EtherCAT, as a real-time Ethernet solution, is favored in industrial automation applications due to its high performance. How does EtherCAT ensure high efficiency, real-time performance, and flexibility in fieldbus communication? This article will focus on its key analysis and explanation.
 Principle of EtherCAT
Principle of EtherCAT
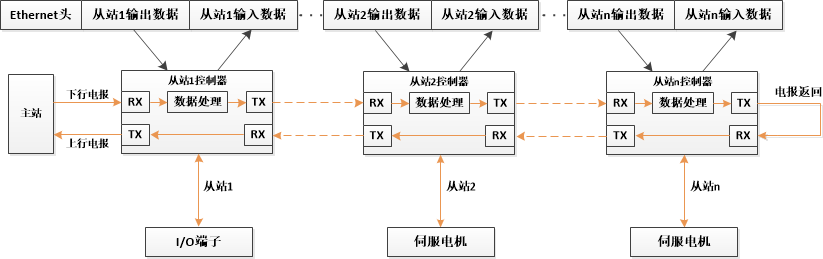
EtherCAT (Ethernet Control Automation Technology) is a high-performance industrial network fieldbus system. It is based on Ethernet and specifically developed for real-time Ethernet communication networks for industrial automation control. EtherCAT is essentially a highly flexible real-time industrial Ethernet protocol that uses a master-slave communication model.
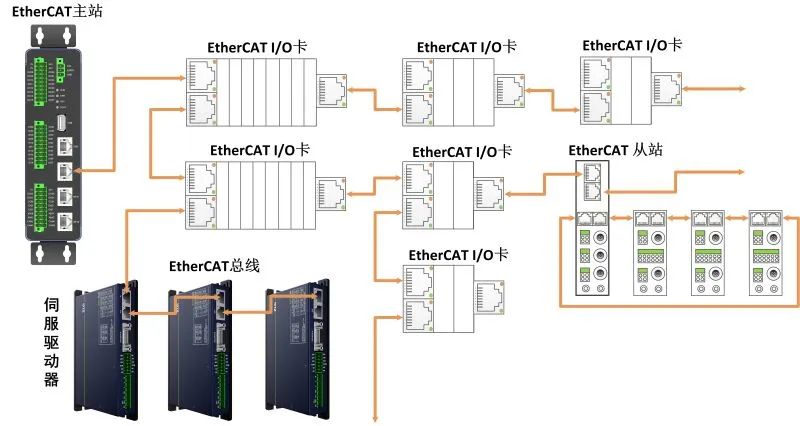
A complete EtherCAT system consists of one master station and multiple slave devices. When the EtherCAT master sends messages to the slaves, the slave devices read the corresponding data packets as the message passes through their nodes, while also inserting output data into the message during its passage, thereby achieving a high stability, low cost, and high real-time fieldbus control system based on standard Ethernet.
 Features of EtherCAT
Features of EtherCAT
1. Strong Compatibility
EtherCAT master devices use standard Ethernet controllers, and computers with network interface cards and embedded devices with Ethernet control can serve as EtherCAT masters.
EtherCAT data transmission is processed in hardware, providing higher data transfer efficiency and faster transmission rates, while ensuring stable latency times, significantly improving the reliability and real-time performance of the data transfer process. Additionally, the EtherCAT protocol supports the connection or disconnection of individual slave nodes, meaning that if one slave node is removed from the EtherCAT network, the remaining components can still operate normally. Furthermore, EtherCAT supports master redundancy and cable redundancy, making it suitable for applications with high reliability requirements.
In traditional Ethernet technology, each device can receive all data packets on the network, but useful device information must be extracted one by one at the application layer, severely impacting the execution efficiency at the application layer. In EtherCAT, during data transmission, slave devices dynamically insert their data into the same data stream, eliminating the need to parse and process Ethernet data packets after reception, allowing communication to be completed within a single Ethernet frame.
4. Strong Flexibility
EtherCAT supports various connection structure topologies such as linear, tree, ring, star, and bus structures. The connecting cables can use standard 100Base-TX Ethernet cables, allowing for flexible and varied topologies that can greatly reduce hardware development and assembly costs. EtherCAT networks can connect up to 65,535 devices.
 Introduction to ZMC300E EtherCAT Master Controller
Introduction to ZMC300E EtherCAT Master Controller
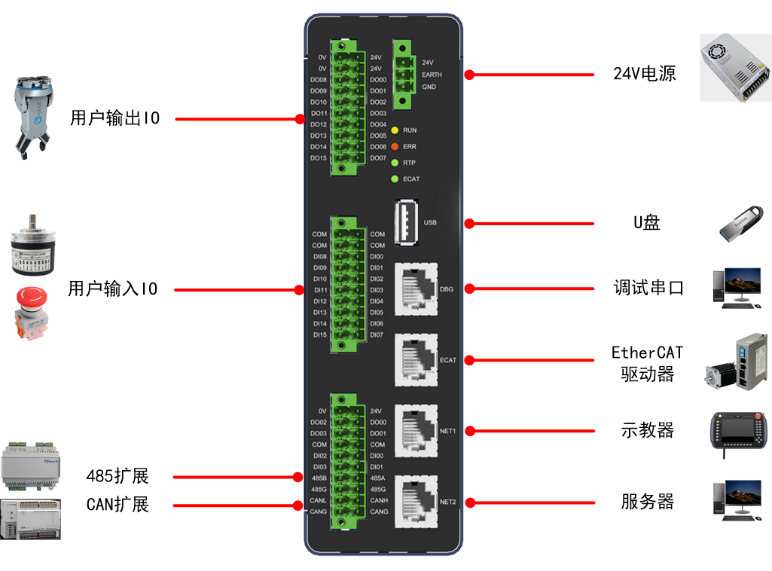
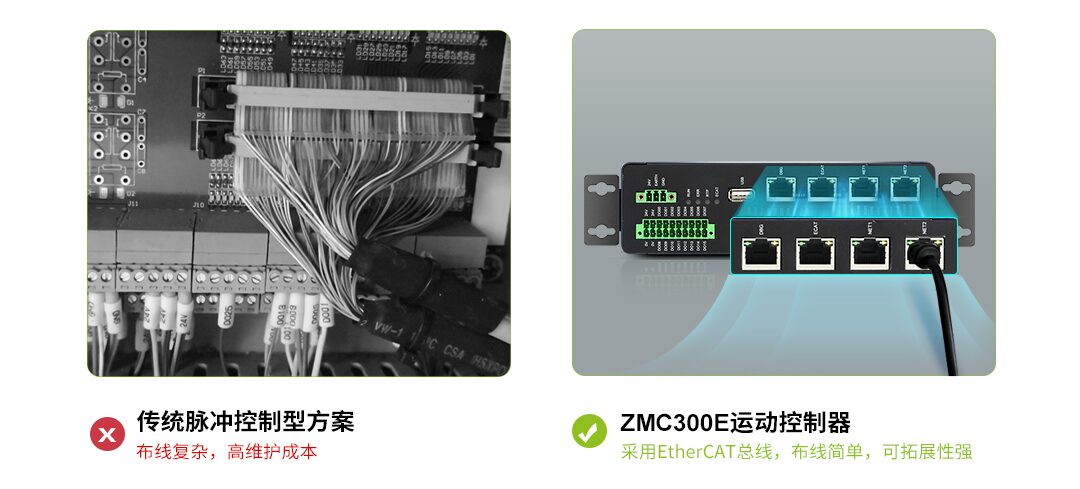
ZMC300E is the latest generation of intelligent bus-type EtherCAT master controller developed by Guangzhou Zhiyuan Electronics Co., Ltd. It is a machine controller aimed at the era of factory intelligence. It adopts an advanced embedded ARM solution in the industrial field, integrating a real-time operating system and intelligent algorithms, and is equipped with an industrial graphical programming software development environment. Guided by the EtherCAT industrial Ethernet protocol, it can quickly, effectively, and conveniently build CNC intelligent devices to adapt to the transformation of factory intelligence and informatization industries.
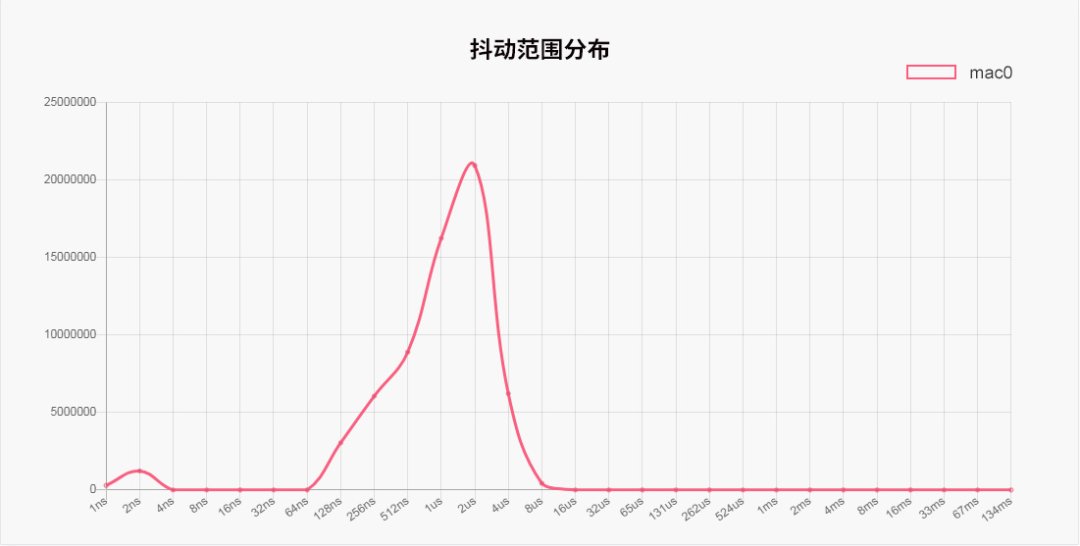
ZMC300E uses an advanced embedded ARM solution in the industrial field, utilizing TI’s Cortex®-A8 core AM335X application processor as the core, paired with the Xenomai high real-time Linux system, and is carefully designed with one EtherCAT port for master use. Its communication can achieve task jitter within ±15μs for millisecond cycle tasks, meeting the high real-time requirements of motion controllers.
To meet different automation application needs, ZMC300E also provides a variety of rich hardware interfaces, including 1 CAN, 1 RS-485, 2 Ethernet ports, 32 user I/O, etc.