The world’s smallest and lightest micro Delta robot has arrived!
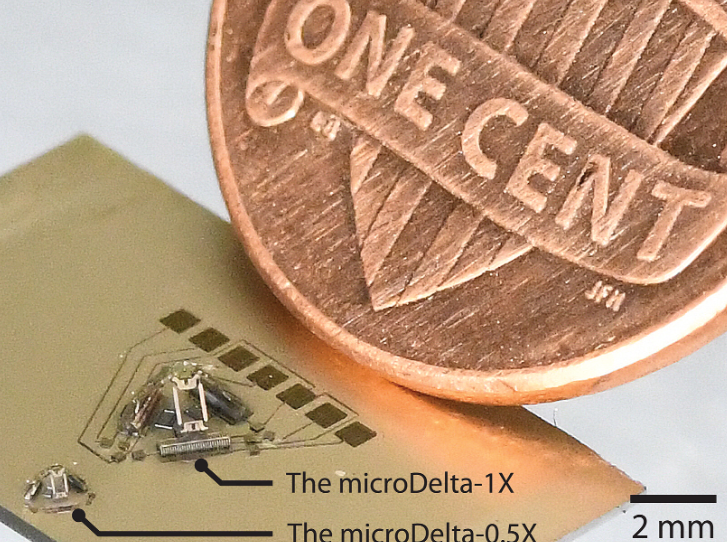
Its base diameter is only 1.6 millimeters, and its height is just 0.723 millimeters.
According to X-robot, which explores the frontiers of technology and conveys cutting-edge scientific achievements, this research comes from the Robotics Institute at Carnegie Mellon University. This robot exhibits excellent capabilities, achieving ultra-fast motion and extremely high precision at a millimeter scale: its resonance frequency reaches 1050 Hz, and its motion accuracy can be as precise as 0.2 μm, which is about 1/20th the diameter of a human hair.
The core technological breakthrough of this research lies in the successful use of micro-scale 3D printing technology to “miniaturize” the Delta parallel robot mechanism, innovatively employing “flexible joints” and “3D electrostatic comb actuators” to replace traditional designs, thus solving the challenges of friction, gaps, and actuation at micro scales.
Recently, the related paper titled “The microDelta: Downscaling robot mechanisms enables ultrafast and high-precision movement” was published in the prestigious international robotics journal, Science Robotics.
Core Breakthrough: “Precision Craftsmanship” at Micro and Nano Scales
To manufacture such a tiny robot, the first challenge is to solve the question of “how to make it.” Traditional processing methods struggle to achieve such fine structures; standard 3D printing lacks sufficient precision; and two-dimensional microfabrication techniques often require manual assembly, which is not only inefficient but also prone to damaging the structure.
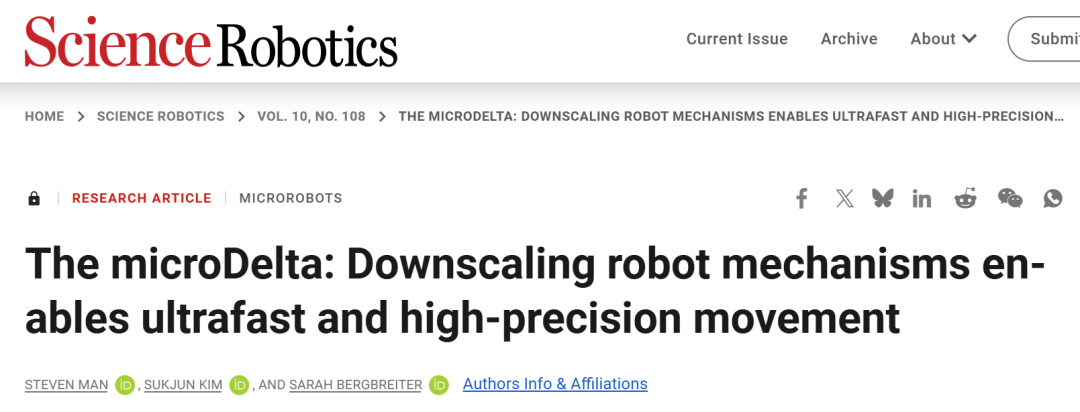
Micro Delta Robot
To address this, the research team chose “two-photon polymerization (TPP) 3D printing” technology. This technique uses ultrashort pulse lasers to precisely initiate polymerization reactions within photosensitive resin, enabling the printing of structures with minimum feature sizes below 100 nanometers, thus achieving high-precision manufacturing of the entire robot mechanism in one go.
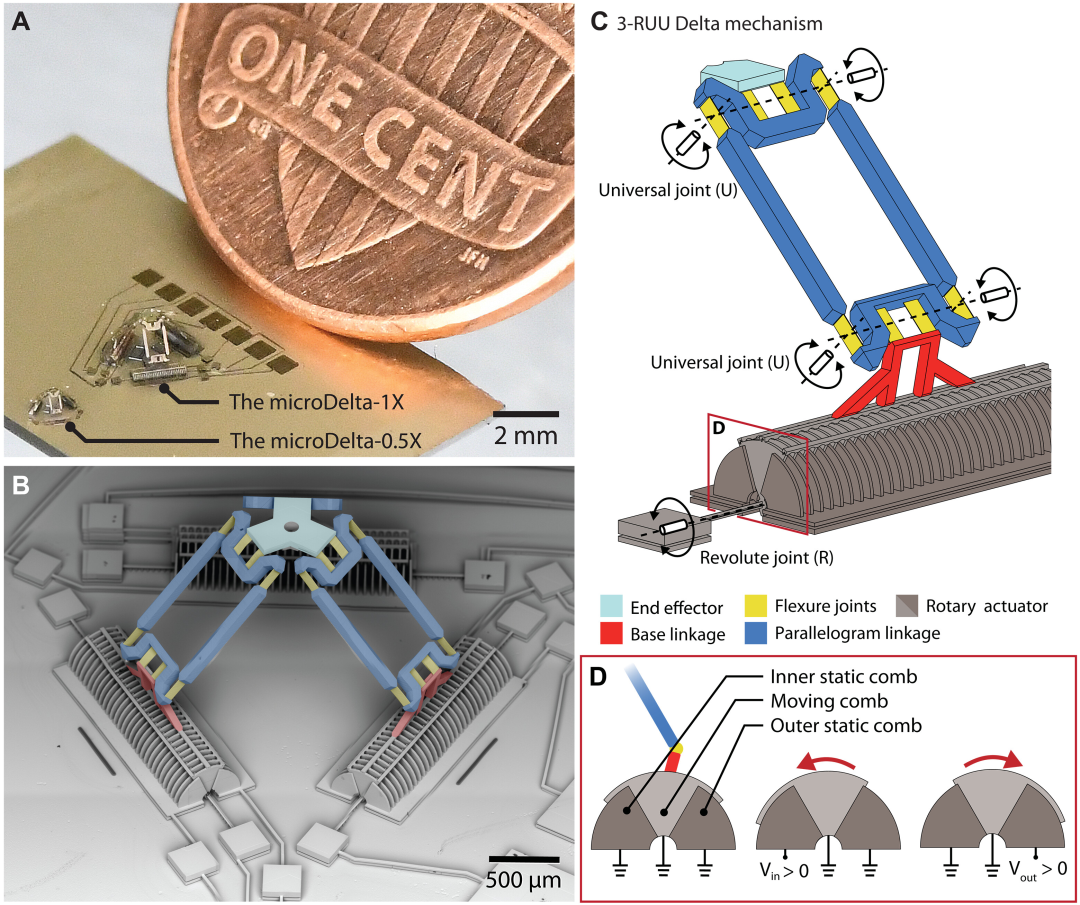
The manufacturing process of the micro Delta robot consists of three key steps: first, using TPP technology to integratively print a complete robot mechanism that includes rotating actuators, flexible joints, and motion links on a highly doped silicon substrate; next, selectively removing the silicon substrate through XeF₂ vapor etching to release the movable structures; finally, depositing a gold layer approximately 50 nanometers thick on the surface of the polymer structure using magnetron sputtering to form conductive pathways, providing necessary electrodes for electrostatic actuation.
Manufacturing Process of the Micro Delta
Despite its small size, its internal structure is quite sophisticated. It belongs to the class of parallel robots, with three legs connecting the base to the end effector platform, which provides stability in motion and strong load-bearing capacity. Unlike traditional Delta robots that use hinges, all joints of the micro Delta are realized through the elastic deformation of the material itself, known as “flexible joints,” which avoids issues of friction and gaps at small scales. The motion of these robots is driven by the meticulously designed 3D electrostatic comb actuators. The working principle can be simply understood as controlling the voltage changes of the “inner and outer static comb actuators” to drive the rotation of the middle “moving comb actuator,” allowing precise control of the robot’s input angles, and this actuator responds extremely quickly.
The core advantage of this manufacturing strategy lies in achieving integrated molding of the mechanism and actuators, avoiding the complex assembly processes at micro scales. Through the high-resolution manufacturing capability of TPP technology, researchers can precisely control key parameters such as the stiffness of flexible hinges and the inertia of mass blocks at sub-μm scales, providing possibilities for optimizing the dynamic performance of the robot.
Performance Testing: Small Size, Big Power
The team manufactured two sizes of micro Delta robots: the larger microDelta-1X has a base diameter of 3.2 millimeters and a height of 1.4 millimeters; the smaller microDelta-0.5X is a scaled-down version with a base diameter of only 1.6 millimeters and a height of just 0.723 millimeters. Compared to previously reported similar robots, their volume has been reduced by an order of magnitude.
In actual tests, this micro robot demonstrated outstanding performance. Test data shows that the resonance frequency of the microDelta-0.5X reaches 1050 Hz, meaning its end effector can reciprocate at a frequency of 1050 times per second, far exceeding the performance levels of existing Delta robots. Even at a high frequency of 1600 Hz, it can maintain stable motion without significant amplitude decay.
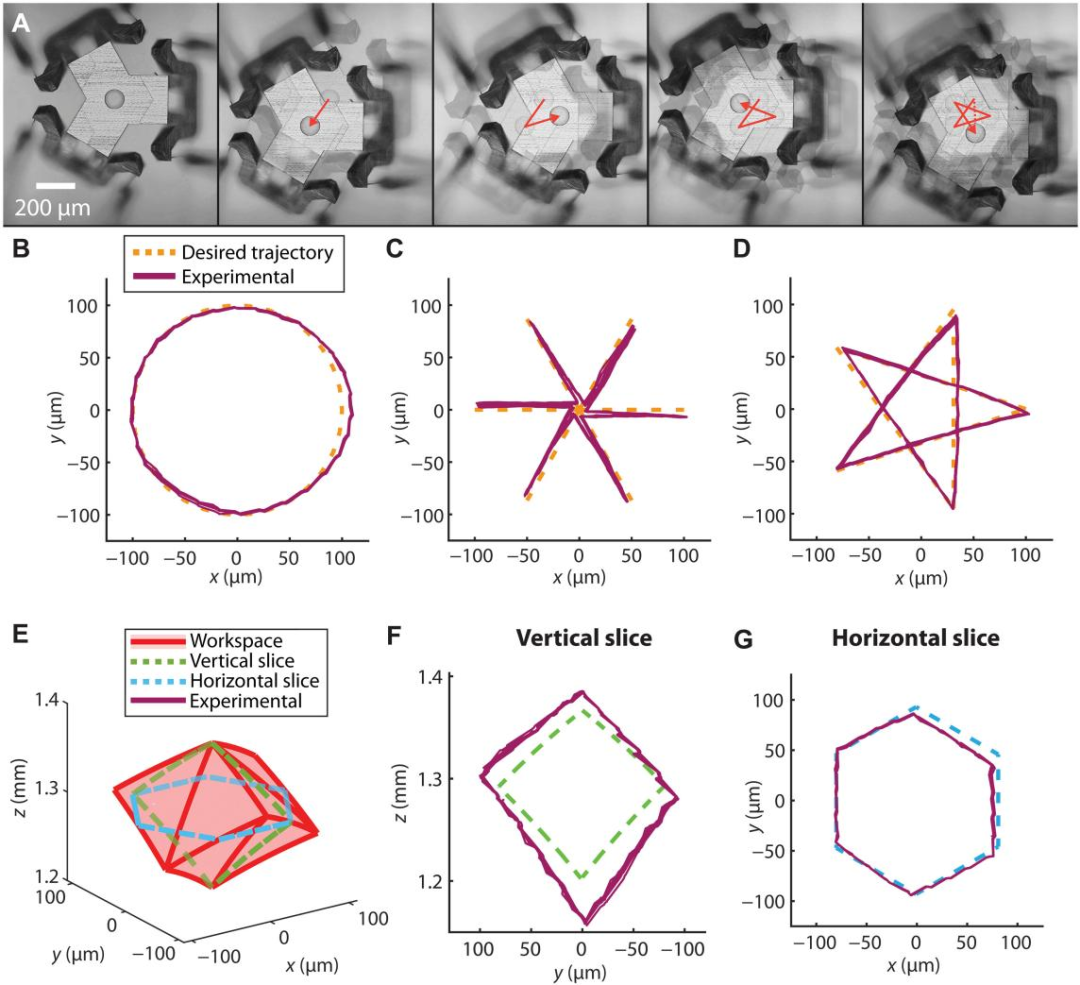
Results of the quasi-static trajectory tracking and workspace characterization of microDelta-1X
In terms of accuracy, the performance is equally impressive. When moving along a star-shaped trajectory, the root mean square error of microDelta-1X is only 4.6 μm; the smaller microDelta-0.5X performs even better, achieving a root mean square accuracy of 0.2 μm along a circular trajectory, and only 0.7 μm along the star-shaped trajectory. This level of precision is sufficient to meet the demands of high-end applications such as microelectronic assembly and cellular manipulation, for instance, accurately grasping cells with a diameter of 1 μm or placing microchips with an error not exceeding the width of a nanowire.
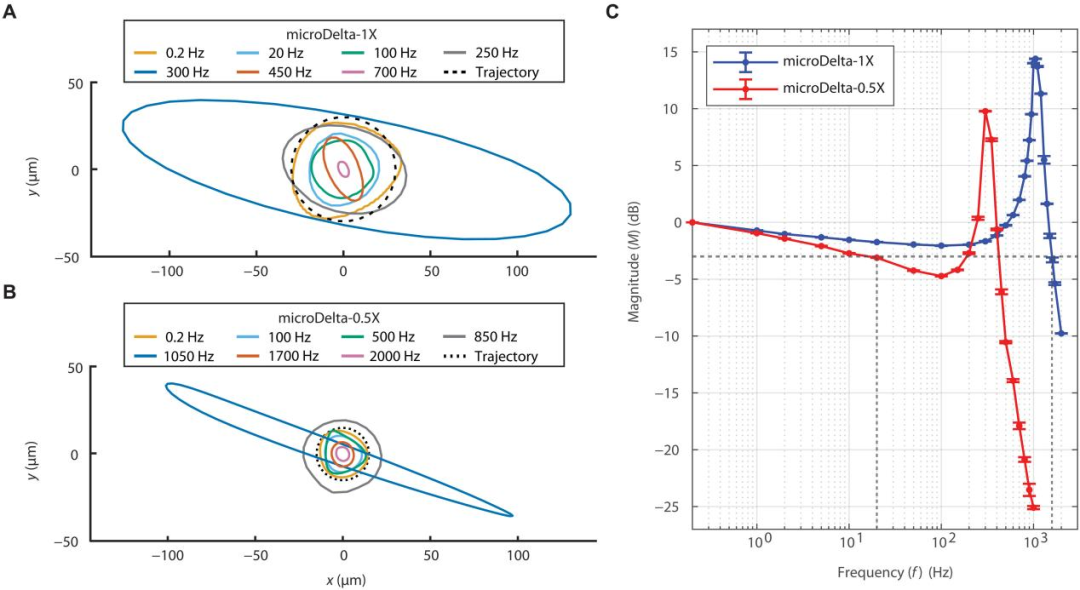
Frequency response of the micro Delta
In terms of workspace, microDelta-1X has a movement range of 150-200 μm in the x, y, and z directions. Although the absolute space is not large, its activity range is quite considerable relative to its own size. The team verified its flexibility by having the robot move along the boundaries of its workspace, and the results showed that the trajectory tracking error in the xy plane was minimal, with only slight deviations in the z-axis direction due to insufficient calibration.
Additionally, to test its practical application capabilities, the team designed an interesting experiment: having microDelta-1X launch micro projectiles. In the experiment, they placed a salt grain weighing 37 μg on the robot’s end effector, gradually loading voltage to store elastic potential energy, and then suddenly releasing the energy to launch the salt grain at high speed. High-speed cameras captured that the salt grain reached a maximum height of 4 millimeters, equivalent to 12.5 times its own diameter, with a launch speed of 303 mm/s, which means that the micro Delta device transferred 1.7 nJ of energy to the projectile, with an average power of 1.2 μW.
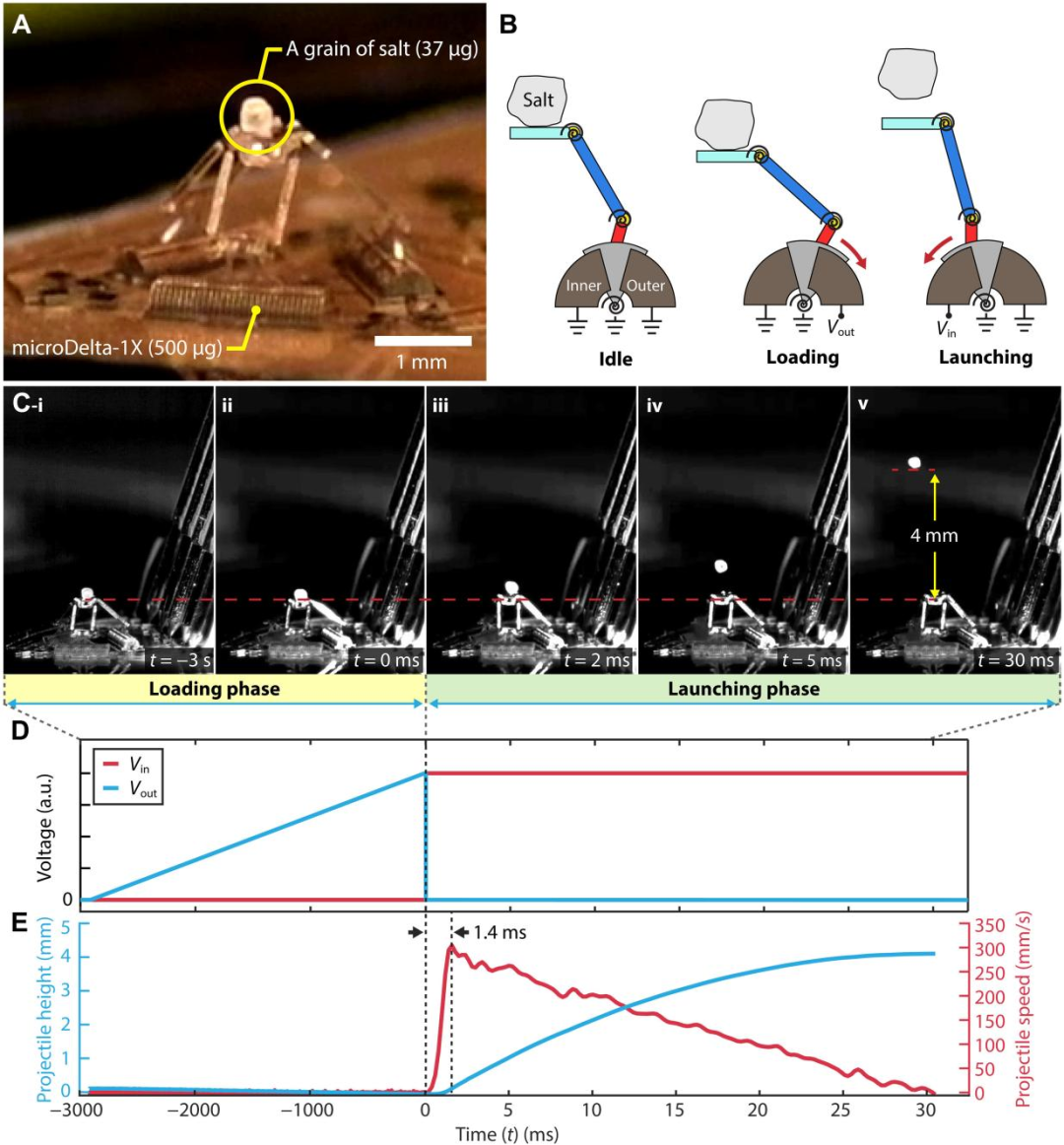
Projectile Launch Experiment
This seemingly simple experiment is significant: it demonstrates that the micro Delta robot can not only achieve precise motion but also transmit mechanical work to the environment, sufficient to overcome the common surface adhesion forces of micro-scale objects. This means that in practical applications, it can perform complex tasks such as “pick-and-place” of micro parts and releasing adhered biological samples, addressing core challenges in the field of micro manipulation.
Collision of Theory and Reality
Despite its excellent performance, there are discrepancies between the measured data of the micro Delta robot and theoretical scaling predictions. For instance, when the robot’s size is halved, the actuator torque should also be halved, the stiffness of the flexible joints should become 1/8, and the angular displacement should become 4 times. However, in actual tests, the torque of microDelta-0.5X was lower than expected, and the angular displacement was only 0.76 times that of microDelta-1X, not reaching the theoretical value of 4 times.
These discrepancies stem from manufacturing limitations at micro scales. First, the gaps between the comb fingers become smaller when scaled down, making it easier to encounter stickiness during manufacturing, leading the team to reduce the number of comb teeth and increase their width, resulting in decreased torque; second, the voxel height of 3D printing limited the minimum thickness of the flexible joints, causing the actual stiffness to be 3.2 times higher than the design value; additionally, the metallization process at micro scales is difficult to ensure uniform coverage, which can also affect the performance of the electrostatic actuators.
However, there were also unexpected gains. Due to the stiffness of the flexible joints being higher than expected, the resonance frequency of microDelta-0.5X reached 3000 Hz, which is 1.75 times the theoretical value, further enhancing its high-speed motion capabilities. The impact of air damping was also lower than expected; even at atmospheric pressure, the robot’s high-frequency motion was not significantly hindered—this means it does not need to operate in a vacuum environment, lowering the application threshold.
The birth of the micro Delta robot not only validates the applicability of scaling laws in millimeter-scale robots but also showcases the tremendous potential of 3D printing technology in precision manufacturing. From a technical perspective, this achievement integrates cutting-edge technologies from multiple fields, including materials science, mechanical design, and micro-nano manufacturing, providing a new paradigm for the development of micro robots; from an application value perspective, it is expected to address core pain points in micro manipulation and micro manufacturing, driving related industries towards smaller, finer, and faster directions.
With the continuous advancement of manufacturing processes, future micro robots may shrink to the μm level, or even achieve the practical application of “nanorobots.”
We invite customers and industry colleagues to experience the new features of the “National Robot and Intelligent Manufacturing Achievement Transformation Public Service Platform”! You can scan the QR code below or click “Read the original text” to jump to the official website for more surprises.
Today’s Recommended Articles
Good news! The Party Branch of the Zhongguancun Robot Industry Innovation Center has been awarded funding support for non-public enterprise party organizations in the city for 2025.
Robots are ushering in an Android moment: Zhi Shi Intelligent has launched insightOS, equipping robots with a domestic operating system to co-build the industrial ecosystem.
From technological breakthroughs to large-scale applications, Zhi Miao Future empowers new industrialization to improve quality and efficiency.


If you find this helpfulclick the “Like” button in the lower right corner to let more people see it~