The term “robot” originates from the 1920 play “R.U.R.” (Rossum’s Universal Robots) by Czech writer Karel Čapek, meaning “forced labor.” Today, it has transitioned from science fiction into reality, profoundly changing our modes of production and lifestyle. The history of robot development is a technological epic of humanity combining imagination, engineering, and artificial intelligence.
I. Historical Evolution: Four Key Stages
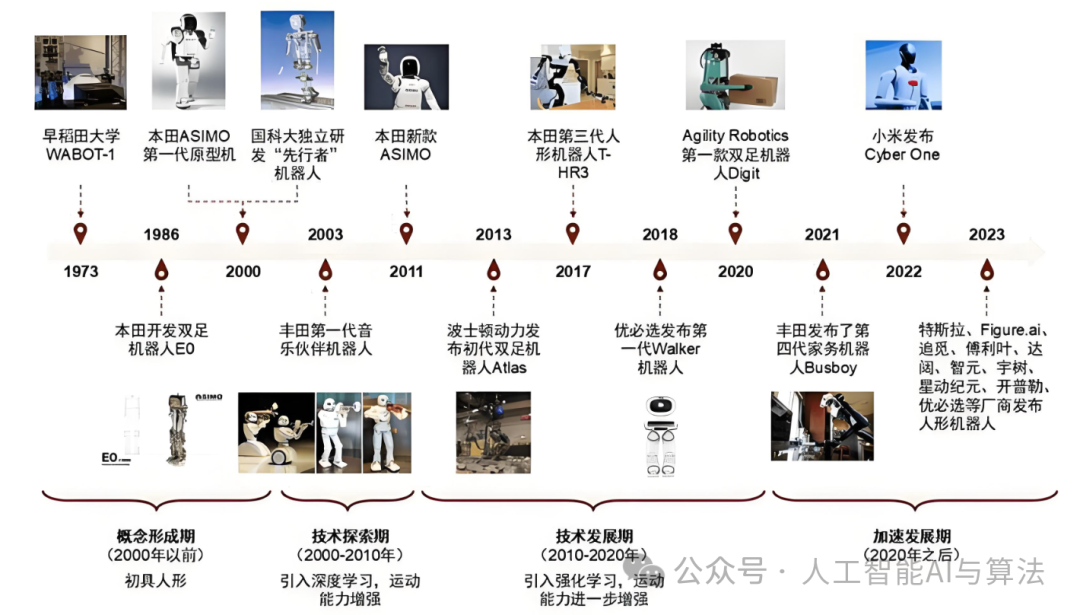
The development of robots has not been a sudden occurrence but rather a long evolution from mechanical automation to intelligent autonomy.
1. Early Beginnings and Ancient Fantasies (Before 1950s)
Before the concept of “robot” emerged, humanity’s pursuit of automated machinery had already begun.
-
Technological Prototypes: The automatic temple doors and pneumatic devices invented by the ancient Greek mathematician Hero; the ancient Chinese guide car and the drum car; the mechanical dolls created by Swiss clockmakers Jacques de Vaucanson and his son in the 18th century that could write and play the piano. These devices relied on intricate gears, springs, and cams, marking the beginning of program control.
-
Core Drive: Purely mechanical structures with no electronic or software control.
2. The Birth of Industrial Robots and Teaching Reproduction (1950s-1970s)
This marks the starting point of modern robotics, driven primarily by the demand for industrial automation.
-
Milestone Events:
-
1954: George Devol invented the first programmable industrial robot and applied for a patent.
-
1959: Devol and Joseph Engelberger co-founded Unimation, producing the world’s first industrial robot, Unimate. It was used on General Motors’ die-casting production line to perform hazardous tasks such as extracting and stacking hot metal parts.
-
Working Mode: Teaching Reproduction. Workers manually guide the robot’s mechanical arm to complete a task path, and the robot controller records the motion trajectories and positions of each joint, allowing it to accurately repeat the action.
-
Core Technology: Servo control, programmable logic controllers (PLC), hydraulic/electric drives.
3. Integration of Perception Capabilities and Flexible Automation (1970s-2000s)
With the development of computer and sensor technologies, robots began to possess “senses” and could respond to their environment.
-
Technological Breakthroughs:
-
Sensor Integration: Force sensors, visual sensors (cameras), laser rangefinders, etc., were introduced. For example, in 1973, a robot system with visual feedback made its debut.
-
Commercial Popularization: Companies like Fanuc, KUKA, and ABB launched numerous electric-driven industrial robots, widely used in welding, painting, assembly, and other fields.
-
Working Mode: Perception-Action Loop. Robots can adjust their actions in real-time based on sensor feedback. For instance, they can visually identify deviations in the position of parts and compensate accordingly.
-
Core Technology: Microprocessors, various sensor technologies, and preliminary path planning algorithms.
4. The Intelligent Era and Autonomous Systems (2000s-Present)
The explosion of the internet, big data, and artificial intelligence (especially deep learning) has propelled robots to a new height of “intelligence.”
-
Technological Features:
-
Cognition and Decision-Making: Robots are no longer just tools for executing repetitive tasks; they can understand complex instructions, navigate autonomously, and even collaborate with humans.
-
Human-Robot Collaboration: The emergence of “collaborative robots” that are lightweight and low-power, allowing them to work alongside humans in the same space without safety barriers.
-
Beyond the Factory: The application scenarios for robots have greatly expanded, including surgical robots, warehouse logistics robots, autonomous vehicles, drones, and home service robots.
-
Core Technology: Artificial intelligence, deep learning, SLAM, cloud computing, 5G communication.
II. In-Depth Analysis of Core Technologies
Modern robots are complex multi-technology integrated systems, which can be broken down into the following components:
1. Perception Technology – The “Senses” of Robots This is the foundation for robots to understand the world.
-
Vision: 2D/3D cameras, LiDAR, depth cameras, stereo vision systems. The core technology is computer vision, including image recognition, object detection and tracking, and 3D reconstruction. Deep learning (such as CNN) has greatly improved the accuracy and robustness of visual recognition.
-
Force/Tactile: Six-dimensional force/torque sensors enable robots to perceive the forces and torques applied to the end effector, achieving precise assembly, polishing, and other “compliant control” tasks.
-
Position and Orientation: Encoders (measuring joint angles), inertial measurement units, GPS, etc., are used to determine the position of the robot and external objects.
2. Decision-Making Technology – The “Brain” of Robots This reflects the intelligence level of robots.
-
Environment Modeling and SLAM: Simultaneous Localization and Mapping is a core technology for mobile robots. It allows robots to build a map of their surroundings in real-time using sensor data while simultaneously determining their position on the map.
-
Path Planning: Based on known environmental maps, it calculates the optimal or collision-free path from the starting point to the endpoint. Common algorithms include A*, D*, and Rapidly-exploring Random Trees.
-
Task Planning and AI: High-level decision-making that breaks down complex tasks into a series of executable sub-tasks. This relies on knowledge representation, reasoning, and machine learning. For example, a home service robot needs to understand the instruction “bring me a bottle of cola” and plan a series of actions such as “go to the kitchen – find the refrigerator – open the refrigerator door – identify the cola – grab – return.”
3. Control Technology – The “Nerves and Muscles” of Robots Responsible for precisely executing the commands issued by the brain.
-
Motion Control: Includes position control, speed control, and force control. The core is dynamics modeling and control algorithms (such as PID control, computed torque control, adaptive control). It needs to address issues like multi-joint coordinated motion and dynamic balance (e.g., humanoid robots).
-
Drive Systems: Convert electrical signals into physical motion. They mainly include:
-
Motor Drives: AC servo motors, DC motors, stepper motors, characterized by high precision and rapid response.
-
Hydraulic Drives: Output significant force, commonly used in heavy machinery, excavators, etc.
-
Pneumatic Drives: Clean and fast, but with lower control precision, often used for simple grasping and pushing tasks.
-
Actuators: The “hands” of robots, i.e., end effectors such as grippers, suction cups, welding guns, spray guns, etc.
4. Body Structure – The “Body” of Robots The mechanical structure of robots determines their workspace and capabilities.
-
Configuration:
-
Serial Robots: Such as common multi-joint robotic arms, which have high flexibility and large workspaces.
-
Parallel Robots: Such as Delta robots, which have stable structures, strong load capacities, and extremely fast speeds, commonly used in sorting and packaging.
-
Mobile Chassis: Wheeled, tracked, or legged (bipedal/quadrupedal). Legged robots (like Boston Dynamics’ Atlas and Spot) have unique advantages on unstructured terrain.
III. Future Prospects and Challenges
Robot technology is evolving towards higher degrees of autonomy, adaptability, interactivity, and collaborative teamwork.
-
Technological Trends:
-
AI Large Models and Embodied Intelligence: Combining large language models with robots enables them to understand more abstract human instructions and possess common-sense reasoning capabilities.
-
Bionic Robots: Mimicking biological structures and movements to cope with more complex environments.
-
Soft Robots: Made from flexible materials, they are highly safe and can adapt to various irregular objects, showing great potential in medical and rescue fields.
-
Robot Cloud Brain: By utilizing 5G/6G, the “brain” of robots can be placed in the cloud, achieving resource sharing, knowledge exchange, and collaborative learning.
-
Challenges Faced:
-
Technical Aspects: Reliable perception and decision-making in unstructured environments, precise dexterous operations, and long-lasting energy supply issues.
-
Social Aspects: Safety and ethical standards for human-robot collaboration, data privacy, changes in employment structures, and the formulation of related laws and regulations.
Conclusion
From the first roar of Unimate on the production line to Atlas’s backflip on complex terrain, robot technology has traversed a glorious path from “mechanical arms” to “intelligent agents.” It is not only an extension of automation tools but also a great attempt by humanity to explore its own intelligence and expand its capabilities. As perception, decision-making, and control technologies continue to integrate and break through, future robots will undoubtedly become more deeply integrated into human society, becoming our indispensable partners and helpers.