✅ Author Profile: A research enthusiast and MATLAB simulation developer, skilled in data processing, modeling simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Personal Homepage:MATLAB Research Studio
🍊 Personal Motto: Seek knowledge through exploration; feel free to message for help.
🔥 Content Introduction
In recent years, the rapid development of UAV technology has brought many conveniences but also new safety challenges. Accurate and reliable UAV positioning technology has become key to ensuring airspace safety and efficient management. Compared to traditional active radar-based positioning methods, passive radar technology shows great potential in the field of UAV positioning due to its advantages of concealment, anti-jamming capability, and cost-effectiveness, making it a hot research topic. This article will delve into passive radar UAV positioning methods, analyzing their working principles, advantages, and shortcomings, and looking ahead to future development directions.
Passive radar systems differ from active radar in that they do not emit their own electromagnetic signals but instead utilize existing electromagnetic radiation sources in the environment (such as broadcast television signals, communication signals, etc.) as illumination sources for detecting targets. The UAV’s own reflection characteristics or disturbances to the environmental electromagnetic waves will produce slight signal changes at the receiver end. By receiving, processing, and analyzing these weak signals, UAV positioning can be achieved. This “light borrowing” positioning method endows passive radar systems with unique advantages:
First, passive radar has good concealment. Since it does not emit signals, passive radar systems are difficult to detect and identify by targets, making them less susceptible to enemy anti-radiation weapons, which is a significant advantage in military reconnaissance and counter-terrorism. In contrast, the signal emissions of active radar expose its own location, making it an easy target for attacks.
Second, passive radar has strong anti-jamming capabilities. Active radar is easily affected by various interference signals, while passive radar utilizes opportunistic signals in the environment, which typically have higher stability and anti-jamming capabilities, thus making passive radar systems less sensitive to electromagnetic interference.
Third, passive radar has a high cost-performance ratio. Passive radar systems do not require high-power signal emissions, resulting in relatively low hardware costs and lower power consumption, making them more practical in resource-constrained environments.
However, passive radar UAV positioning methods also face many challenges:
First, the signals are weak, and the signal-to-noise ratio is low. The signals received by passive radar are very weak and often drowned in environmental noise, which poses significant difficulties for signal processing. Advanced signal processing techniques, such as adaptive filtering and beamforming, are needed to improve the signal-to-noise ratio and extract effective target information.
Second, the effects of multipath and scattering. Electromagnetic waves undergo reflection, refraction, and scattering during propagation, leading to multipath effects that affect positioning accuracy. Accurately modeling and compensating for multipath effects is a key challenge in passive radar positioning technology.
Third, positioning accuracy is greatly affected by the environment. The positioning accuracy of passive radar is closely related to the distribution of opportunistic signals in the environment, the reflection characteristics of the target, and the performance of the receiver. In complex electromagnetic environments, positioning accuracy may be limited.
Finally, the data processing workload is large. Passive radar requires processing a large amount of data, leading to high demands on computational resources. Efficient algorithms and high-performance hardware platforms are key to achieving real-time positioning.
To address the above challenges, current research mainly focuses on the following areas:
-
Development of advanced signal processing algorithms: For example, signal processing algorithms based on compressed sensing, sparse representation, and deep learning can effectively improve the signal-to-noise ratio and reduce computational complexity.
-
Multi-sensor fusion technology: Combining multiple passive radar sensors can improve positioning accuracy and reliability, overcoming the shortcomings of single sensors.
-
Refined environmental modeling: Establishing accurate electromagnetic propagation models can effectively compensate for multipath and scattering effects, improving positioning accuracy.
-
Application of artificial intelligence technologies: Utilizing artificial intelligence technologies, such as deep learning and machine learning, can achieve automatic target recognition and tracking, enhancing positioning efficiency.
In summary, passive radar technology has broad application prospects in UAV positioning. Its advantages of concealment, anti-jamming capability, and cost-effectiveness make it an important development direction for future UAV positioning technology. However, challenges such as weak signals and multipath effects still need further research and breakthroughs. In the future, with the continuous development of signal processing technology, sensor technology, and artificial intelligence technology, passive radar UAV positioning technology will surely see wider applications, contributing significantly to ensuring airspace safety and improving UAV management efficiency. Continuous investment in research and interdisciplinary collaboration will be key to advancing the maturity of this technology.
📣 Sample Code
rr = 1:length(ID)
radar{rr} = RadarInitialize(radarLoc(rr, :), ID(rr), M(rr), r0(rr));
end
% Initialize target
for tt = 1:length(targetID)
target{tt} = TargetInitialize(targetLoc(tt, :), targetVel(tt, :), targetID(tt));
end
signal = CosCircleGenerate(radar, target, 2.4e9, 1e-10, 1e3, 3);
for rr = 1:length(radar)
% angle = MUSIC(signal{rr}, 3, 360, 90, 2.4e9, radar{rr}.r0);
angle = MVDR(signal{rr}, 360, 90, 2.4e9, radar{rr}.r0);
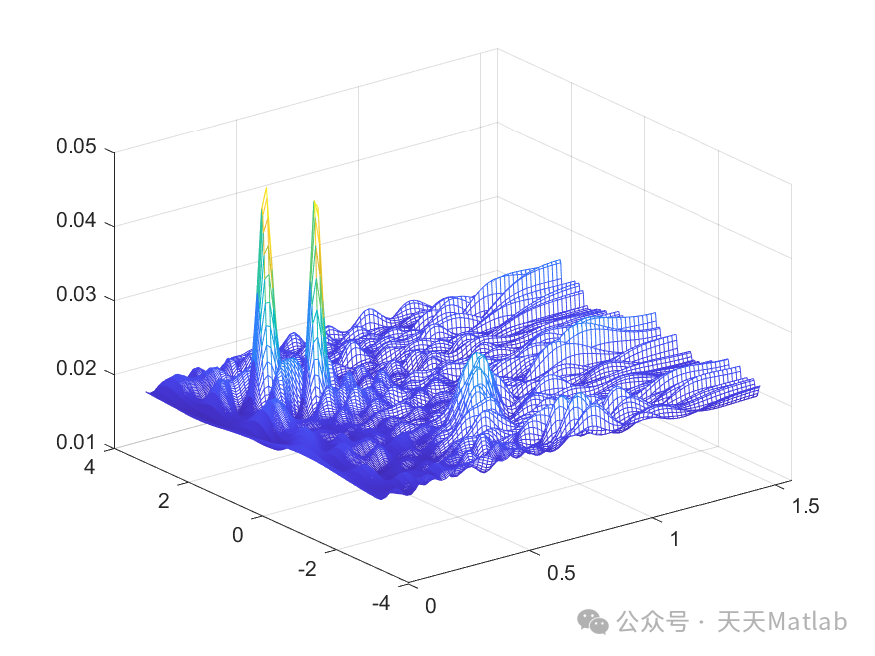
figure(10000)
title(‘MUSIC Estimation Result’)
xlabel(‘Pitch Angle’)
ylabel(‘Azimuth Angle’)
mesh(angleElAxis, angleAzAxis, abs(
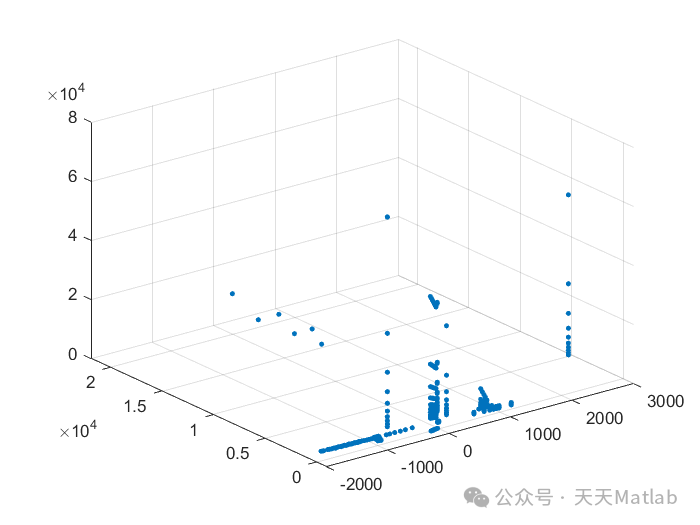
⛳️ Results
🔗 References
🎈 Some theoretical references are from online literature; please contact the author for removal if there is any infringement.
👇 Follow me to receive a wealth of MATLAB e-books and mathematical modeling materials.
🎁 Message for complete code and data acquisition, as well as customized simulation for papers and models.
Areas of Expertise:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo location optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and UAV site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency supply distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle routing planning (2E-VRP), electric vehicle routing planning (EVRP), hybrid vehicle routing planning, mixed flow workshop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection routing planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization.
🌈 Time series, regression, classification, clustering, and dimensionality reduction in machine learning and deep learning
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis function neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations of time series, regression prediction, and classification
Directions cover wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise subway stop prediction, transformer fault diagnosis.
🌈 Image processing aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing.
🌈 Path planning aspects
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), UAV three-dimensional path planning, UAV collaboration, UAV formation, robot path planning, grid map path planning, multimodal transport problems, electric vehicle routing planning (EVRP), two-layer vehicle routing planning (2E-VRP), hybrid vehicle routing planning, ship trajectory planning, full path planning, warehouse patrol.
🌈 UAV application aspects
UAV path planning, UAV control, UAV formation, UAV collaboration, UAV task allocation, UAV secure communication trajectory online optimization, vehicle collaborative UAV path planning.
🌈 Communication aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater acoustic communication, communication upload and download allocation.
🌈 Signal processing aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, EMG signals, EEG signals, signal timing optimization, ECG signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 Power system aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 Cellular automata aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 Radar aspects
Kalman filter tracking, track association, track fusion, SOC estimation, array optimization, NLOS identification.
🌈 Workshop scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero-idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP).
👇