Ultrasonic Sensors Provide More Economical
Positioning Solutions for Drones

Determining the exact position of a robot or drone in 3D space is a challenging task. Standard GPS accuracy is quite low, which is why navigation systems sometimes think you are driving on a nearby road rather than the actual road you are on. GPS-RTK (Global Positioning System-Real Time Kinematics) can greatly improve this, but it requires additional telemetry data to correct the GPS signal, which can be quite expensive. To make drone positioning more affordable, James Bruton developed a system based on ultrasonic sensors.
Bruton started this experiment to coordinate the movements of drones (similar to a drone show). Even the simplest performances require coordination among many independent drones, each of which needs to know its exact position. Equipping them with GPS-RTK is very costly, making it difficult for organizations without substantial funding to conduct drone shows. Bruton believed he could create a cheap alternative using ultrasonic sensors.
A typical ultrasonic sensor, like those found at any online retailer, emits pulse waves through an ultrasonic transducer and listens for echoes to determine location. The time difference between the emitted pulse and the received echo, multiplied by the speed of sound, equals twice the distance from the ultrasonic sensor to the reflecting surface. However, this method works best when the ultrasonic waves reflect off hard surfaces, meaning a single ultrasonic sensor cannot determine location in outdoor spaces.
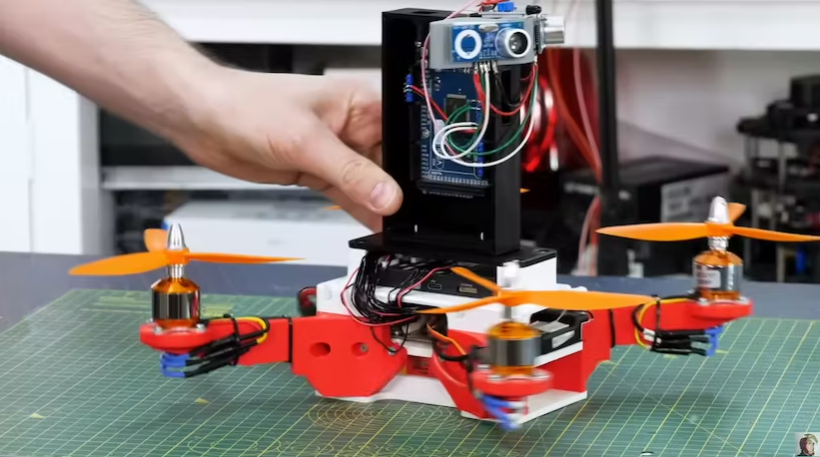
Bruton’s solution is to use a pair of ultrasonic sensors, with one sensor fixed in place to emit pulses and the other sensor mounted on the drone to listen for the ultrasonic pulses. The time between the pulse and the received signal, multiplied by the speed of the signal, gives the distance between the two sensors. By using two sensors, the drone can measure its position in a two-dimensional plane. If Bruton adds a third sensor, the drone can be positioned in 3D space.
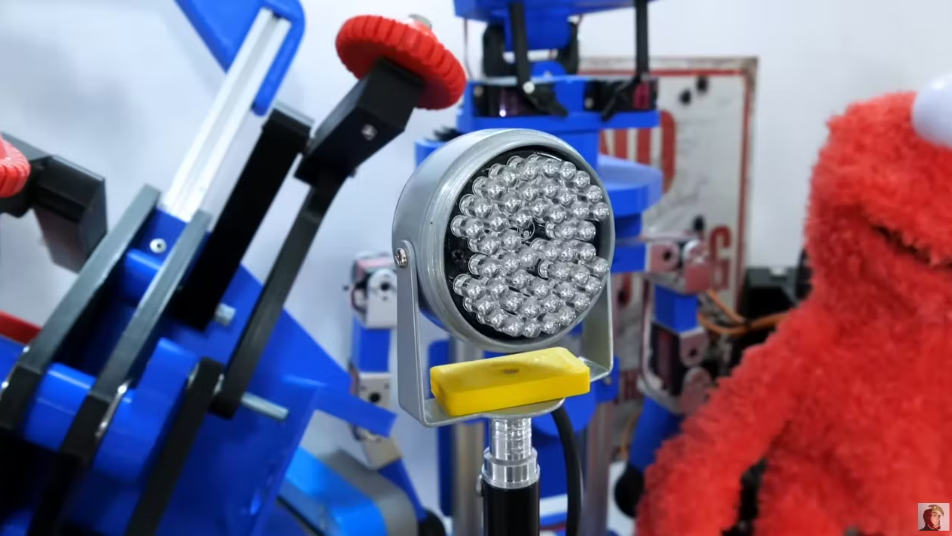
However, this only works if the emitting and receiving ultrasonic sensors are synchronized. Otherwise, the receiver does not know the time of pulse transmission and cannot calculate the distance. To synchronize the ultrasonic sensors, Bruton used an infrared LED array and infrared sensors. The infrared LEDs flash at a relatively fast rate, and when they first turn on (rising edge), this signals to the drone that one of the ultrasonic sensors has just emitted a pulse. When they turn off (falling edge), this signals to the drone that the other ultrasonic sensor has emitted a pulse. The third ultrasonic sensor (for 3D positioning) will require some additional synchronization signals.
Earth Hour

“
This method has achieved good results; it is quite accurate, fast, and has a long positioning range, all achievable with affordable hardware: one Arduino Mega 2560 for the drone and another for each transmitter. However, at this stage, the electromagnetic interference from the drone’s motors is too great to obtain reliable readings. Bruton will try another method for drone positioning, but this ultrasonic positioning system remains useful for traditional robots and other situations with minimal electromagnetic interference.

On the Path of Scientific Research
Quietly Accompanying You
WeChat ID|ioa-lib