|
Click Jiangsu Laser Industry Technology Innovation Strategic Alliance Follow/ Pin Public Account |
|
News | Technical Article | Conference Forum | Processing Services |

Jiangsu Laser Alliance Introduction:
The microrobotic system includes unconfined rolling magnetic microrobots, two-degree-of-freedom rotating permanent magnets, and ultrasound imaging systems, which have been developed for both in vitro and in vivo biomedical applications. Engineers from Purdue University demonstrated a rectangular robot, only a few human hairs in size, that can traverse the colon by performing backflips in live animal models. This research is published in the journal Micromachines, marking the first demonstration of microrobots rolling through biological systems in vivo. Due to its small size, the microrobot cannot carry a battery; instead, it is powered by a magnetic field and wirelessly controlled from the outside.
Recent advancements in the design and manufacturing of microrobots have made them increasingly viable for biomedical applications. Their small size provides the potential for minimally invasive access to many areas within the human body. Additionally, they can be wirelessly controlled and directed towards target locations within the body to perform various tasks. Compared to traditional surgical techniques and drug delivery methods, the use of actively guided microrobots is expected to reduce patient trauma, lower the risk of side effects, and achieve a higher drug retention rate.
Potential biomedical applications of microrobots include microsurgery, tumor imaging and ablation, tissue biopsy, targeted drug delivery, cell delivery, and gene silencing, demonstrating the viability of microrobots under both in vitro and in vivo conditions. Colloidal microrobots with cell membrane coatings have shown biocompatibility and can move in response to external triggers, such as previously demonstrated studies using ultrasound-triggered microcapsules to open in live mice, acid-driven microrobots effectively pressing drug payloads directly against the stomach wall of live mice, and tetherless microgrippers capturing live fibroblast clusters in vitro, as well as performing in vivo biopsies on porcine bile ducts. High-speed ultrasound-driven microscopic “bullets” (microswimmers

 ) are capable of penetrating, deforming, and cutting deep tissues both in vivo and in vitro. Although these results are promising, transitioning microrobots from laboratory environments to clinical settings remains a daunting task.
) are capable of penetrating, deforming, and cutting deep tissues both in vivo and in vitro. Although these results are promising, transitioning microrobots from laboratory environments to clinical settings remains a daunting task.
A key challenge in using microrobots in vivo is the difficulty of real-time spatial localization in the presence of visual obstructions. Microrobots are too small to provide onboard power or perform computations; they cannot autonomously broadcast or determine their location. Therefore, external imaging tools are essential for the localization of microrobots. Imaging methods using visible light are not suitable for minimally invasive surgeries where tissue obstructs the line of sight. Therefore, alternative methods capable of penetrating tissue are needed. Such methods include optical fluorescence imaging, X-ray analysis, ultrasound imaging, and magnetic resonance imaging (MRI). Potential issues with these methods arise from poor spatial and temporal resolution, cumbersome equipment, and adverse interactions between microrobot imaging and actuation methods. For instance, it is challenging to use magnetic drive and MRI imaging simultaneously due to phenomena such as magnetic field distortions caused by interactions between multiple magnetic field sources. It may also be impractical to assemble certain imaging and actuation systems within the clinical workspace. An imaging/actuation combination with high resolution, cross-compatibility, small footprint, and tissue penetration capability is essential for the feasibility of actively guided, minimally invasive microrobots in vivo. Combining high-frequency ultrasound imaging (> 10 MHz) with magnetic drive to locate rolling magnetic microrobots can explore the previously described biomedical applications.
Researchers employed a novel two-degree-of-freedom rotating permanent magnet system as a source of time-varying external magnetic fields for wireless control and propulsion. Two different material versions of the microrobots were studied. According to cytotoxicity tests, the toxic effects of the microrobots’ constituent materials on mouse fibroblasts showed no statistical difference from negative controls. Two-dimensional motion of the microrobots was observed in agar blocks (in vitro), inside porcine colon (ex vivo), euthanized mouse colon (in situ), and live mouse colon (in vivo). This article focuses on the development of a microrobotic system composed of high-frequency ultrasound imaging, magnetic drive, and rolling magnetic microrobots, providing prospects for various minimally invasive in vivo biomedical applications.
▲ The ultrasound lens shows the microrobots rolling through the colon in vivo
The rolling microrobots consist of an 800μm×400μm×100μm polymer block embedded with magnetic neodymium-iron-boron (NdFeB) microparticles (shown in Figure A). Due to the difference in magnetic polarization between the microrobots and the externally varying magnetic fields, a magnetic torque is applied to the microrobots, resulting in net forward rolling motion.
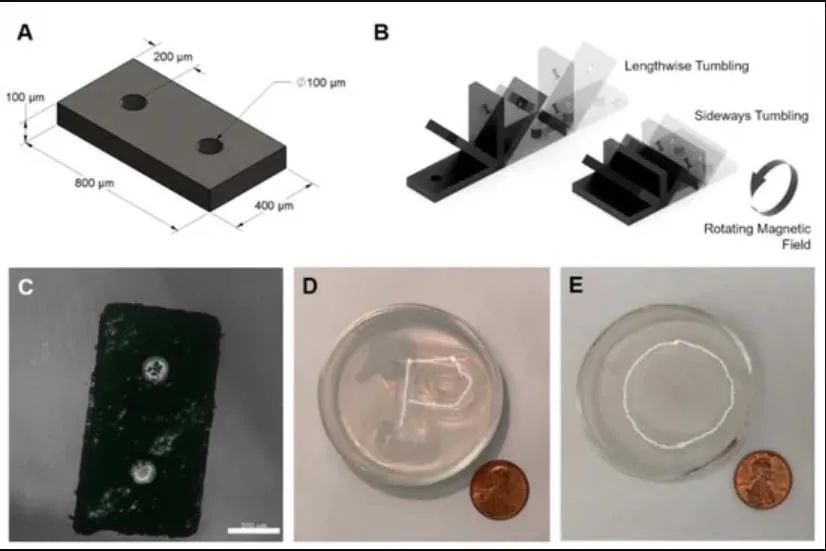
Due to the magnetic torque from the rotating magnets, the microrobots roll in a net forward motion. By rotating the axis of the magnets, two-dimensional directional control can be achieved, and the microrobots can be manipulated along various trajectories, including circular and P-shaped paths. The microrobots can move in vitro, in situ, and in vivo conditions, as well as in ex vivo conditions within the porcine colon, across unstructured terrains in the mouse colon. High-frequency ultrasound imaging can determine the location of the microrobots in real-time when optical obstruction by animal tissue occurs. When coated with a fluorescent payload, the microrobots showed the release of most of the payload within one hour in phosphate-buffered saline.

The microrobots can be seen to the right of the “U” on this U.S. cent coin. Image source: Purdue University
3D printed colloidal particle-sized microswimmers
A brand new magnetically driven high-speed soft robot has been developed, capable of ultra-fast walking, swimming, and more.
This article is sourced from: Elizabeth E. Niedert et al, A Tumbling Magnetic Microrobot System for Biomedical Applications, Micromachines (2020). DOI: 10.3390/mi11090861

▼Jiangsu Laser Industry Technology Innovation Strategic Alliance Meeting Notice▼

 For the original text you can click the bottom to read the original text and log in to the Jiangsu Alliance website to register for download or contact us through the WeChat backend
For the original text you can click the bottom to read the original text and log in to the Jiangsu Alliance website to register for download or contact us through the WeChat backend
Contact: 18914010962, 18913557664 (same number for WeChat)
Website: www.laserjs.cn
WeChat ID: Jiangsu Laser Industry Technology Innovation Strategic Alliance
English ID: laserjs
