Combining living cell components with a three-dimensional scaffold can be used to develop robots carrying biological tissues. Existing research indicates that this type of robot can possess certain perception and environmental adaptation capabilities. Recently, a joint research team from University of Illinois at Urbana-Champaign led by Professors Mattia Gazzola and Rashid Bashir and John A. Rogers from Northwestern University published a research paper titled “Remote control of muscle-driven miniature robots with battery-free wireless optoelectronics” in Science Robotics, introducing a biologically hybrid robot (eBiobot) that can be remotely controlled without a battery. The robot consists of three parts: a wirelessly powered light-emitting diode (LED), a 3D-printed hydrogel scaffold, and muscle actuators. The muscle actuators mainly include optogenetically modified muscle cells and extracellular matrix. The LED array can periodically flash under the power supply and remote control of external devices, stimulating the muscle actuators to repeatedly contract and relax naturally. The designed asymmetric hydrogel scaffold structure allows the actuator’s reciprocating motion to drive the robot to crawl forward.
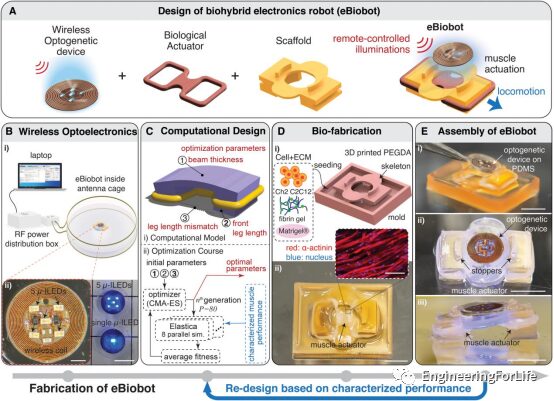 Figure 1: Basic structure and manufacturing process of the miniature robot
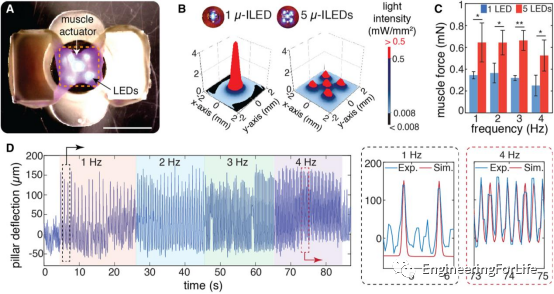
To more effectively stimulate muscle cells, the authors used an array of five micro inorganic light-emitting diodes (μ-ILEDs). Compared to a single LED, this can produce stimulation more efficiently over a larger area, inducing greater muscle contraction force. The size of the robot’s scaffold is approximately 1.4×0.7 cm, and the muscle actuators can generate about 0.6 mN of driving force.
Figure 2: Performance characterization of light-stimulated muscle actuators
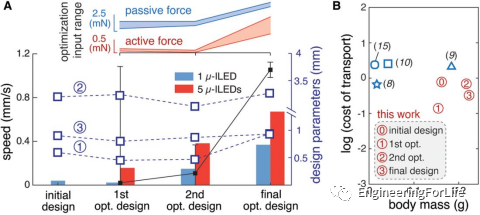
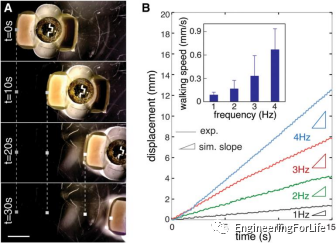
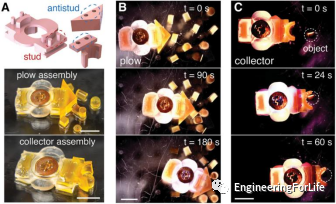
The structural dimensions of the hydrogel scaffold greatly influence the robot’s motion performance. The authors selected the thickness of the robot’s middle beam, the length of the front legs, and the difference in length between the front and rear legs, combining simulation analysis and experimental data to iteratively optimize these three parameters with the goal of enhancing crawling speed. Ultimately, the robot can move at a maximum speed of 0.83 mm/s under a driving frequency of 4 Hz, a pulse width of 50 ms, and wireless power of 10 W. It can also move or collect small objects on a plane when equipped with different attachments.
Figure 3: Design iteration of the electronic biological robot
Figure 4: Motion performance of the robot
Figure 5: Demonstration of the robot’s functions
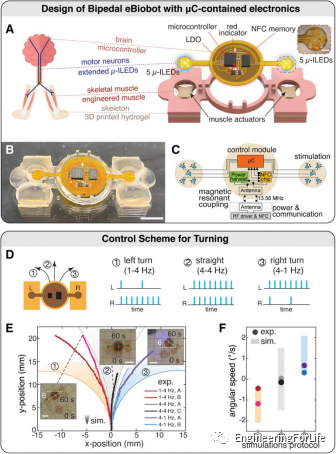
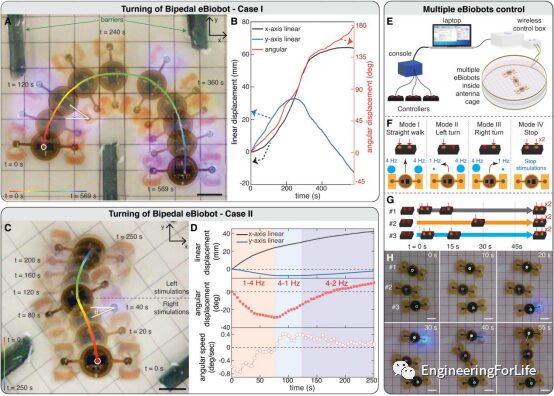
The aforementioned structure of the miniature robot can only achieve unidirectional crawling. Inspired by bipedal structures, the authors combined two muscle actuators and added a microcontroller to drive the left and right components separately. In addition, the robot is also equipped with a near-field communication (NFC) chip, allowing for real-time remote control of multiple robots. When applying stimuli of 1-4 Hz, 4-4 Hz, and 4-1 Hz to the left and right actuators, the robot can turn left, move straight, and turn right. The researchers demonstrated the robot overcoming obstacles, turning left and right, and three robots arranged in an “I” shape to showcase their functionality.
Figure 6: Structural design and performance demonstration of the bipedal electronic biological robot
Figure 7: Steering motion control and multi-robot control of the bipedal electronic biological robot
The researchers combined biological muscle actuators, electronic components, and hydrogel scaffolds to form electronic biological robots and demonstrated their motion and control capabilities. Due to the limitations of muscle tissue, this robot can currently only operate in a glucose-rich liquid environment at 37°C. Improving actuator performance and reducing external environmental requirements are potential future research directions.
https://www.science.org/doi/10.1126/scirobotics.add1053
Figure 1: Basic structure and manufacturing process of the miniature robot
To more effectively stimulate muscle cells, the authors used an array of five micro inorganic light-emitting diodes (μ-ILEDs). Compared to a single LED, this can produce stimulation more efficiently over a larger area, inducing greater muscle contraction force. The size of the robot’s scaffold is approximately 1.4×0.7 cm, and the muscle actuators can generate about 0.6 mN of driving force.
Figure 2: Performance characterization of light-stimulated muscle actuators
The structural dimensions of the hydrogel scaffold greatly influence the robot’s motion performance. The authors selected the thickness of the robot’s middle beam, the length of the front legs, and the difference in length between the front and rear legs, combining simulation analysis and experimental data to iteratively optimize these three parameters with the goal of enhancing crawling speed. Ultimately, the robot can move at a maximum speed of 0.83 mm/s under a driving frequency of 4 Hz, a pulse width of 50 ms, and wireless power of 10 W. It can also move or collect small objects on a plane when equipped with different attachments.
Figure 3: Design iteration of the electronic biological robot
Figure 4: Motion performance of the robot
Figure 5: Demonstration of the robot’s functions
The aforementioned structure of the miniature robot can only achieve unidirectional crawling. Inspired by bipedal structures, the authors combined two muscle actuators and added a microcontroller to drive the left and right components separately. In addition, the robot is also equipped with a near-field communication (NFC) chip, allowing for real-time remote control of multiple robots. When applying stimuli of 1-4 Hz, 4-4 Hz, and 4-1 Hz to the left and right actuators, the robot can turn left, move straight, and turn right. The researchers demonstrated the robot overcoming obstacles, turning left and right, and three robots arranged in an “I” shape to showcase their functionality.
Figure 6: Structural design and performance demonstration of the bipedal electronic biological robot
Figure 7: Steering motion control and multi-robot control of the bipedal electronic biological robot
The researchers combined biological muscle actuators, electronic components, and hydrogel scaffolds to form electronic biological robots and demonstrated their motion and control capabilities. Due to the limitations of muscle tissue, this robot can currently only operate in a glucose-rich liquid environment at 37°C. Improving actuator performance and reducing external environmental requirements are potential future research directions.
https://www.science.org/doi/10.1126/scirobotics.add1053
Regarding regenerative medicine, EFL has established “Academic Exchange Group” and “Industry Exchange Group“. Scan the QR code below to add the editor on WeChat and join the discussion~