A tactile sensing array is a tactile sensor composed of multiple tactile sensing units. Each tactile sensing unit can measure the contact force at a single point, while the tactile sensing array, by integrating multiple sensing units, has the capability to detect distributed contact forces. Currently, there are various methods to implement tactile sensing, which can be categorized based on their principles into piezoresistive, piezoelectric, capacitive, fluidic, optical, and transistor types..
PART.1
Piezoresistive Tactile Sensing
Piezoresistive materials change their electrical resistance when subjected to external pressure. By detecting the change in resistance, the applied pressure can be measured, thus allowing the use of piezoresistive materials as pressure-sensitive materials in tactile sensors to achieve tactile force detection.
Common piezoresistive materials can be prepared by mixing conductive substances into an insulating polymer, forming composite materials with pressure-sensitive characteristics. Conductive particles, conductive nanowires, and other conductive materials are distributed within the insulating polymer matrix. When pressure is applied, the distance between conductive materials decreases, increasing the conductive pathways, thereby reducing the overall resistance.
In 2012, Tee et al. from Stanford University in the USA mixed nickel particles with nanoscale structures with supramolecular polymers to create highly sensitive piezoresistive materials, which were used in the design of flexible electronic skin, demonstrating good contact force detection performance.
In 2014, Takei et al. from the University of California incorporated conductive CNTs (carbon nanotubes) and AgNPs (silver nanoparticles) into a polymer insulating matrix as sensitive materials for tactile sensing arrays. As shown in Figure 1, the resistance of the sensing array changes significantly when subjected to stretching, compression, and bending.
In addition to conductive polymers, metal films with piezoresistive effects have also been used in the design and manufacture of tactile sensing arrays.
In 2008, Kim et al. from Korea University designed a tactile sensing array with a PI (polyimide) substrate, where a nickel-chromium alloy was fabricated on the PI substrate. The resistance changes when deformed under force, allowing for tactile force measurement.
In 2016, Park et al. from Yonsei University in Korea created a tactile sensing array using MoS2 and graphene electrodes, achieving high detection sensitivity and excellent test repeatability. The use of metal films with piezoresistive effects as pressure-sensitive materials in tactile sensing arrays results in good dynamic performance and fast response speed.
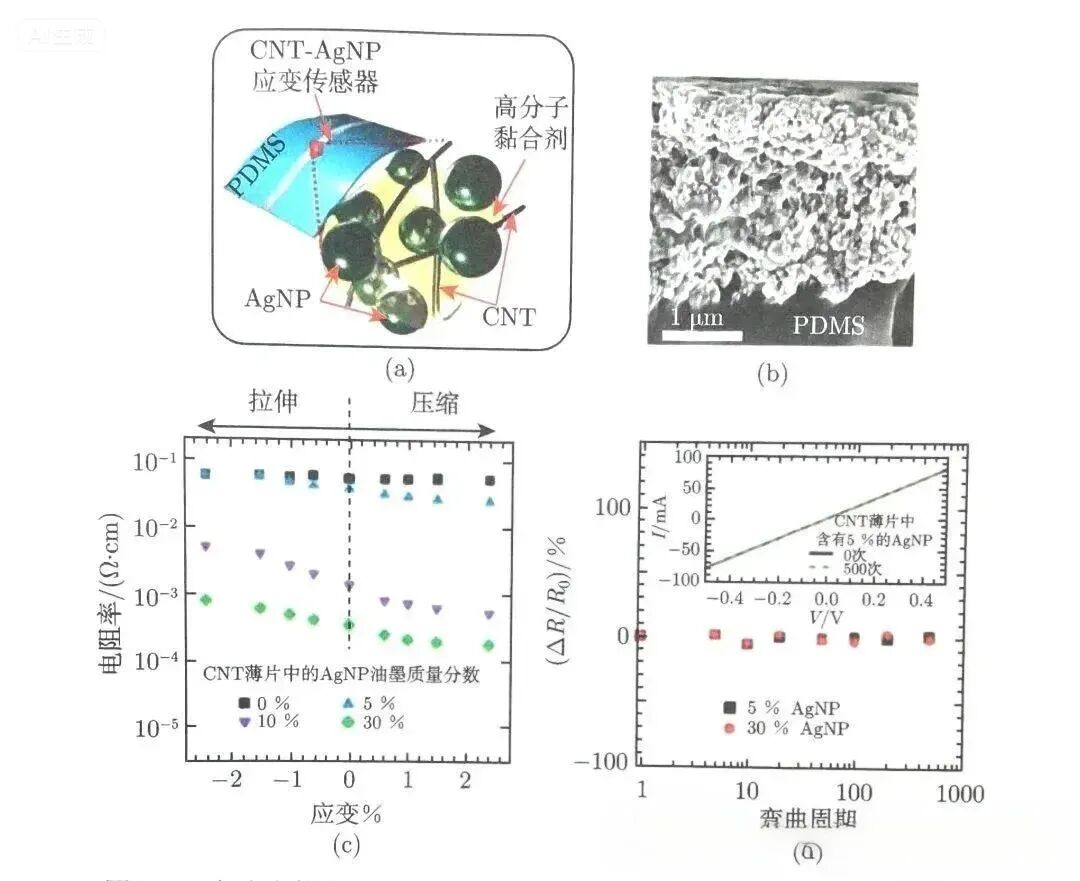
Figure 1: Conductive polymer made by incorporating carbon nanotubes and silver nanoparticles into a polymer.
PART.2
Piezoelectric Tactile Sensing
Piezoelectric materials generate electric charges when subjected to external pressure. By measuring the amount of charge generated, the applied external force can be detected. PVDF (polyvinylidene fluoride) exhibits piezoelectric properties after polarization treatment and can be used as a pressure-sensitive material in tactile sensors.
In 2006, Hosoda et al. from Osaka University in Japan randomly distributed PVDF films in a human-like finger. The contact between the finger and an object causes the PVDF film to generate charges, which can be converted into voltage to measure the contact force between the finger and the object.
In 2016, Li et al. from Sun Yat-sen University designed a planar piezoelectric film as the force-sensitive layer of a tactile sensing unit. As shown in Figure 2, when force is applied, charges are generated on the upper and lower surfaces of the piezoelectric film. The generated charges and voltage are amplified through a transistor, allowing for tactile force measurement.
In 2016, Yu Ping et al. from Zhejiang University integrated four PVDF films into each sensing unit of the tactile sensing array. When a three-dimensional force is applied to the sensing unit, the four PVDF films generate different amounts of charge, and the differences in charge can be used to decouple and calculate the three-dimensional force experienced by the tactile sensing unit.
For piezoelectric tactile sensing, the amount of charge generated by piezoelectric materials decreases over time, resulting in poor static detection performance for piezoelectric tactile sensors, but they are suitable for dynamic force detection.
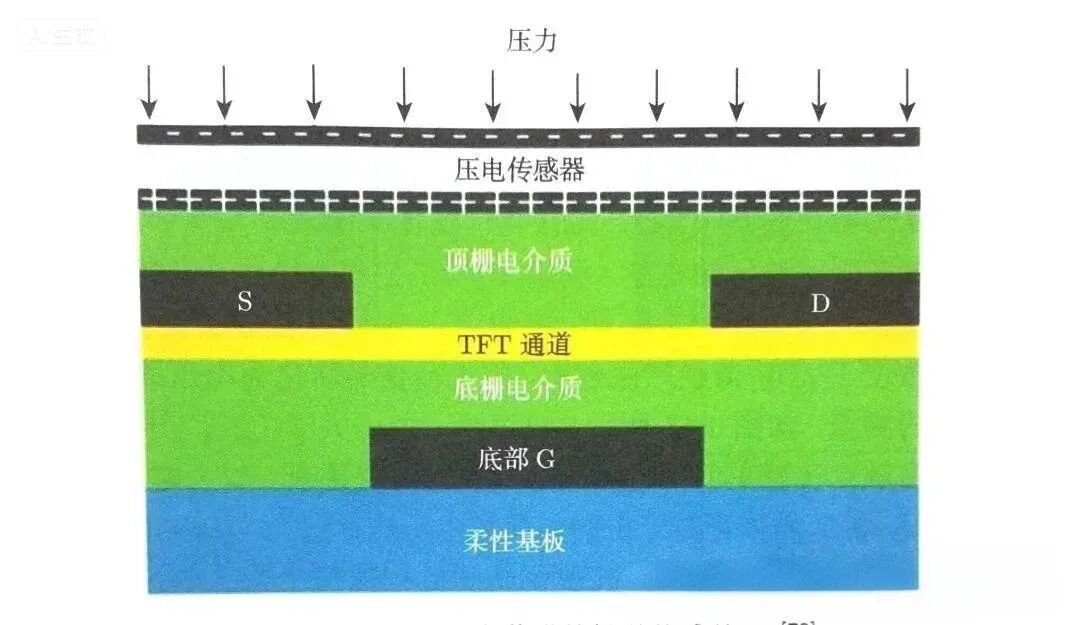
Figure 2: Tactile sensing unit based on piezoelectric film.
PART.3
Capacitive Tactile Sensing
A capacitor typically consists of two capacitor plates and a dielectric layer in between. Under external force, the dielectric layer is compressed, changing the distance between the capacitor plates and resulting in a change in capacitance.
Capacitive tactile sensing arrays using flat electrodes as capacitor plates have a simple structure, making it easy to measure normal tactile forces.
In 2008, Pritchard et al. from the University of Tennessee designed a layer of polystyrene between two flat electrodes as the dielectric layer, creating a 10×10 tactile sensing array. Under pressure, the polystyrene is compressed, increasing the capacitance to detect the magnitude of tactile force.
Zhang et al. from City University of Hong Kong designed a capacitive tactile sensing unit based on a PDMS dielectric layer and created a 3×3 sensing array, as shown in Figure 1.14. The various structures of the capacitive plates achieved good three-dimensional force detection performance.
In 2012, Takamatsu et al. from the National Institute of Advanced Industrial Science and Technology in Japan used nylon fibers coated with conductive ink to weave a mesh fabric, forming capacitors at the mesh nodes to detect distributed tactile forces. Capacitive tactile sensors can achieve high sensitivity in detecting contact forces and are easy to manufacture.
Researchers from the Italian Institute of Technology, Viry et al., used copper/tin-coated fabric as conductive plates and fluorosilicone sheets as dielectric layers to create flexible three-dimensional force sensors, embedded within a PDMS encapsulation layer. Their structural diagram and actual photos are shown in Figure 3. The researchers reflected the increase or decrease of normal force through the average capacitance change of the bottom quadrupole plates and calculated the magnitude of tangential force based on the difference in capacitance change between adjacent plates. Due to the low adhesion of the fluorosilicone sheet, a natural air layer of about 150μm thick is formed between the upper and lower plates; there are also certain gaps between the warp and weft of the conductive fabric, making the sensor very sensitive to small loads: when the external force is less than 32mN, its sensitivity can reach 14.22 N-1. However, due to the limitations of the reading system, the upper limit of the flexible three-dimensional force sensor is 12N.
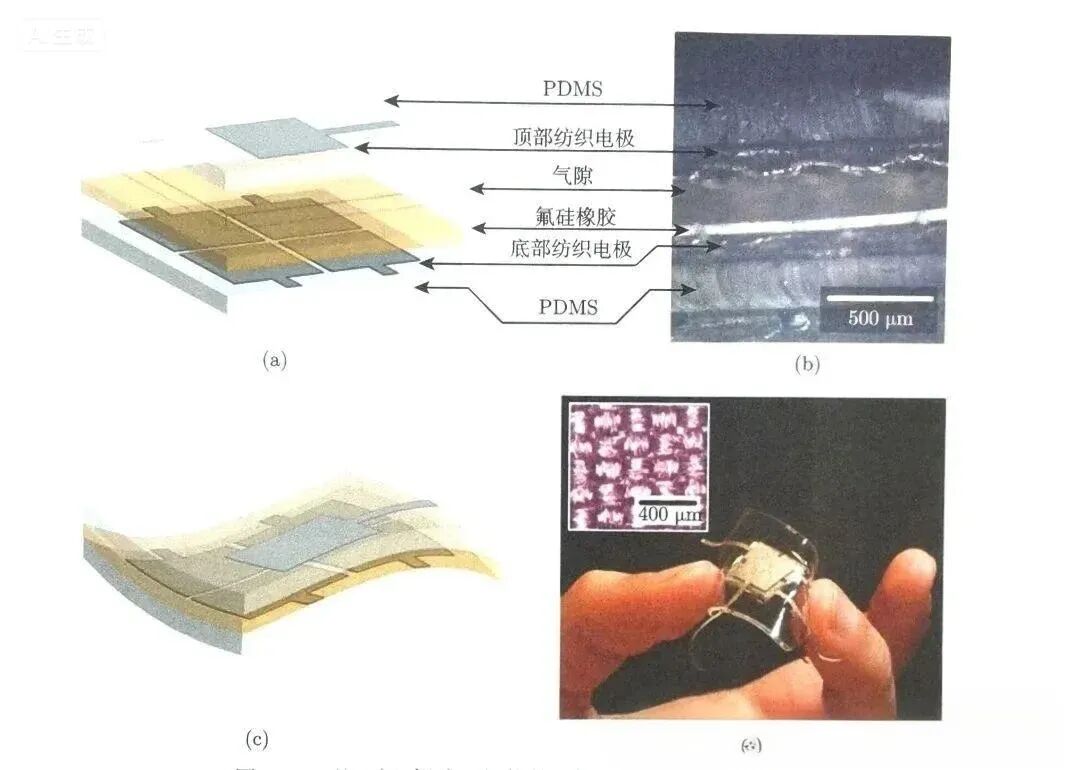
Figure 3: Flexible capacitive three-dimensional force sensor based on copper/tin-coated fabric.
PART.4
Fluidic Tactile Sensing
Fluidic tactile sensing can use conductive and non-conductive fluids. Researchers have designed linear, circular, and spiral microchannels filled with conductive fluid in tactile sensing arrays. When external force is applied, the microchannels are compressed and deformed, changing their length and cross-sectional area, which leads to changes in the resistance of the fluid within the microchannels, thus achieving tactile force detection.
In 2013, Roy et al. from the University of Southern California filled conductive fluid into mechanical fingertips. Under external force, the conductive fluid inside the fingertip is compressed, changing its resistance. By measuring the change in resistance, external force detection can be achieved, as shown in Figure 4.
In 2015, Chossat et al. from Carnegie Mellon University designed a mesh microchannel filled with conductive fluid in the tactile sensing array, leading out electrodes at the edges of the mesh. They used impedance imaging technology to decouple the forces acting on the mesh microchannels, successfully detecting the distribution of contact forces.
In terms of non-conductive fluid applications, in 2012, Ahmad Ridzuan et al. from Keio University in Japan filled insulating fluid into the dielectric layer of each sensing unit in the tactile sensing array. When the tactile sensing array is subjected to force, the dielectric layer is compressed, resulting in a change in capacitance. Since the dielectric layer is filled with fluid, the sensing array has high flexibility. However, using fluid as the pressure-sensitive element in tactile sensing arrays carries the risk of fluid leakage.
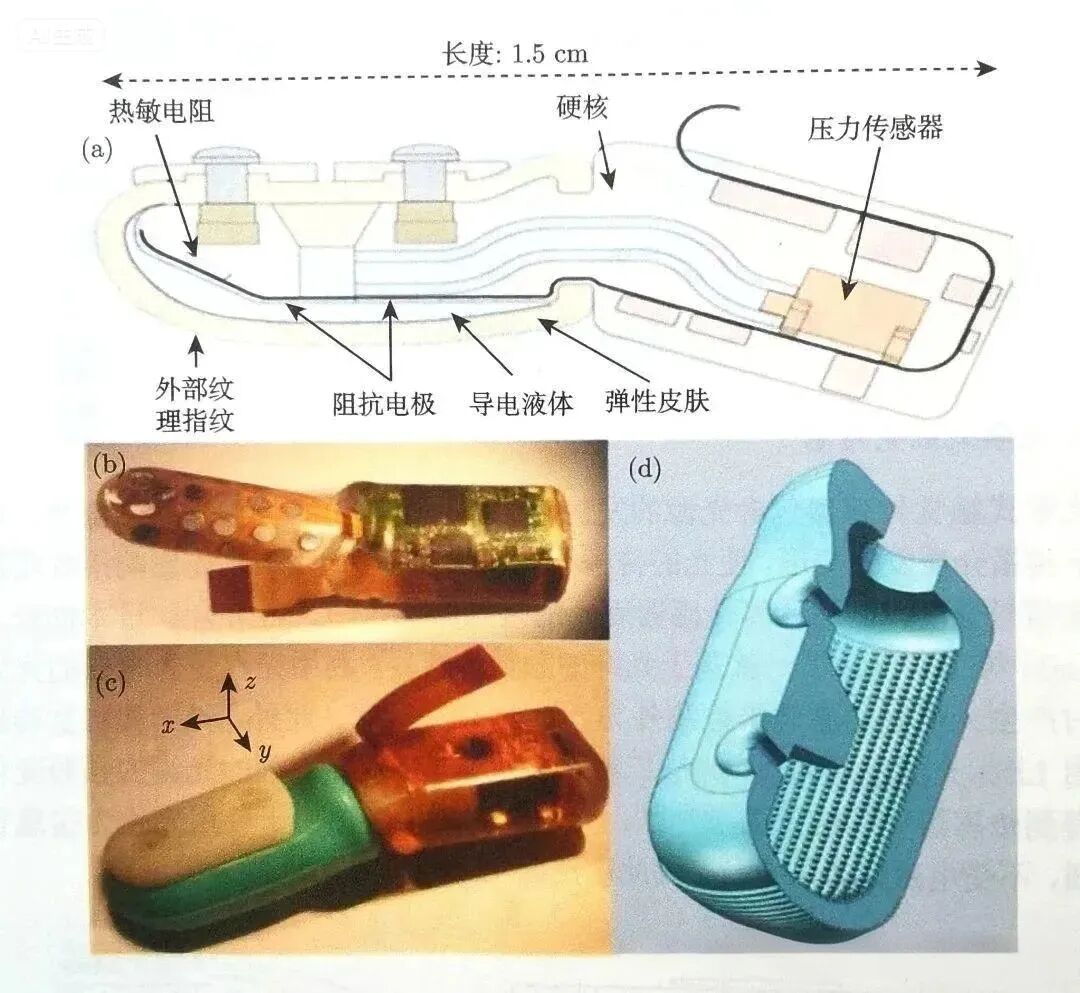
Figure 4: Mechanical fingertip integrated with fluidic tactile sensor.
PART.5
Optical Tactile Sensing
Optical tactile sensors consist of a light source emitter, a receiver, and a medium for light propagation. Under external force, the propagation medium deforms, changing the direction and intensity of light propagation, which affects the intensity of the light signal received by the receiver, allowing for the calculation of the contact force experienced by the sensor.
In 2016, Yamazaki et al. from Soka University in Japan designed a fiber-optic-based tactile sensor that detects external forces by utilizing the principle of light leakage that occurs when light propagates through a bent optical fiber, as shown in Figure 5.
Additionally, optical tactile sensors often use LED light sources to emit light, with photodiodes receiving the light. The changes in the intensity of the received light can be used to calculate the external force experienced by the sensor. Due to the use of light as the medium for information transmission, optical tactile sensors are not affected by electromagnetic interference, making them widely used in the field of surgical robotics.
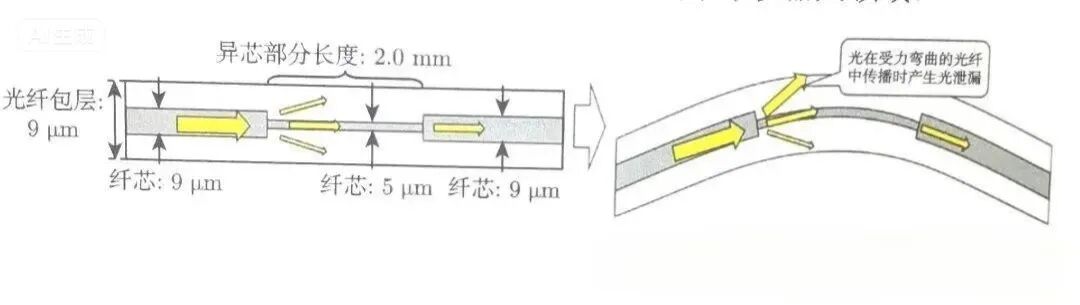
Figure 5: Working principle of a fiber-optic tactile sensor.
PART.6
Transistor-based Tactile Sensing
Transistors in tactile sensors amplify the electrical signals from tactile-sensitive elements, enhancing the signal-to-noise ratio of the sensor. Organic field-effect transistors, due to their high flexibility, integrate well with flexible tactile sensors, making them widely adopted by researchers.
In 2016, Spanu et al. from the University of Cagliari in Italy manufactured organic field-effect transistors on the piezoelectric film sensitive elements of tactile sensing units to amplify and measure the charge signals from the piezoelectric film, achieving tactile force detection, as shown in Figure 6.
In 2010, Kuniharu Takei et al. from the University of California, Berkeley, covered a nanowire organic field-effect transistor array with a conductive rubber layer, creating an active tactile sensing array that utilizes the signal amplification effect of active transistors to improve the detection sensitivity of the tactile sensing array, as shown in Figure 7.
The integration of transistors into tactile sensing arrays allows for some signal processing circuits to be designed directly on the tactile sensing array, enhancing its “intelligence” and significantly reducing the complexity of peripheral circuits. However, the downside is that the sensor structure is complex, the manufacturing process is cumbersome, and the cost is high.
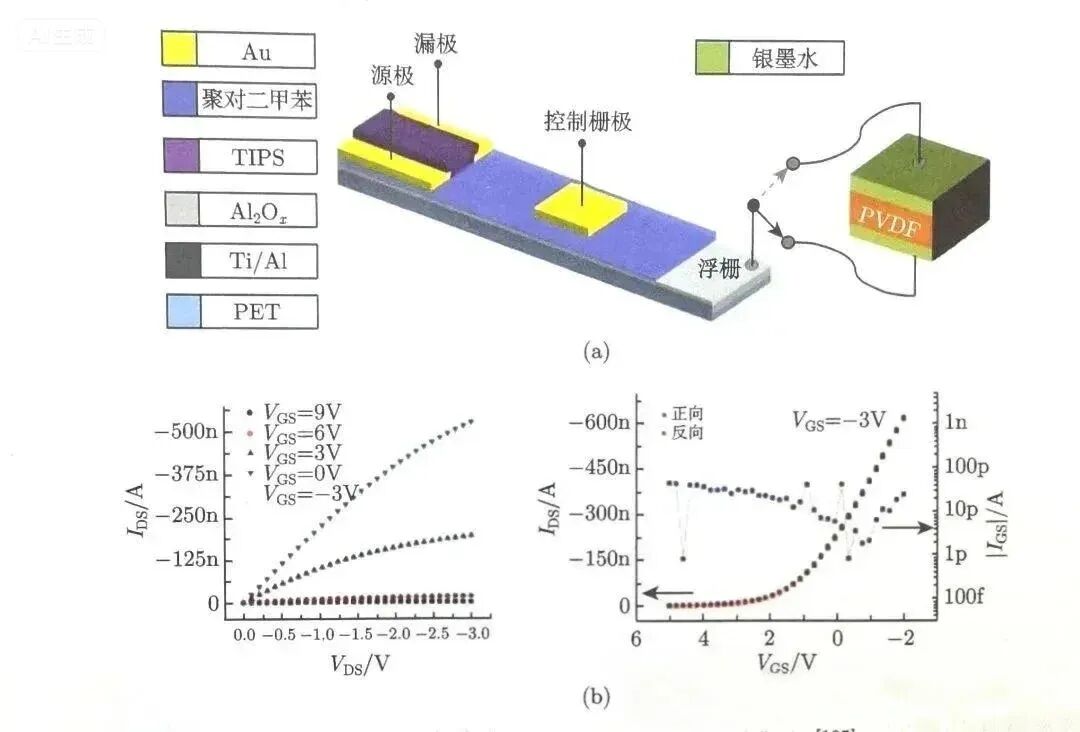
Figure 6: Integration of piezoelectric film and organic field-effect transistor.
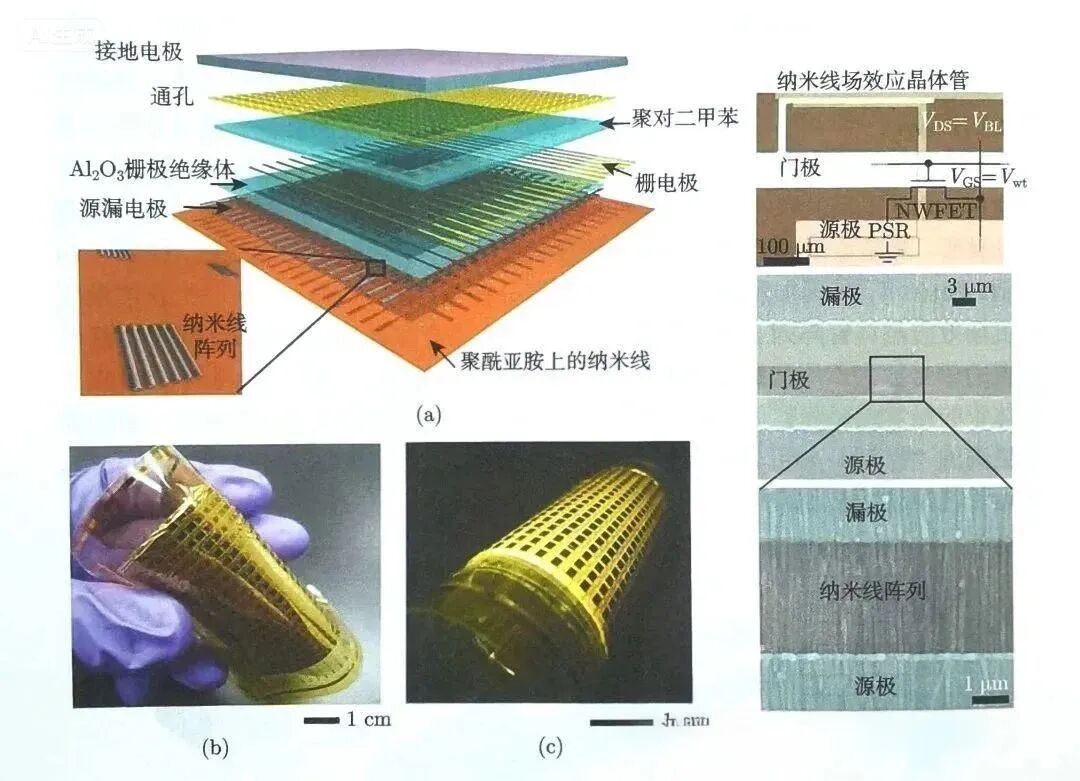
Figure 7: Integration of conductive rubber and organic field-effect transistor.
PART.7
Other Types of Tactile Sensing
In addition to the aforementioned tactile sensing methods, there are also tactile sensing methods based on ferroelectric effects, acoustic waves, electric fields, and magnetic fields.
Zhao et al. from Cornell University in the USA created a highly elastic waveguide tube using transparent polyurethane rubber as the core and a highly light-absorbing polysiloxane composite material as the covering layer. Based on the principle that light power in the waveguide tube is negatively correlated with propagation distance, the researchers placed LEDs and photodiodes at both ends of the waveguide tube to enable it to respond to tensile strain, bending curvature, and external loads. In force measurement experiments, the researchers found that when the area of force application is less than 6mm2, the waveguide sensor exhibits both high linearity and sensitivity. Subsequently, Zhao et al. integrated three waveguide tubes into a hollow silicone rubber finger actuator, creating a smart prosthetic hand based on this. Subsequent experiments demonstrated that the prosthetic hand could recognize the shape, material, and hardness of objects.
Ho et al. from Sungkyunkwan University in Korea developed a multi-modal flexible transparent electronic skin using graphene and its derivatives. This electronic skin consists of 6×6 sensor unit groups, each containing an impedance-type humidity sensor based on graphene oxide, a capacitive pressure sensor with PDMS as the dielectric layer, and a resistive temperature sensor based on reduced graphene oxide. By setting the characterization method of the pressure sensor to the change in capacitance, the outputs of the three types of sensors do not interfere with each other. Subsequent experiments involving hot air blowing, single/double finger pressing, and exhalation demonstrated that this electronic skin can simultaneously detect physical quantities such as temperature, humidity, and pressure.
END
Editor: Yu Zihan
Editor-in-Chief: Wu Yongjiang
Reviewer: Li Yang
Article/Image Source: Sensor Expert Network/Flexible Electronics and Sensors (original title: Main Technical Approaches of Flexible Tactile Sensors)
Disclaimer: If there are any copyright issues, please contact us in a timely manner. The copyright interpretation belongs to the original author. This article is recommended for reading by China Investment and Financing!