 Humanoid robots, also known as bionic robots, are designed to mimic the human form. In addition to having a human-like appearance and simulating human movements, they also possess intelligence and interactivity. The core technology modules of humanoid robots include environmental perception modules, motion control modules, and human-machine interaction modules.
Humanoid robots, also known as bionic robots, are designed to mimic the human form. In addition to having a human-like appearance and simulating human movements, they also possess intelligence and interactivity. The core technology modules of humanoid robots include environmental perception modules, motion control modules, and human-machine interaction modules.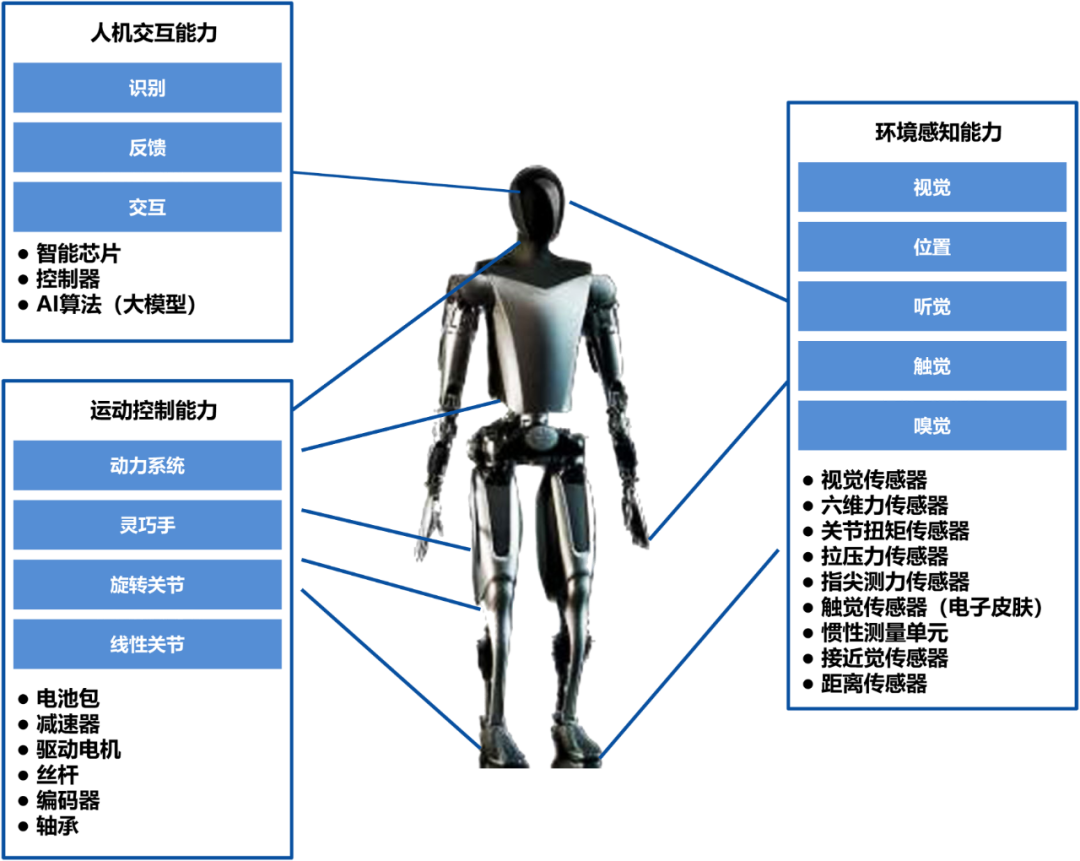 ▲Core modules of humanoid robotsCompared to robots designed for single tasks, humanoid robots can quickly switch between different scenarios, offering high versatility and flexibility, enabling them to perform various types of tasks, thus having broader commercial application prospects. Moreover, compared to other forms of robots, humanoid robots can better adapt to various infrastructures designed according to human physical characteristics and operational habits, without the need for large-scale modifications to existing environments and facilities.
▲Core modules of humanoid robotsCompared to robots designed for single tasks, humanoid robots can quickly switch between different scenarios, offering high versatility and flexibility, enabling them to perform various types of tasks, thus having broader commercial application prospects. Moreover, compared to other forms of robots, humanoid robots can better adapt to various infrastructures designed according to human physical characteristics and operational habits, without the need for large-scale modifications to existing environments and facilities. ▲Various humanoid robot products have been launched (Source: Company materials)Currently, humanoid robots are on the brink of commercial explosion, with widespread belief that the market size could reach hundreds of billions of dollars by 2030. Markets and Markets predicts that the global humanoid robot market size will increase from $1.8 billion in 2023 to $13.8 billion in 2028, with a compound annual growth rate (CAGR) of approximately 50.2%. According to Goldman Sachs, in an optimistic scenario, the market size could reach $154 billion by 2035, equivalent to one-third of the market size of electric vehicles or smartphones in 2021. The “Humanoid Robot Industry Research Report” released at the first China Humanoid Robot Industry Conference in April 2024 predicts that the market size of humanoid robots in China will reach approximately 2.76 billion yuan in 2024, 10.471 billion yuan in 2026, and 75 billion yuan in 2029, accounting for 32.7% of the global total, ranking first in the world, and is expected to reach a scale of 300 billion yuan by 2035.
▲Various humanoid robot products have been launched (Source: Company materials)Currently, humanoid robots are on the brink of commercial explosion, with widespread belief that the market size could reach hundreds of billions of dollars by 2030. Markets and Markets predicts that the global humanoid robot market size will increase from $1.8 billion in 2023 to $13.8 billion in 2028, with a compound annual growth rate (CAGR) of approximately 50.2%. According to Goldman Sachs, in an optimistic scenario, the market size could reach $154 billion by 2035, equivalent to one-third of the market size of electric vehicles or smartphones in 2021. The “Humanoid Robot Industry Research Report” released at the first China Humanoid Robot Industry Conference in April 2024 predicts that the market size of humanoid robots in China will reach approximately 2.76 billion yuan in 2024, 10.471 billion yuan in 2026, and 75 billion yuan in 2029, accounting for 32.7% of the global total, ranking first in the world, and is expected to reach a scale of 300 billion yuan by 2035.
1Dexterous Hands: The Core Component of Humanoid Robot Interaction
The dexterous human hand is an indispensable part of life, capable of grasping various objects in different postures and performing specific, complex tasks through precise operations. Similarly, the dexterous hand of a robot is also an important component of robot design and operation, serving as a crucial means for achieving fine local operations. ▲Examples of humanoid robot dexterous hands (Source: Company materials)The dexterous hand is an important end effector of humanoid robots. The end effector is directly mounted on the robot’s wrist and is used to grasp workpieces or allow tools to complete tasks according to specified programs. Compared to ordinary industrial robotic hands (which have fewer degrees of freedom, simpler structures, and are easier to control), humanoid-designed dexterous hands require extremely high control precision and flexibility. The dexterous hand is a high-degree-of-freedom mechanical device that simulates the functions of the human hand, possessing capabilities for grasping, operating, and sensing, making it the core actuator for fine interaction in humanoid robots.
▲Examples of humanoid robot dexterous hands (Source: Company materials)The dexterous hand is an important end effector of humanoid robots. The end effector is directly mounted on the robot’s wrist and is used to grasp workpieces or allow tools to complete tasks according to specified programs. Compared to ordinary industrial robotic hands (which have fewer degrees of freedom, simpler structures, and are easier to control), humanoid-designed dexterous hands require extremely high control precision and flexibility. The dexterous hand is a high-degree-of-freedom mechanical device that simulates the functions of the human hand, possessing capabilities for grasping, operating, and sensing, making it the core actuator for fine interaction in humanoid robots.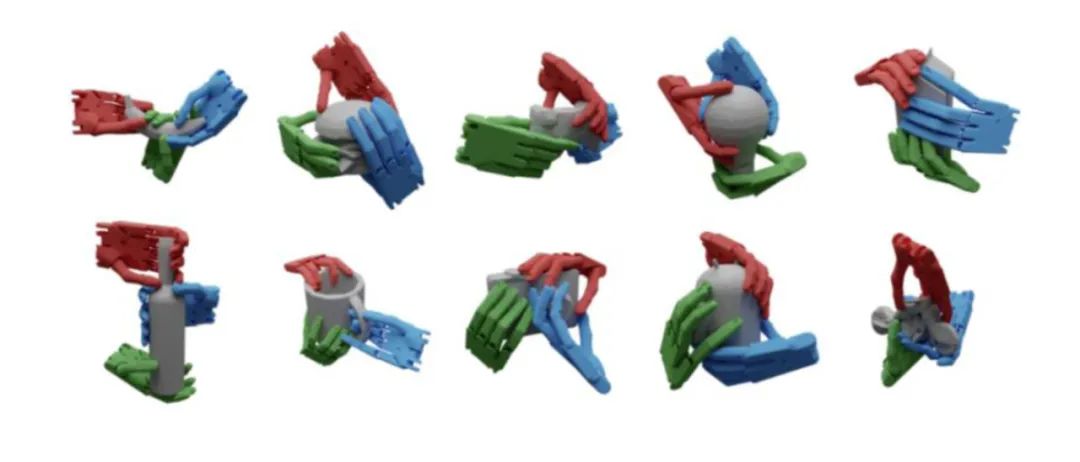 ▲Dexterous hand grasping scenarios (Source: EPIC)The performance and cost of dexterous hands are influenced by three core components: the drive system, transmission system, and sensing devices. The drive system (various types of motors) provides the power source to drive the finger joints; the transmission system (gears, linkages, tendons, etc.) efficiently transmits the power from the drive system to the finger joints and adjusts the output force, speed, and stroke; the sensing system (various sensors) monitors the finger status (position, force, touch, etc.) in real-time and feeds back to the control system for closed-loop regulation.
▲Dexterous hand grasping scenarios (Source: EPIC)The performance and cost of dexterous hands are influenced by three core components: the drive system, transmission system, and sensing devices. The drive system (various types of motors) provides the power source to drive the finger joints; the transmission system (gears, linkages, tendons, etc.) efficiently transmits the power from the drive system to the finger joints and adjusts the output force, speed, and stroke; the sensing system (various sensors) monitors the finger status (position, force, touch, etc.) in real-time and feeds back to the control system for closed-loop regulation.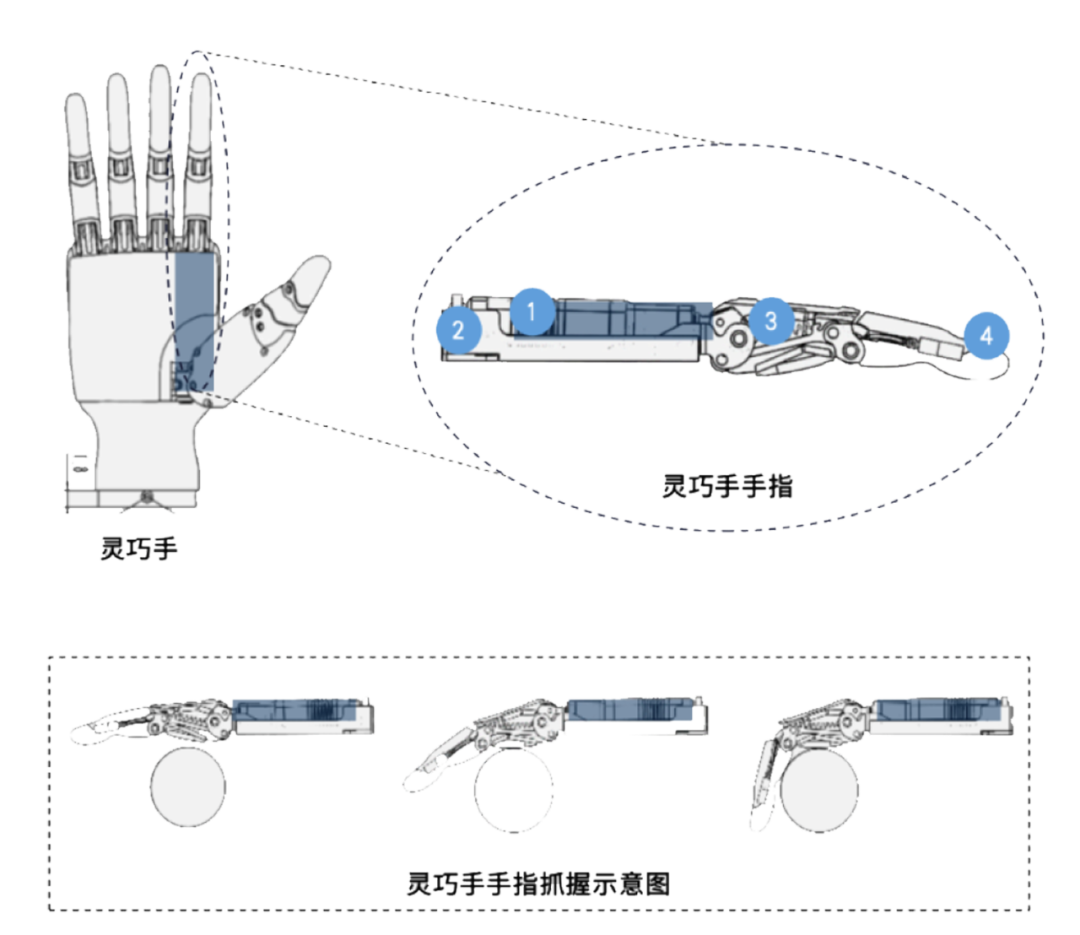 ▲Schematic diagram of dexterous hand finger structure (Source: Yinshi Robotics)Based on the drive system, dexterous hands can be classified into four types: hydraulic drive, motor drive, pneumatic drive, and shape memory alloy drive. Motor drive is currently the main driving method for multi-finger dexterous hands. Motor drive has advantages such as high driving force, high control precision, fast response, modular design, and ease of replacement and maintenance. Tesla’s Optimus and UBTECH’s humanoid robot dexterous hands have chosen motor drive.
▲Schematic diagram of dexterous hand finger structure (Source: Yinshi Robotics)Based on the drive system, dexterous hands can be classified into four types: hydraulic drive, motor drive, pneumatic drive, and shape memory alloy drive. Motor drive is currently the main driving method for multi-finger dexterous hands. Motor drive has advantages such as high driving force, high control precision, fast response, modular design, and ease of replacement and maintenance. Tesla’s Optimus and UBTECH’s humanoid robot dexterous hands have chosen motor drive.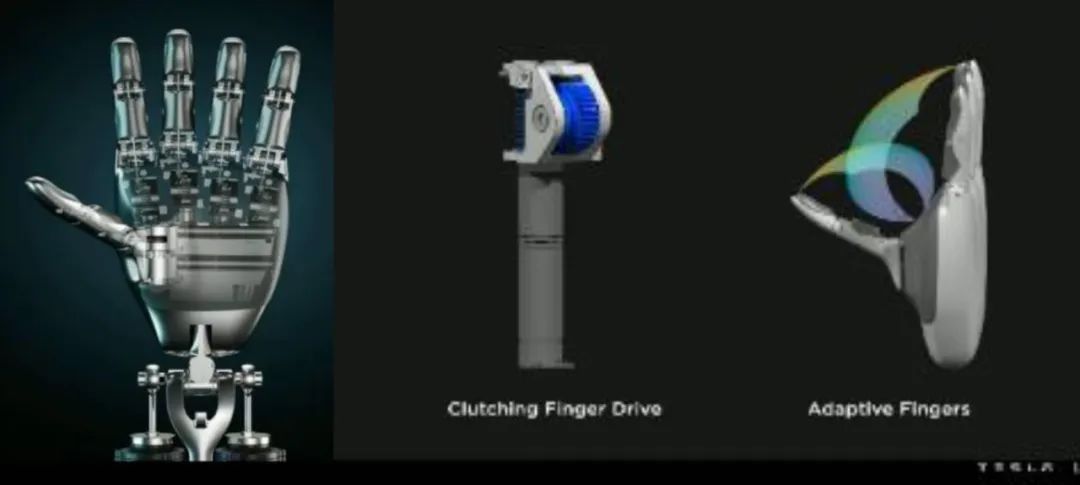 ▲Tesla’s dexterous hand uses hollow cup motor drive technology (Source: Tesla AI Day)The dexterous hand is currently mainly applied in aerospace, medical, and intelligent manufacturing fields, such as executing extravehicular tasks for spacecraft, bionic prosthetics, remote surgery, and assembling small parts on production lines. With the rapid advancements in humanoid robot technology in recent years, dexterous hands for humanoid robots are expected to become the mainstream application field for dexterous hands in the future.According to Statista, the global market size for robotic dexterous hands was approximately $1.16 billion in 2021. With the increasing demand for dexterous hands in industries such as industrial automation, aerospace, and healthcare, along with the cost reduction effects of technological advancements, the market size for dexterous hands is expected to continue to grow. According to Statista’s forecast data, the global market size for robotic dexterous hands is expected to grow from $1.16 billion in 2021 to $3.035 billion in 2030, with a CAGR of 10.9% from 2022 to 2030. At the same time, the global market capacity for robotic dexterous hands is expected to grow from 507,500 units in 2021 to 1,412,100 units in 2030, with a CAGR of 11.7% from 2022 to 2030.
▲Tesla’s dexterous hand uses hollow cup motor drive technology (Source: Tesla AI Day)The dexterous hand is currently mainly applied in aerospace, medical, and intelligent manufacturing fields, such as executing extravehicular tasks for spacecraft, bionic prosthetics, remote surgery, and assembling small parts on production lines. With the rapid advancements in humanoid robot technology in recent years, dexterous hands for humanoid robots are expected to become the mainstream application field for dexterous hands in the future.According to Statista, the global market size for robotic dexterous hands was approximately $1.16 billion in 2021. With the increasing demand for dexterous hands in industries such as industrial automation, aerospace, and healthcare, along with the cost reduction effects of technological advancements, the market size for dexterous hands is expected to continue to grow. According to Statista’s forecast data, the global market size for robotic dexterous hands is expected to grow from $1.16 billion in 2021 to $3.035 billion in 2030, with a CAGR of 10.9% from 2022 to 2030. At the same time, the global market capacity for robotic dexterous hands is expected to grow from 507,500 units in 2021 to 1,412,100 units in 2030, with a CAGR of 11.7% from 2022 to 2030.
2Main Communication Types for Dexterous Hands
Robotic dexterous hands are multi-degree-of-freedom, multi-sensor systems that require fast, real-time communication. Having a stable, reliable, high-speed, and real-time communication system for robotic dexterous hands is a key factor in ensuring their online operation. Currently, there are two typical communication methods commonly used for dexterous hands globally: one is dexterous hands developed based on internationally accepted communication protocols, such as serial communication, USB communication, CAN bus communication, Ethernet communication, and EtherCAT communication; the other is dexterous hands with user-defined communication protocols, such as PPSeCo.The communication design for dexterous hands mainly considers the following four issues: communication speed, communication distance, number of nodes, and ease of implementing complex dexterous hand control algorithms. Communication speed refers to the actual transmission speed required by the dexterous hand, while communication distance generally refers to the wiring distance from the main control unit to the dexterous hand. The number of nodes refers to how many dexterous hands can be controlled by one main control unit. The fourth point arises from the fact that dexterous hands must ensure high-speed, stable, and reliable communication, and due to the complexity of the control algorithms, the communication protocol should be designed to facilitate the implementation of complex control algorithms, thus applying the dexterous hand controller algorithms to specific operations.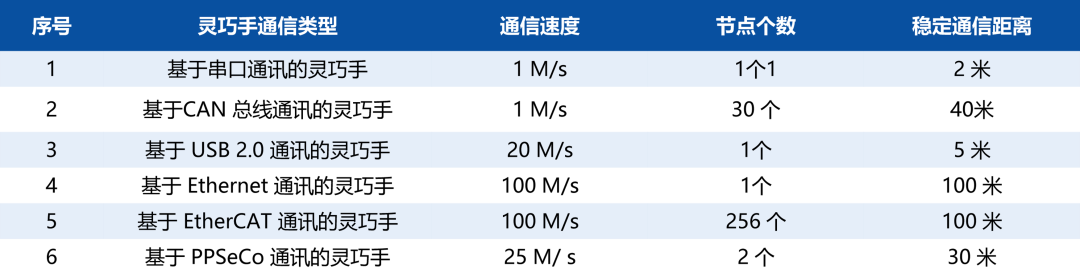 ▲Comparison of dexterous hand communication busesFrom the comparison table, EtherCAT bus is currently the most suitable real-time Ethernet communication bus for humanoid robot dexterous hands, and dexterous hands based on EtherCAT can achieve the desired performance indicators.
▲Comparison of dexterous hand communication busesFrom the comparison table, EtherCAT bus is currently the most suitable real-time Ethernet communication bus for humanoid robot dexterous hands, and dexterous hands based on EtherCAT can achieve the desired performance indicators.
3Dexterous Hand System Designed Based on EtherCAT
 The typical EtherCAT real-time communication dexterous hand circuit board mainly includes a microprocessor, EtherCAT slave communication module, finger communication circuit module, processor expansion memory module, and power conversion module.The microprocessor circuit module is the main processing unit of the dexterous hand circuit board; the EtherCAT slave communication circuit module is used to implement the necessary hardware circuit modules for the EtherCAT protocol; the finger circuit module is a custom unit for finger communication; the voltage conversion circuit module converts the input voltage from the PCB to 3.3V, 2.5V, or 1.2V, supplying power to the entire PCB; the expansion memory SRAM is used to expand the microprocessor memory to meet the large memory requirements of the EtherCAT protocol.
The typical EtherCAT real-time communication dexterous hand circuit board mainly includes a microprocessor, EtherCAT slave communication module, finger communication circuit module, processor expansion memory module, and power conversion module.The microprocessor circuit module is the main processing unit of the dexterous hand circuit board; the EtherCAT slave communication circuit module is used to implement the necessary hardware circuit modules for the EtherCAT protocol; the finger circuit module is a custom unit for finger communication; the voltage conversion circuit module converts the input voltage from the PCB to 3.3V, 2.5V, or 1.2V, supplying power to the entire PCB; the expansion memory SRAM is used to expand the microprocessor memory to meet the large memory requirements of the EtherCAT protocol.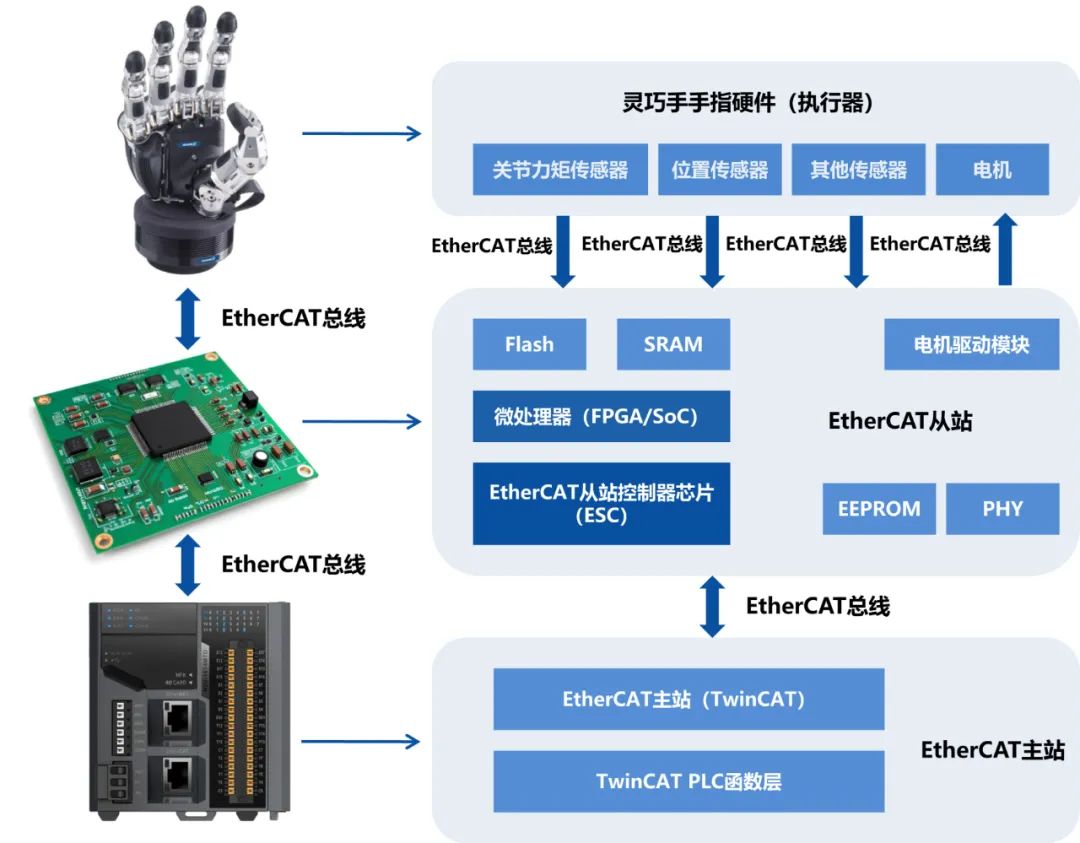 ▲Overall structure of the humanoid robot dexterous hand system based on EtherCAT
▲Overall structure of the humanoid robot dexterous hand system based on EtherCAT
4Dexterous Hand Palm Board EtherCAT Slave System
The dexterous hand palm board EtherCAT slave system mainly includes a microprocessor, external memory, Flash, finger controllers, and EtherCAT slave communication modules.1)The microprocessor is the core of the dexterous hand EtherCAT slave design and is also the challenging part of the slave design. The processor’s role is to control and communicate with the EtherCAT slave chip, processing information sent from the fingers, especially requiring real-time processing of the EtherCAT protocol layer.2)External memory is needed because the EtherCAT protocol layer requires a large amount of memory, and relying solely on the internal RAM of the controller chip would lead to insufficient memory space, thus requiring external memory expansion.3)Flash is used to store the configuration information of the controller, ensuring that the program is not lost after power failure, allowing the program to automatically load into the microprocessor upon power-up.4)The finger controller (motor drive module) enables real-time control of the dexterous hand fingers and receives feedback information from the fingers in real-time.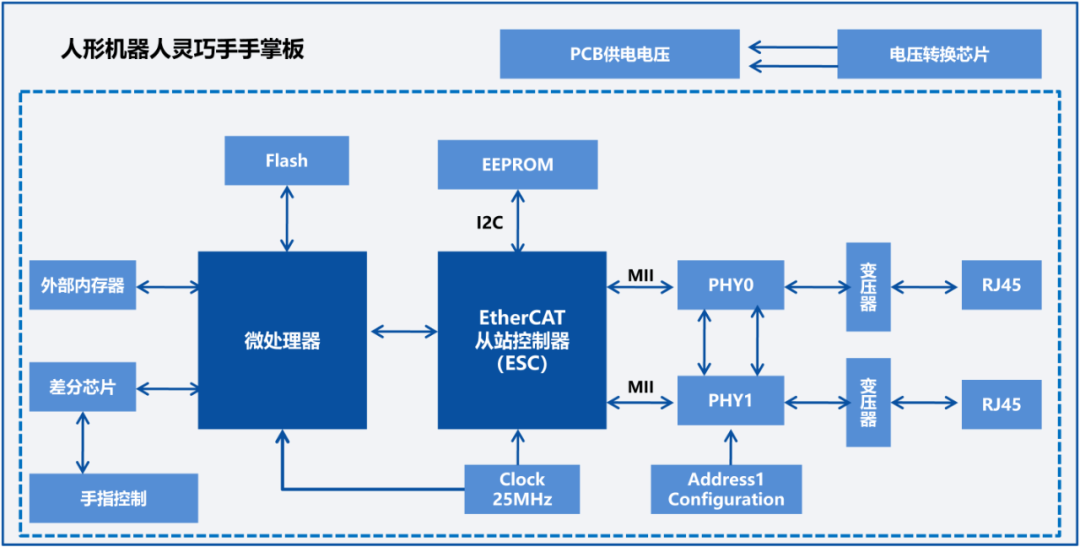 ▲Structure of the EtherCAT slave system for the dexterous handThe EtherCAT slave communication module includes the EtherCAT slave controller chip (ESC), clock unit, EEPROM, Ethernet chip, and transformer, among other auxiliary circuit units, with the ESC being the core of the slave design.1)The ESC slave chip is responsible for communicating with the processor, reading data from the user layer and data transmitted by the EtherCAT master in real-time.2)The clock unit provides the necessary clock for the slave chip and processor to operate.3)The EEPROM stores the communication configuration information for the dexterous hand slave. Since the ESC slave chip needs to configure the working mode, such as PDI working mode configuration, communication address configuration, and data structure configuration used during transmission, these specific EtherCAT slave communication methods required for practical applications of the dexterous hand are implemented through configuration XML files, and the corresponding description files for the dexterous hand EtherCAT working mode will be saved in the EEPROM.4)The Ethernet PHY chip ensures the physical layer interface requirements for the Ethernet needed for the slave to operate.5)The transformer ensures that the Ethernet chip meets the requirements of IEEE802.3 and ANSIX3.263 standards.
▲Structure of the EtherCAT slave system for the dexterous handThe EtherCAT slave communication module includes the EtherCAT slave controller chip (ESC), clock unit, EEPROM, Ethernet chip, and transformer, among other auxiliary circuit units, with the ESC being the core of the slave design.1)The ESC slave chip is responsible for communicating with the processor, reading data from the user layer and data transmitted by the EtherCAT master in real-time.2)The clock unit provides the necessary clock for the slave chip and processor to operate.3)The EEPROM stores the communication configuration information for the dexterous hand slave. Since the ESC slave chip needs to configure the working mode, such as PDI working mode configuration, communication address configuration, and data structure configuration used during transmission, these specific EtherCAT slave communication methods required for practical applications of the dexterous hand are implemented through configuration XML files, and the corresponding description files for the dexterous hand EtherCAT working mode will be saved in the EEPROM.4)The Ethernet PHY chip ensures the physical layer interface requirements for the Ethernet needed for the slave to operate.5)The transformer ensures that the Ethernet chip meets the requirements of IEEE802.3 and ANSIX3.263 standards.
5MaLing Semiconductor Dexterous Hand EtherCAT System Solution
MaLing Semiconductor’s CF110x series EtherCAT slave controller chips can be applied to the dexterous hand palm board EtherCAT slave system to achieve a control platform with good real-time performance, fast communication speed, and ease of implementing complex algorithms.The CF110x series can provide up to three data transceiver ports, supporting full-duplex communication at 100 Mbit/s, allowing the slave to flexibly implement various topologies. It has eight built-in FMMU units with FMMU logical address mapping functions; eight SM channels for convenient organization and management of the chip’s memory areas; supports 4KB register space and 8KB process data storage space; and supports 64-bit distributed clock, providing high-precision interrupt signals to the microprocessor. The CF110x series supports numerous PDI pins, allowing it to directly drive 32 digital I/O signals without an application layer microprocessor, or it can use an external microprocessor for access, constructing complex EtherCAT slaves.Since the dexterous hand is located at the end of the entire system, retaining one PHY is sufficient to meet design requirements. By using the MaLing Semiconductor CF1106 series chip as the ESC, only one transformer needs to be added externally to achieve communication functionality.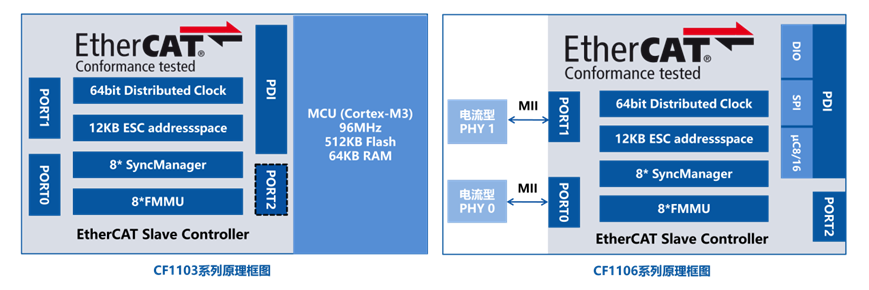 ▲Structure diagram of MaLing Semiconductor CF110x series chip
▲Structure diagram of MaLing Semiconductor CF110x series chip ▲Physical image of MaLing Semiconductor CF110x series chipThe advantages of the CF110x series in the dexterous hand EtherCAT system include:▶ The product has been officially authorized by Beckhoff and has passed the ETG official consistency testing certification, complying with EtherCAT communication protocol standards;▶ It has eight built-in Fieldbus Memory Management Units (FMMUs) and eight Sync Managers (SMs), supporting three types of data interfaces (PDI) – digital I/O, SPI, and 8/16-bit uC interfaces;▶ It has a built-in 64-bit distributed clock (DC), enabling high-precision synchronization of EtherCAT slaves (<< 1μs);▶ It can optionally integrate a 32-bit ARM Cortex-M3 core microcontroller (MCU) or two current-type PHYs (compatible with 100BASE-TX), offering strong anti-interference capability, high signal integrity, and good stability;▶ Multiple packaging options are available, supporting QFN64L (9x9mm), QFN88L (10x10mm), and QFN100L (12x12mm) packages.As an internationally accepted industrial Ethernet real-time communication protocol, the dexterous hands designed based on EtherCAT communication technology can be integrated with products designed by different organizations worldwide based on EtherCAT, thus promoting further application and adoption. MaLing Semiconductor provides flexible, convenient, and easy-to-use rich software and hardware development tools for the CF110x series dexterous hand EtherCAT system applications, along with technical support from a seasoned team, facilitating engineers in development and migration testing, helping customers quickly achieve project upgrades and iterations.MaLing Semiconductor CF110x series EtherCAT slave controller chips have an operating temperature range of -40℃ to 85℃ and are available in various packages, currently in mass production and open for samples. For more information on the CF110x series products and application solutions, please contact Manager Li at MaLing Semiconductor at 18759007589 (WeChat same number).
▲Physical image of MaLing Semiconductor CF110x series chipThe advantages of the CF110x series in the dexterous hand EtherCAT system include:▶ The product has been officially authorized by Beckhoff and has passed the ETG official consistency testing certification, complying with EtherCAT communication protocol standards;▶ It has eight built-in Fieldbus Memory Management Units (FMMUs) and eight Sync Managers (SMs), supporting three types of data interfaces (PDI) – digital I/O, SPI, and 8/16-bit uC interfaces;▶ It has a built-in 64-bit distributed clock (DC), enabling high-precision synchronization of EtherCAT slaves (<< 1μs);▶ It can optionally integrate a 32-bit ARM Cortex-M3 core microcontroller (MCU) or two current-type PHYs (compatible with 100BASE-TX), offering strong anti-interference capability, high signal integrity, and good stability;▶ Multiple packaging options are available, supporting QFN64L (9x9mm), QFN88L (10x10mm), and QFN100L (12x12mm) packages.As an internationally accepted industrial Ethernet real-time communication protocol, the dexterous hands designed based on EtherCAT communication technology can be integrated with products designed by different organizations worldwide based on EtherCAT, thus promoting further application and adoption. MaLing Semiconductor provides flexible, convenient, and easy-to-use rich software and hardware development tools for the CF110x series dexterous hand EtherCAT system applications, along with technical support from a seasoned team, facilitating engineers in development and migration testing, helping customers quickly achieve project upgrades and iterations.MaLing Semiconductor CF110x series EtherCAT slave controller chips have an operating temperature range of -40℃ to 85℃ and are available in various packages, currently in mass production and open for samples. For more information on the CF110x series products and application solutions, please contact Manager Li at MaLing Semiconductor at 18759007589 (WeChat same number).
Previous Recommendations
EtherCAT Popular Science Series (3): Applications of EtherCAT Technology in Servo Drives
EtherCAT Popular Science Series (2): Advantages of EtherCAT Technology and Implementation Methods for Slave Systems
Application Solutions for EtherCAT-Modbus/RTU Protocol Converters Based on MaLing Semiconductor CF110x Series
