Volume 1 Issue 5 Concise Review

- University of Chinese Academy of Sciences, Beijing, 100049, China
- Zhejiang Key Laboratory of Magnetic Materials and Application Technology, Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences, Ningbo, 315201, China
- Eastern Institute of Technology, Ningbo, 315200, China
- Ningbo Institute of Digital Twin, Ningbo, 315201, China
https://doi.org/10.1016/j.revmat.2025.100110
01. Research BackgroundIn recent years, significant progress has been made in the fields of intelligent robotics and human-machine interaction. As a key enabling technology, tactile perception plays a crucial role in achieving more natural interactions and dexterous manipulation in these emerging fields, presenting both unprecedented opportunities and new challenges. Professor Runwei Li from the Chinese Academy of Sciences reviews the latest research advances in magnetic materials and sensors for tactile perception applications, focusing on the design strategies of magneto-elastomers and the development trends of magnetic sensors, and systematically introduces the practical applications of magnetic tactile sensors in robotics, human-machine interfaces, and healthcare. Finally, the technical challenges faced by magnetic tactile sensors are discussed in depth, and future development prospects are proposed.02. Illustrated Guide
The technology system of tactile sensors based on resistive, capacitive, inductive, triboelectric, and optoelectronic principles has matured. In recent years, driven by the rapid development in robotics, wearable devices, and related fields, the demand for high-performance tactile sensors has significantly increased. Existing systems not only need to achieve basic tactile detection but also require comprehensive capabilities such as high sensitivity, wide sensing range, high spatial resolution, multidimensional force perception, and excellent flexibility. Against this backdrop, magnetic tactile sensors have emerged as a new tactile perception technology (Figure 1).
A typical magnetic tactile sensor consists of a magneto-elastomer and a magnetic sensor array: the magneto-elastomer deforms under applied force and modulates the magnetic field distribution, while the magnetic sensor array detects the changes in the magnetic field and converts them into electrical signals for perception. Magnetic sensors have gained widespread attention due to their potential for high sensitivity, high spatial resolution, low power consumption, and high precision angle detection. These advantages not only drive the rapid development of magnetic tactile sensors but also endow them with unique properties: for example, compared to other types of tactile sensors, the non-contact sensing characteristics exhibited by magnetic sensors provide the system with exceptional durability and resistance to environmental interference; at the same time, the inherent vector characteristics of the magnetic field and the sensitive angular response of magnetic sensors enable magnetic tactile sensors to achieve multi-axis force detection, thereby simultaneously resolving normal pressure and tangential shear force. These characteristics make magnetic tactile perception technology an important technical pathway to address key tactile needs in high-performance electronic skin, dexterous robots, and precision medicine.
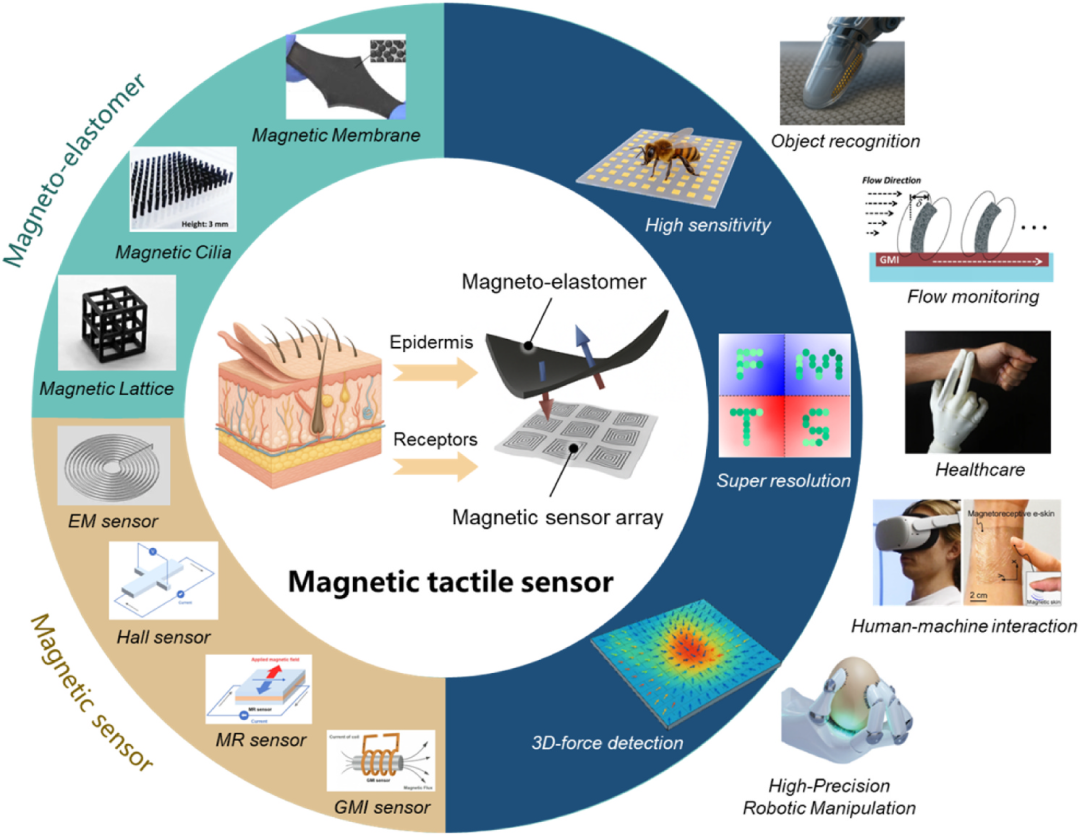
Fig. 1. Main components of the magnetic tactile sensor, its characteristics, and potential applications.
In magnetic tactile sensors, the magneto-elastomer serves as the core transduction medium, capable of converting external mechanical forces into measurable magnetic signals. When external forces are applied to this composite material, typically composed of polydimethylsiloxane (PDMS) embedded with neodymium-iron-boron (NdFeB) magnetic particles, it causes deformation of the material. This deformation process prompts the internal magnetic particles to displace and change orientation, thereby reconstructing the external magnetic field distribution, ultimately leading to corresponding changes in the intensity and direction of the magnetic stray field. At this point, the magnetic sensor detects these magnetic field changes and converts them into corresponding electrical signal outputs, thus achieving tactile perception (Figure 2).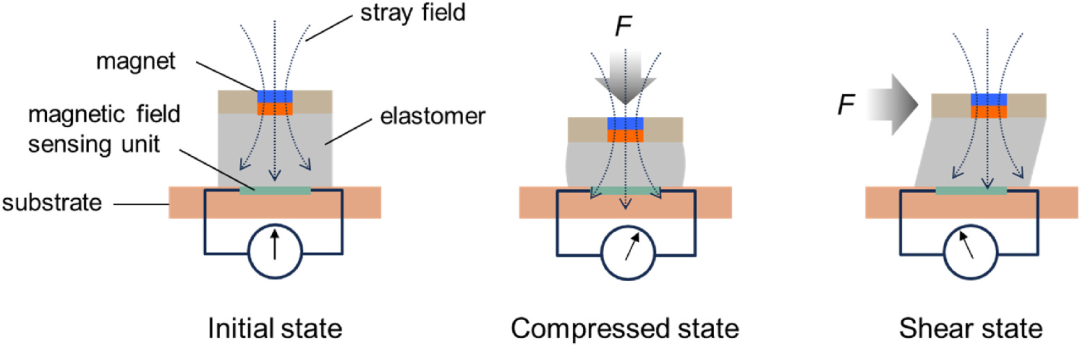
Fig. 2. Illustration of the working principle of the tactile sensor. Left: the initial state (no loading) of the sensor. Middle: deformation and output of the sensor under normal load. Right: deformation and output of the sensor under shear force.
03. Conclusion and Outlook
Over the past decade, magnetic tactile sensors have experienced rapid development, exhibiting trends of high sensitivity and high flexibility. Various magnetic sensors have been successfully applied in tactile perception technology, achieving micro-force detection at the milli-Newton and even micro-Newton levels, fully demonstrating the enormous potential of magnetic sensing technology in the field of tactile perception. Furthermore, through innovative designs of magneto-elastomers, additional functions such as three-dimensional force decoupling and high-precision perception of pressure and shear forces have been realized. However, despite significant research progress, magnetic tactile sensors are still in the early stages of development and face several core challenges that need to be addressed:
(1)Optimization of Magneto-Elastomer Performance: As the key functional medium for force-magnetic signal conversion, current magneto-elastomers still struggle to achieve high magnetic flux conversion efficiency, multi-dimensional force decoupling, rapid response, and low hysteresis characteristics simultaneously. Therefore, continuous optimization of material selection criteria, structural design paradigms, and magnetic performance control strategies is required: for example, developing creep-free elastomers to reduce hysteresis and improve response speed; utilizing data-driven reverse design methods through artificial intelligence to achieve high sensitivity and wide detection range simultaneously; and breaking through the limitations of traditional mold forming techniques to develop advanced processing technologies such as magnetic field-assisted additive manufacturing.
(2)Development of Flexible Magnetic Sensing Units: Achieving fully flexible magnetic tactile sensors requires overcoming the performance stability challenges of flexible magnetic sensing units under complex strain fields (bending, stretching, twisting). Current research indicates that stress-strain can alter the magnetic transition temperature, magnetic anisotropy, and magnetic domain structure of magnetic materials, thereby affecting core parameters such as sensor sensitivity and power consumption. Future research could focus on achieving strain isolation or uniform stress distribution through structural design, enhancing the deformability and mechanical stability of the devices.
(3)Pathways for Improving Spatial Resolution: For the fine operation needs of humanoid robots, tactile sensors need to possess both high force sensitivity and high spatial resolution. While array design can effectively enhance spatial resolution, increasing array density poses challenges such as a significant increase in data processing load, decreased signal readout rates, and rising power consumption for systems based on scanning circuit architectures. Solutions include developing magnetic sensing units with higher sensitivity and lower power consumption; promoting paradigm shifts in circuit architectures (e.g., adopting neuromorphic asynchronous scanning); and overcoming performance discrepancies among units caused by process fluctuations during fabrication to ensure overall consistency of the array.
(4)Multimodal Perception Fusion: Breaking through the current limitations of single force signal detection and developing multimodal artificial skin, such as temperature-tactile dual-mode sensing, is a key evolutionary direction. On the hardware basis, algorithms such as convolutional neural networks and artificial neural networks need to be employed for fusion analysis of multi-source signals, achieving a leap from “multimodal sensing” to “multimodal perception,” ultimately constructing a skin-like system with physiological signal detection capabilities.
Looking ahead, magnetic tactile sensors integrated with ultra-high performance, extreme flexibility, and multimodal perception capabilities will open up vast application spaces in cutting-edge fields such as precise operations in robotics, bionic electronic skin, and precision medicine.
04. Article InformationReference this article
Jiafeng Wu, Huali Yang, Mengting Zou, Yali Xie, Shengbin Li, Run-Wei Li, Advances in magnetic materials and sensors for tactile perception, Review of Materials Research, Volume 1, Issue 5, 2025, 100110, ISSN 3050-9130
Download Article
 05. Article Abstract
05. Article Abstract
In recent years, significant progress has been made in intelligent robotics and human-machine interaction. As a critical enabling technology, tactile sensing plays a pivotal role in facilitating more natural interactions and dexterous manipulation in these emerging fields, presenting both unprecedented opportunities and challenges. Magnetic tactile sensors emerge as strong contenders in tactile sensing technologies, offering distinct advantages such as high sensitivity, superior spatial resolution, robust endurance, and multidirectional force detection capabilities. This review summarizes the recent advances in magnetic materials and sensors for tactile sensing applications. The design strategies of magneto-elastomers and development trends of magnetic sensors for tactile perception are highlighted. In addition, the implementation of magnetic tactile sensors across various fields, such as robotics, human-machine interfaces, and healthcare are presented. Finally, we delve into the technical challenges of magnetic tactile sensors and put forward some future perspectives.
06. Journal Introduction
The Journal of the Chinese Materials Research Society (Review of Materials Research) was founded in 2025, sponsored by the Chinese Materials Research Society and published globally by Elsevier. As an international, interdisciplinary, high-level academic monthly journal, it aims to serve cutting-edge research and innovative development in the global materials science and technology field, with an initial plan to publish approximately 300 high-quality papers annually.
This journal covers several important research directions in materials science, focusing on the latest research results and technological advancements in the following four major areas:
Latest Research Reports(Flash Report)Concise ReviewsComprehensive SurveysStrategic Commentaries
The journal implements an organizational model of “editorial board leadership, advisory committee guidance, and executive committee operation,” establishing an academic committee system composed of several authoritative experts in the materials field, including the journal’s editorial board, international advisory committee, and journal executive committee.
The chairman of the editorial board is Academician Wei Bingbo (Academician of the Chinese Academy of Sciences, President of the Chinese Materials Research Society, Professor at Northwestern Polytechnical University).
The chairman of the international advisory committee is Academician Duan Wenhui (Academician of the Chinese Academy of Sciences, Professor at the Department of Physics, Tsinghua University).
The journal has set up three deputy editors, namely: Professor Lü Zhaoping (Beijing University of Science and Technology), Professor Zhou Kechao (Central South University), and Professor Zhu Min (South China University of Technology).
There are four subject editors: Professor Chen Renjie (Beijing University of Science and Technology), Professor He Jie (Chinese Academy of Sciences), Professor Huang Lujun (Harbin Institute of Technology), and Professor Chen Hongzheng (Zhejiang University).
The editorial board includes (in alphabetical order by surname): Professor Feng Jicai, Professor Li Runwei, Professor Li Xiaoguang, Professor Meng Guowen, Professor Ruan Ying, Professor Sun Baode, Professor Sun Dalin, Professor Wu Jianlao, Professor Wu Xiaolei, Professor Yang Sen, Professor Zhao Naiqin, Professor Zheng Weitao, and others.
The international advisory committee members include (in alphabetical order by surname): Academician Chen Lidong, Professor Junjun Jia (Japan), Professor Jinhyeok Kim (Korea), Professor Sangwoo Kim (Korea), Professor Inhwan Lee (Korea), Academician Liu Changsheng, Academician Liu Yichun, Academician Nan Cewen, Academician Nie Zhuoren, Academician Sun Jun, Academician Tian Yongjun, Academician Huaming Wang, Academician Zhang Di, Professor Lianmeng Zhang, Academician Zhang Pingxiang, Academician Zhu Meifang, Professor Zuo Liang, and others.
The journal’s official website:
