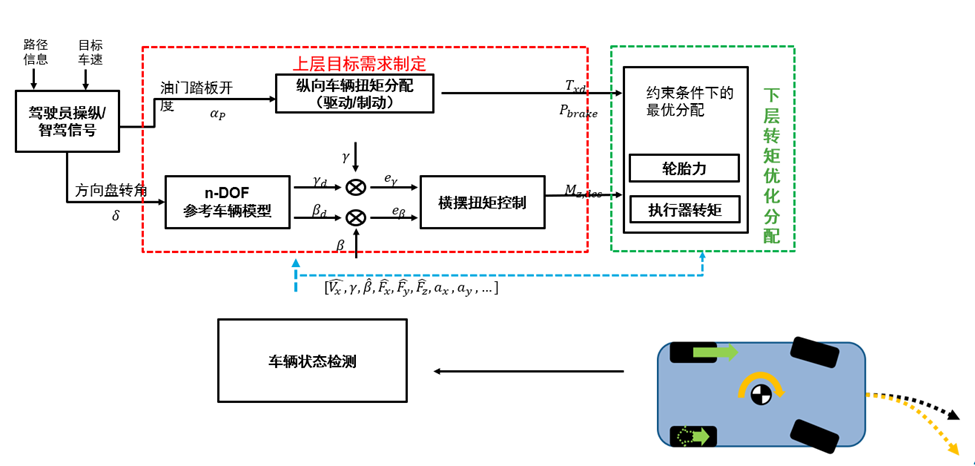
In this yaw torque control case framework, it includes the specification of upper-level target requirements and lower-level torque distribution.
In upper-level control, we perform feedforward control based on the driver’s steering angle signal to calculate the target yaw rate and target lateral offset. Then, feedback control is performed with the actual yaw rate and lateral offset observed from the vehicle state.
In this yaw torque control module, basic PID control can be used. More complex optimization controls can also be designed with MATLAB’s control toolbox, such as model predictive control, fuzzy logic control, and some learning-based controls.
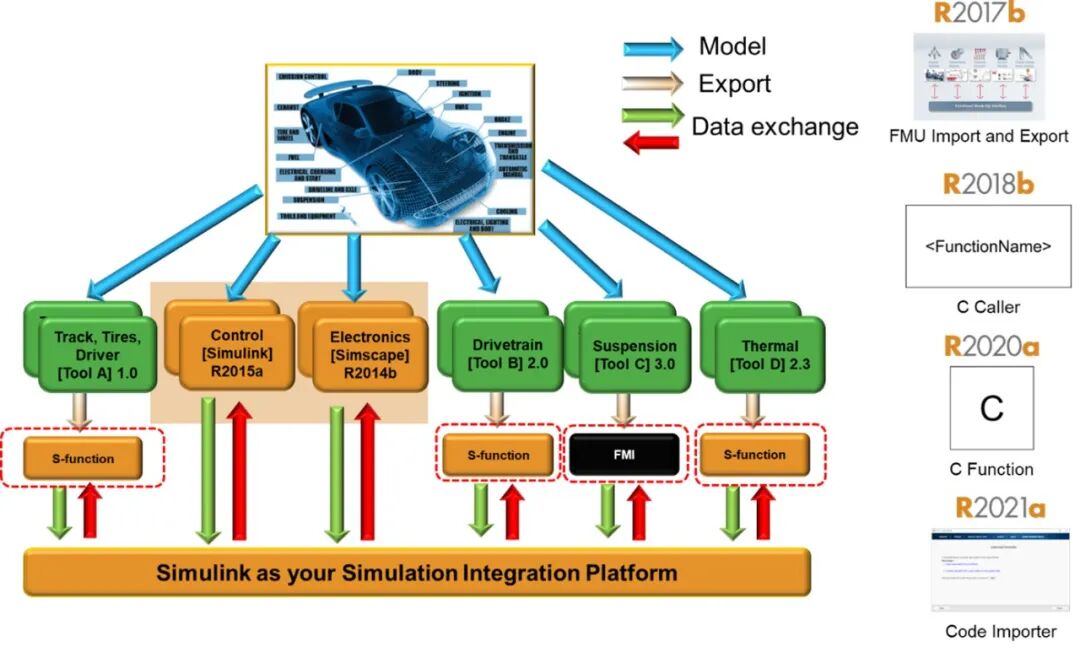
Simulink, beyond modeling, is also a virtual integration platform where algorithms, components, systems, and vehicle models from different fields, different software, and different versions can be integrated and simulated. The capabilities of importing and exporting FMUs, calling and importing C code, etc., are continuously improving and expanding Simulink’s capabilities as an integration platform.
▼
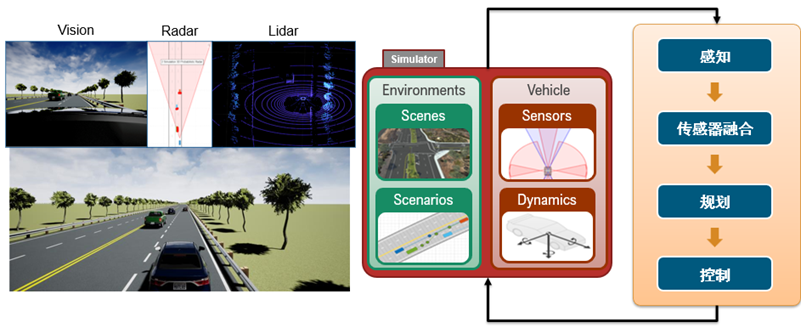
The integration of chassis function motion control often serves as an interface for intelligent driving, participating in the virtual verification of autonomous driving. The overall vehicle model and chassis control algorithms built on the MATLAB platform can be integrated into simulations with autonomous driving algorithms. On the MATLAB platform, relying on the Roadrunner scene modeling tool, the autonomous driving simulation framework for vehicles and scenes can be completed.
The chassis domain controller is the core of vehicle intelligence. As the level of intelligence increases, system complexity rises, and virtualization development and verification become effective means to address complexity challenges. Model-Based Development (MBD) is the cornerstone of virtualization, encompassing three key stages: virtual prototyping, virtual integration, and virtual verification. MATLAB provides a comprehensive solution for this process, including vehicle modeling, control design, integration verification, etc. This approach not only improves development efficiency and reduces error rates but also allows for the identification of issues before manufacturing actual prototypes, accelerating the development and market promotion of intelligent vehicles.
Welcome to follow the “Intelligent Chassis Home” public account: ClickRead the original text to join:Steer-by-wire, brake-by-wire, suspension-by-wire, chassis domain control, commercial vehicle steer-by-wire chassis, passenger vehicle steer-by-wire chassis, steer-by-wire chassis testing, steer-by-wire chassis motors, skateboard chassis angle modules, low-speed unmanned vehicle chassis10 WeChat technical groups
ClickRead the original text to join:Steer-by-wire, brake-by-wire, suspension-by-wire, chassis domain control, commercial vehicle steer-by-wire chassis, passenger vehicle steer-by-wire chassis, steer-by-wire chassis testing, steer-by-wire chassis motors, skateboard chassis angle modules, low-speed unmanned vehicle chassis10 WeChat technical groups