


Phone | 010-82030532 Mobile | 18501361766
WeChat | tech9999 Email | [email protected]
DLR Researchers Test Sensors and Robotic Systems for Lunar Water Ice Detection
Compiled by the Open Source Intelligence Center of Yuanwang Think Tank
 Q&AWhat sensors were tested for detecting water ice on the Moon? The researchers used ground-penetrating radar, fiber-optic distributed acoustic sensing, seismic sources, multispectral stereo panoramic cameras, and laser-induced breakdown spectroscopy.How do these sensors work together to identify subsurface ice? The radar shows dielectric contrasts, while seismic and fiber-optic measurements map stratigraphy through vibrational characteristics. The panoramic camera provides mineral and terrain data, and LIBS detects hydrogen in rock samples.How do these technologies compare to other lunar water detection methods? Orbital sensors can estimate surface composition, but LUNA’s active focus is on rovers and in-situ sensing, which can directly characterize subsurface structures and verify the presence and location of ice.Researchers at the German Aerospace Center (DLR) in Cologne are evaluating a set of sensing and signal processing technologies designed to locate and map water ice in permanently shadowed regions of the Moon. The European Space Agency (ESA) LUNA simulation facility’s tests utilize robotic rovers, ground-penetrating instruments, and fiber-optic sensing networks to study how future missions can detect frozen water in the lunar regolith.The Moon core station features a 700-square-meter testing platform filled with simulated lunar soil to assess payloads and mobility systems. DLR planetary scientist Nicole Schmitz stated that large-area mobility and multi-sensor integration are crucial for surface exploration.
Q&AWhat sensors were tested for detecting water ice on the Moon? The researchers used ground-penetrating radar, fiber-optic distributed acoustic sensing, seismic sources, multispectral stereo panoramic cameras, and laser-induced breakdown spectroscopy.How do these sensors work together to identify subsurface ice? The radar shows dielectric contrasts, while seismic and fiber-optic measurements map stratigraphy through vibrational characteristics. The panoramic camera provides mineral and terrain data, and LIBS detects hydrogen in rock samples.How do these technologies compare to other lunar water detection methods? Orbital sensors can estimate surface composition, but LUNA’s active focus is on rovers and in-situ sensing, which can directly characterize subsurface structures and verify the presence and location of ice.Researchers at the German Aerospace Center (DLR) in Cologne are evaluating a set of sensing and signal processing technologies designed to locate and map water ice in permanently shadowed regions of the Moon. The European Space Agency (ESA) LUNA simulation facility’s tests utilize robotic rovers, ground-penetrating instruments, and fiber-optic sensing networks to study how future missions can detect frozen water in the lunar regolith.The Moon core station features a 700-square-meter testing platform filled with simulated lunar soil to assess payloads and mobility systems. DLR planetary scientist Nicole Schmitz stated that large-area mobility and multi-sensor integration are crucial for surface exploration.
Multimodal Sensing for Water Ice Detection

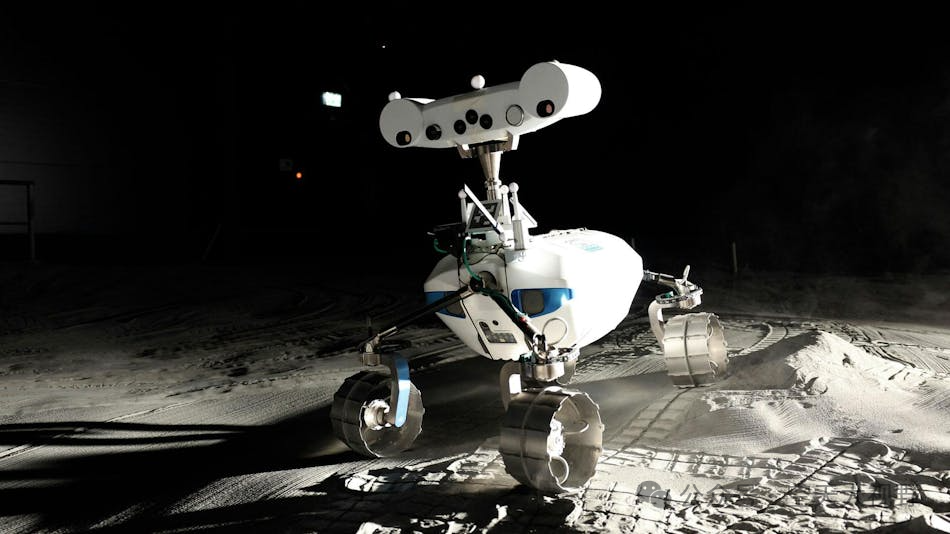
Engineers embedded acrylic structures in a three-meter-deep regolith to simulate radar contrasts of subsurface ice layers. LRU1 is a lightweight robotic rover that tows a ground-penetrating radar device to scan beneath the surface. Radar data is combined with terrain information from LRU1’s multispectral stereo panoramic camera, which collects image data across a wide spectrum to estimate mineral composition and build a three-dimensional elevation model for autonomous navigation.The second sensing method employs a seismic source known as a Portable Active Seismic Source (PASS). This device introduces vibrations to the simulated lunar surface, which are recorded through fiber-optic cables laid on the test platform. The system uses distributed acoustic sensing, where subtle changes in the fiber indicate ground movement and reveal subsurface layering. This method can be deployed on the Moon as fiber-optic cables can be quickly laid and operate passively over long distances.
Spectroscopy for Hydrogen Detection

To analyze hydrogen in rock samples, DLR researchers employed laser-induced breakdown spectroscopy (LIBS). The LIBS instrument emits pulsed lasers to create plasma on the target and measures the emitted light to determine elemental composition. The sensors are mounted in a payload box operated by the LRU2 robotic arm, allowing the instrument to be brought close to the rock surface.LRU2 is also equipped with autonomous sampling processing and onboard computing tools, providing greater independence for future robotic missions.
Simulated Mission Operations

Researchers combined radar, camera, seismic, fiber-optic, and LIBS data to generate three-dimensional views of both surface and subsurface. This multimodal approach aids in locating and mapping simulated water ice deposits. In flight missions, these sensors will be directly integrated into the rover structure rather than carried on trailers.This activity supports the DLR team’s mission concept proposed to the European Space Agency, planned for deployment on the under-development Argonaut lander, which will carry payloads and support ground operations. Schmitz stated that this operation demonstrates that all mission elements are combat-ready and compatible.Field-validated robotic systemsLRU1 and LRU2 rovers previously participated in field trials as part of the ARCHES activity on Mount Etna in Italy, performing autonomous navigation, sampling, and multi-robot collaboration. During lunar exploration, they demonstrated obstacle avoidance and reliable operation under low-angle simulated auroral conditions produced by a dedicated solar simulator.“We have achieved all objectives in the Polar Explorer activity,” said Martin Gona from DLR’s Robotics and Mechatronics Institute.Original link:https://www.militaryaerospace.com/sensors/news/55331118/dlr-researchers-test-sensors-and-robotic-systems-for-lunar-water-ice-detection

