
Point ”Jinan CNC Mold Technology Research Institute” Focus
”Jinan CNC Mold Technology Research Institute” Focus
Industry frontier, mechanical videos, CNC processing technology, 3D printing, industrial robots, productionprocesses, molds, machine tools, and other cutting-edge information are waiting for you here!
Before understanding the structure of general industrial robots,
let’s first take a look at the animation simulation of the robot arm joints.
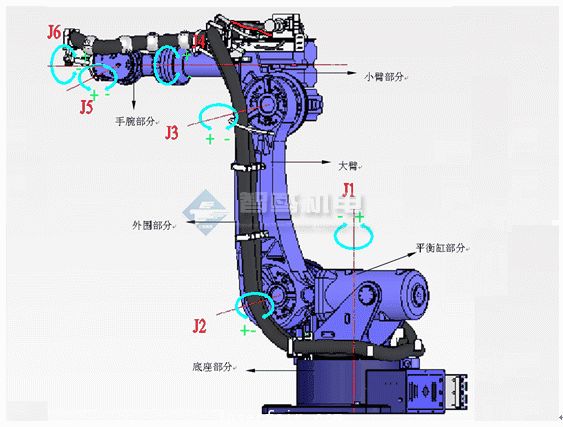
Germany’s KUKA industrial robot
main internal structure
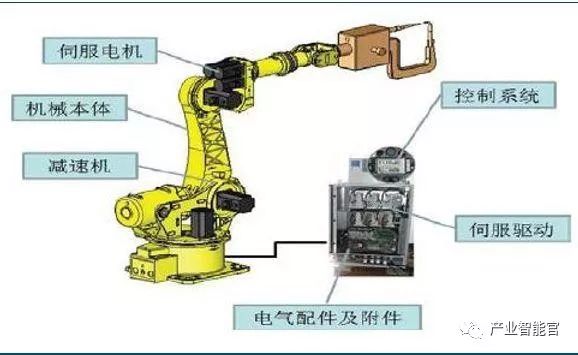
Industrial robots are widely used in industrial manufacturing, automotive manufacturing, electronics, food, etc. They can replace repetitive machine-like manipulation tasks and are machines that rely on their own power and control capabilities to achieve various functions. They can be commanded by humans and can also operate according to pre-arranged programs. Now let’s discuss the basic main components of industrial robots.

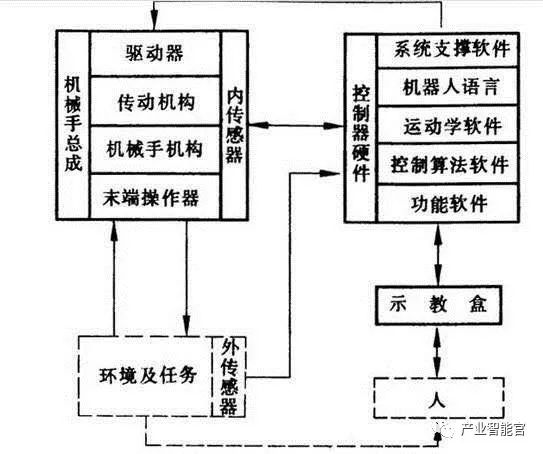
1. Main Body
The main mechanical body includes the base and the actuating mechanism, consisting of the upper arm, lower arm, wrist, and hand, forming a multi-degree-of-freedom mechanical system. Some robots also have walking mechanisms. Industrial robots generally have 6 degrees of freedom or even more, while the wrist typically has 1 to 3 degrees of freedom.
2. Drive System
The drive system of industrial robots can be divided into three main categories based on the power source: hydraulic, pneumatic, and electric. Depending on requirements, a combination of these three types can also be used. The drive system consists of a power device and transmission mechanism to generate corresponding movements in the actuating mechanism. Each of these three basic drive systems has its characteristics, with the electric drive system being the mainstream today.
Due to low inertia, high torque AC and DC servo motors and their accompanying servo drives (inverters, DC pulse width modulators) are widely adopted. This system does not require energy conversion, is easy to use, and has sensitive control. Most motors need to be equipped with precise transmission mechanisms: reducers. The reducer is a speed converter that reduces the motor’s rotational speed to the desired speed while achieving a larger torque, thereby reducing speed and increasing torque. When the load is heavy, simply increasing the power of the servo motor is not cost-effective; instead, the output torque can be increased within an appropriate speed range through the reducer. Servo motors are prone to overheating and low-frequency vibrations during low-frequency operations, and prolonged repetitive work is not conducive to ensuring their accuracy and reliable operation. The existence of precision reduction motors allows servo motors to operate at suitable speeds while enhancing the rigidity of the machine body and outputting greater torque. Currently, there are two mainstream types of reducers: harmonic reducers and RV reducers.

3. Control System
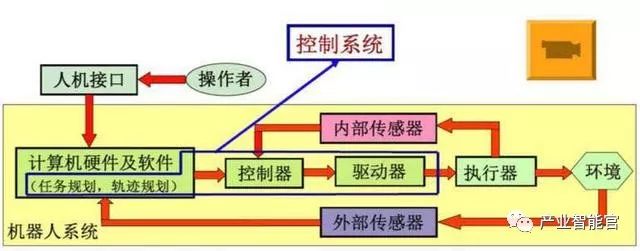
The robot control system is the brain of the robot and the primary factor determining the robot’s functionality and capabilities. The control system issues command signals to the drive system and actuating mechanism according to the input program and performs control. The main task of industrial robot control technology is to control the robot’s range of motion, posture, trajectory, and action timing within the workspace. It features easy programming, software menu operation, a user-friendly human-machine interface, online operation prompts, and convenience of use.
The controller system is the core of the robot, and foreign companies have conducted closed experiments on it in China. In recent years, with the development of microelectronics technology, the performance of microprocessors has improved significantly while their prices have decreased. Currently, 32-bit microprocessors are available on the market for 1-2 dollars. The high cost-performance microprocessors have brought new development opportunities for robot controllers, making it possible to develop low-cost, high-performance robot controllers. To ensure that the system has sufficient computing and storage capabilities, most robot controllers now use powerful ARM series, DSP series, POWERPC series, Intel series, and other chips.
Due to the existing general-purpose chips not fully meeting the requirements of some robotic systems in terms of price, functionality, integration, and interfaces, there has been a demand for SoC (System on Chip) technology in robot systems, integrating specific processors with required interfaces to simplify the design of peripheral circuits, reduce system size, and lower costs. For example, Actel integrates the NEOS or ARM7 processor cores into its FPGA products, forming a complete SoC system. In the field of robot technology controllers, research is mainly concentrated in the United States and Japan, with mature products available, such as those from DELTATAU in the USA and PONTEK in Japan. Their motion controllers are based on DSP technology and adopt an open structure based on PC.
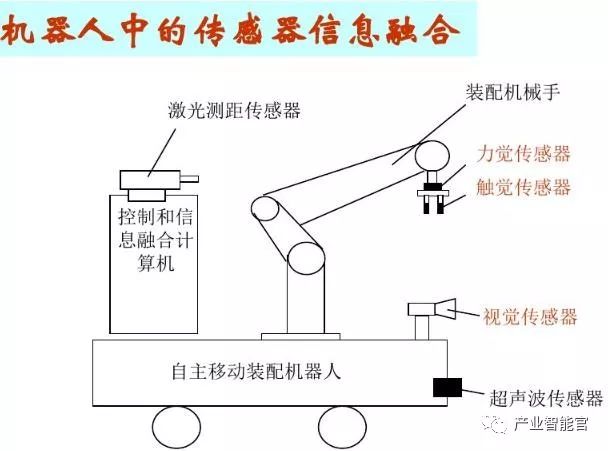
4. Perception System
It consists of internal sensor modules and external sensor modules, obtaining meaningful information about the internal and external environmental states.
Internal sensors: Sensors used to detect the robot’s own status (such as angles between arms), mostly position and angle sensors. Specifically, there are position sensors, angle sensors, etc.
External sensors: Sensors used to detect the robot’s environment (such as detecting objects and the distance to objects) and conditions (such as detecting whether the grasped object is slipping). Specifically, there are distance sensors, vision sensors, tactile sensors, etc.
The use of intelligent sensing systems has improved the robot’s mobility, practicality, and intelligence standards. The human perception system is agile in obtaining information from the external world; however, for certain specific information, sensors can be more effective than human systems.
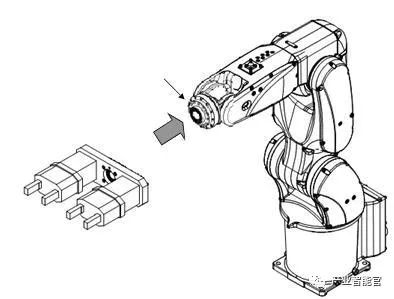
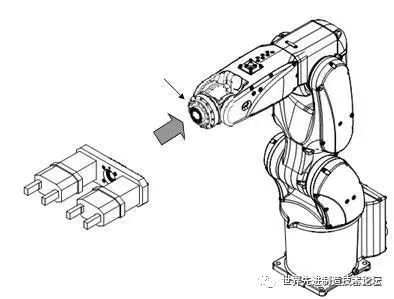
5. End Effector
The end effector is the component connected to the last joint of the robotic arm, typically used to grasp objects and connect with other mechanisms to perform required tasks. In robot manufacturing, end effectors are generally not designed or sold; in most cases, they only provide a simple gripper. Usually, end effectors are mounted on the flanges of the robot’s 6 axes to complete tasks in a given environment, such as welding, painting, gluing, and loading/unloading parts, which are tasks that require robots to accomplish.
Overview of Servo Motors
Servo drives, also known as “servo controllers” or “servo amplifiers,” are controllers used to control servo motors, functioning similarly to how inverters act on ordinary AC motors, and are part of the servo system. Generally, they control servo motors through position, speed, and torque to achieve high precision in transmission system positioning.
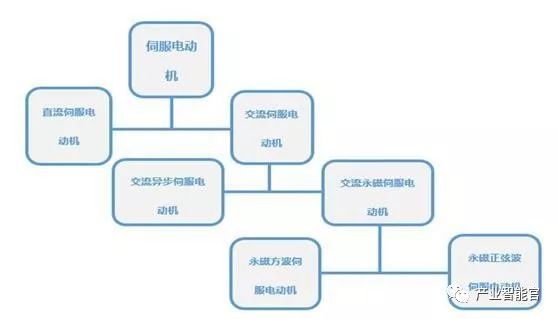
I. Classification of Servo Motors
They are divided into two main categories: DC and AC servo motors, with AC servo motors further divided into asynchronous and synchronous servo motors. Currently, AC systems are gradually replacing DC systems. Compared to DC systems, AC servo motors have advantages such as high reliability, good heat dissipation, low rotational inertia, and the ability to operate under high voltage conditions. Because they are brushless and do not use commutators, AC servo systems are also known as brushless servo systems, where the motors used are brushless cage asynchronous motors and permanent magnet synchronous motors.
1) DC servo motors are divided into brushed and brushless motors.
① Brushed motors are low-cost, simple in structure, have high starting torque, wide speed range, and are easy to control. They require maintenance (changing carbon brushes) and generate electromagnetic interference, thus having specific environmental requirements. They are typically used in cost-sensitive ordinary industrial and civilian applications;
② Brushless motors are small in size, lightweight, produce high output, respond quickly, have high speed and low inertia, stable torque, and smooth rotation. They are complex in control, intelligent, and have flexible electronic commutation methods, which can be square wave or sine wave commutation. These motors require no maintenance, are highly efficient and energy-saving, have low electromagnetic radiation, low temperature rise, and long lifespan, making them suitable for various environments.
II. Characteristics of Different Types of Servo Motors
1) Advantages and disadvantages of DC servo motors
Advantages: Precise speed control, stiff torque-speed characteristics, simple control principles, ease of use, and low cost.
Disadvantages: Brush commutation, speed limitations, additional resistance, and generation of wear particles (not suitable for dust-free or explosive environments).
2) Advantages and disadvantages of AC servo motors
Advantages: Good speed control characteristics, smooth control across the entire speed range, almost no oscillation, over 90% high efficiency, low heat generation, high-speed control, and high precision position control (depending on encoder accuracy). In the rated operating area, it can achieve constant torque, has low inertia, low noise, and no brush wear, requiring no maintenance (suitable for dust-free and explosive environments).
Disadvantages: More complex control, requires on-site adjustment of drive parameters to determine PID parameters, and requires more wiring.
Currently, mainstream servo drives use digital signal processors (DSP) as the control core, enabling the implementation of relatively complex control algorithms and achieving digitization, networking, and intelligence. Power devices generally adopt drive circuits designed around intelligent power modules (IPM), which integrate driving circuits and have fault detection protection circuits for overvoltage, overcurrent, overheating, and undervoltage. Additionally, a soft-start circuit is included in the main circuit to reduce the impact on the driver during startup.
Power drive units first rectify the input three-phase electricity or mains power through a three-phase full-bridge rectifier circuit to obtain the corresponding DC electricity. The rectified three-phase electricity or mains power is then converted to drive three-phase permanent magnet synchronous AC servo motors via a three-phase sine PWM voltage inverter. The entire process of the power drive unit can be simplified as an AC-DC-AC process. The main topology circuit of the rectifier unit (AC-DC) is a three-phase full-bridge uncontrolled rectifier circuit.

III. Wiring Diagram of Servo System
1. Wiring of the Driver

The servo driver mainly consists of control circuit power supply, main control circuit power supply, servo output power supply, controller input CN1, encoder interface CN2, and connection port CN3. The control circuit power supply is a single-phase AC power supply, and the input power can be single-phase or three-phase, but it must be 220V. This means that when using three-phase input, our three-phase power must be transformed to connect. For drivers with lower power, single-phase direct drive is possible, and in single-phase connections, terminals R and S must be connected. The servo motor outputs U, V, and W must not be connected to the main circuit power supply, as this may burn out the driver. The CN1 port is mainly used for connecting the upper-level controller, providing input, output, encoder ABZ three-phase output, and various monitoring signal analog outputs.
2. Encoder Wiring
From the above diagram, we can see that of the nine terminals, we only use five: one shielded wire, two power wires, and two serial communication signals (+-), which are similar to our ordinary encoder wiring.
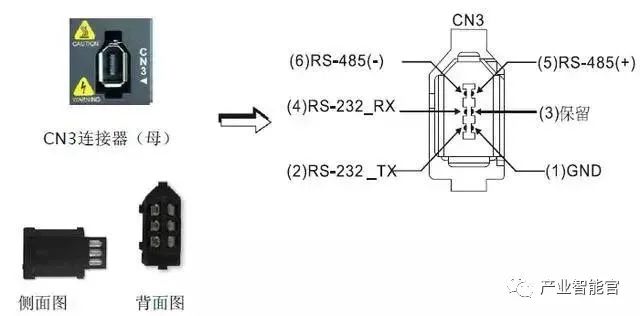
3. Communication Port
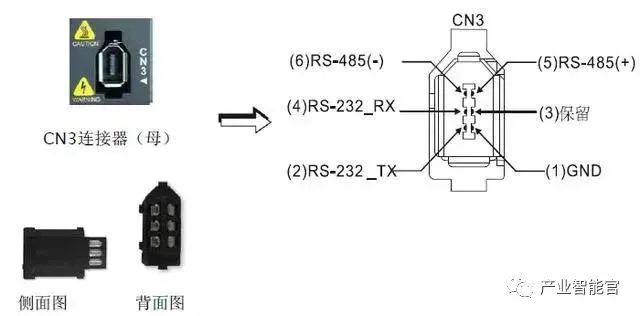
The driver connects to the computer PLC, HMI, and other upper-level machines through the CN3 port, using MODBUS communication to control the driver, which can use RS232 or RS485 for communication.
IV. Servo Driver Market
Robots have very strict requirements for joint drive motors, and AC servo motors are widely used in industrial robots. Currently, the high-end market in China is mainly occupied by foreign famous enterprises, primarily from Japan and Europe and America. There is a large space for domestic replacement in the future. Currently, foreign brands occupy nearly 80% of the Chinese AC servo market, mainly from Japan and Europe and America. Among them, Japanese products hold the largest market share of about 50%, with well-known brands including Panasonic, Mitsubishi Electric, Yaskawa, Sanyo, Fuji, etc. Their products are characterized by technology and performance levels that meet the needs of Chinese users, achieving a stable and continuous customer base with good cost-performance ratio and high reliability, especially having a monopoly advantage in the small and medium-sized OEM market.
Precision Reducers
Recently, I saw a piece of news: the robot industry needs to break the “bottleneck” problem, which resonated deeply. With the increase in labor costs, replacing humans with industrial robots has become a trend. Industrial robots are the cornerstone of intelligent manufacturing, but the core components restrict the development of China’s robot industry. According to relevant surveys, the current domestic robot reducers generally rely on imports. For the robot industry to thrive in China, it is essential to decisively resolve the issues surrounding core components.
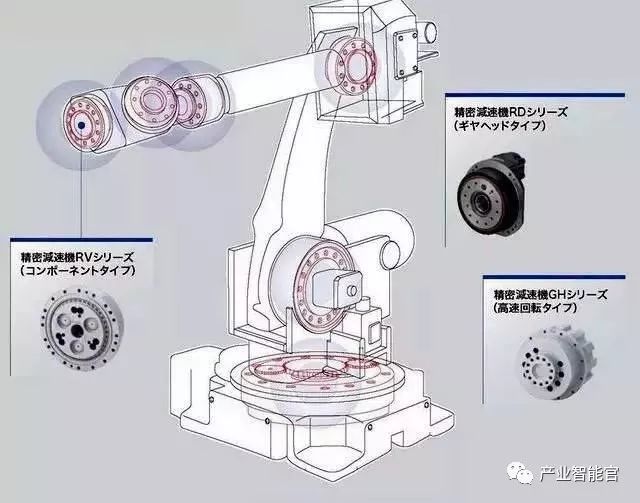
Next, we introduce the core precision components of industrial robots: reducers. Compared to general reducers, robot reducers are required to have characteristics such as short transmission chains, small volume, high power, light weight, and ease of control. In the reducer industry, we must mention two giants: Nabtesco (also known as Nabtesco) and Hamonica Drive (Hamonica), commonly referred to as RV reducers and harmonic reducers. They almost monopolize the global market for robot reducers. Both types of reducers have micron-level processing accuracy, which is challenging to achieve reliably during mass production, especially at high speeds of thousands of revolutions, while also ensuring high lifespan. The majority of reducers currently used in industrial robots fall into two categories: RV reducers and harmonic reducers.
RV Reducers: They use low-tooth differential engagement, but compared to harmonic reducers, RV reducers typically use cycloidal pin wheels, consisting of cycloidal pin wheels and planetary brackets. The key to RV reducers lies in processing and assembly technology. RV reducers have higher fatigue strength, rigidity, and lifespan, unlike harmonic drives, which significantly reduce motion accuracy over time. Their disadvantage is that they are relatively heavy and larger in size. RV reducers are used in the joints of robots with large torque, such as the legs, waist, and elbows, and large-load industrial robots use RV reducers for the first three axes.
They have much higher fatigue strength, rigidity, and lifespan compared to the commonly used harmonic drives in robots, and the backlash accuracy remains stable, unlike harmonic drives that significantly reduce motion accuracy over time. Therefore, many countries worldwide prefer RV reducers for high-precision robot drives, leading to a trend of RV reducers gradually replacing harmonic reducers in advanced robot drives.
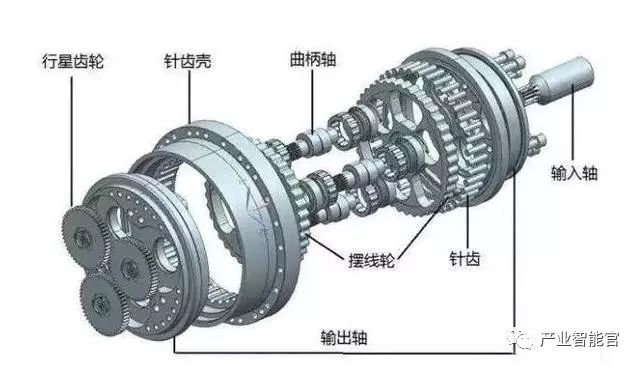
RV Reducer Decomposition Diagram
Harmonic Reducers: They also use low-tooth differential engagement, where a key gear in the harmonic drive is flexible and requires repeated high-speed deformation, making it relatively fragile with limited load capacity and lifespan.
Harmonic reducers are a type of harmonic transmission device, including harmonic accelerators and harmonic reducers. A harmonic reducer mainly consists of a rigid wheel, a flexible wheel, and a wave generator that undergoes radial deformation. It utilizes flexible gears to create controllable elastic deformation waves, causing the rigid and flexible wheels to intermesh and transmit power and motion. This transmission differs fundamentally from general gear transmissions, having unique characteristics in engagement theory, aggregate calculation, and structural design. Harmonic gear reducers offer advantages such as high precision and high load capacity. Compared to ordinary reducers, they use 50% less material, reducing their volume and weight by at least one-third. Therefore, harmonic reducers are mainly used in small robots, characterized by small size, light weight, high load capacity, and high motion accuracy, with large single-stage transmission ratios. They are generally used in small-load industrial robots or in the final axes of large robots.
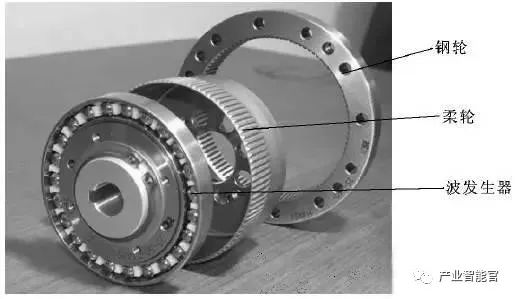
Harmonic Reducer Decomposition Diagram
Japan’s Nabtesco company proposed the RV-type design in the early 1980s, and substantial breakthroughs in RV reducer research were achieved in 1986, taking 6-7 years. Meanwhile, domestic companies such as Nantong Zhenkang and Hengfengtai also took 6-8 years to achieve results. Does this mean that domestic enterprises have no opportunities? Fortunately, after several years of layout, Chinese companies have finally made some breakthroughs. Major domestic suppliers include Nantong Zhenkang, Qinchuan Machine Tool, Wuhan Jinghua, Zhejiang Hengfengtai, and Zhejiang Shuanghuan Transmission. It is said that Nantong Zhenkang’s output has exceeded 10,000 units, and Qinchuan Machine Tool’s production line has been opened, with output gradually increasing. The Qinchuan Machine Tool project is a national import substitution project, with a total investment of 314 million yuan for the technology transformation project of 90,000 sets of industrial robot joint reducers and the production line for industrial robot joint reducers.
Control System
The robot control system is the brain of the robot, determining its functionality and capabilities. The control system issues command signals to the drive system and actuating mechanism based on the input program and performs control. The following article mainly introduces the robot control system.
1. Robot Control System
The purpose of “control” is to ensure that the controlled object behaves as expected. The basic condition for “control” is to understand the characteristics of the controlled object.
The essence is to control the output torque of the driver. The robot’s control system
2. Basic Working Principle of Robots
The working principle is teaching and reproduction; teaching, also known as guided teaching, involves manually guiding the robot through the actual required motion process step by step. The robot automatically memorizes each action’s posture, position, process parameters, motion parameters, etc., during the guidance process, generating a continuous executable program automatically. Upon completion of teaching, only a start command is needed for the robot to automatically complete the entire process according to the taught actions;
3. Classification of Robot Control
1) Based on feedback, it can be classified into: open-loop control and closed-loop control,
The conditions for precise open-loop control: knowing the model of the controlled object accurately, and this model remains unchanged during the control process.
2) Based on expected control quantities, it can be classified into: force control, position control, and hybrid control.
Position control can be divided into: single-joint position control (position feedback, position-speed feedback, position-speed-acceleration feedback) and multi-joint position control.
Multi-joint position control can be divided into decomposed motion control and centralized control, while force control can be divided into: direct force control, impedance control, and force-position hybrid control.
3) Intelligent control methods
Fuzzy control, adaptive control, optimal control, neural network control, fuzzy neural network control, and expert control.
4. Hardware Configuration and Structure of the Control System: Electrical hardware, software architecture
Due to the large number of coordinate transformations and interpolation calculations involved in the robot’s control process, as well as lower-level real-time control, most robot control systems on the market adopt a layered structure of microcomputer control systems, typically using a two-level computer servo control system.
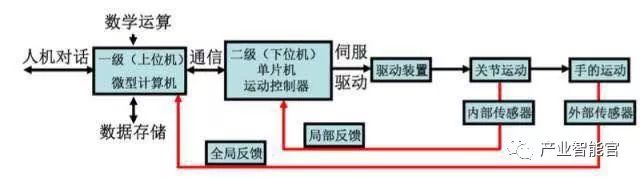
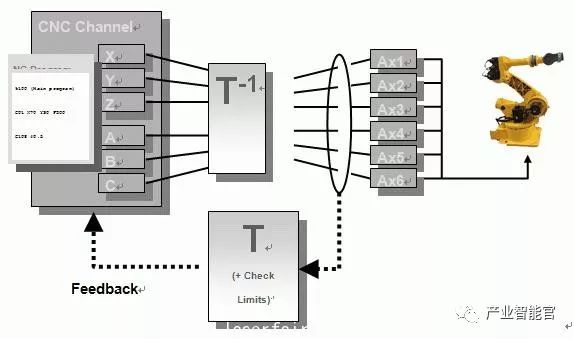
1) Specific Process:
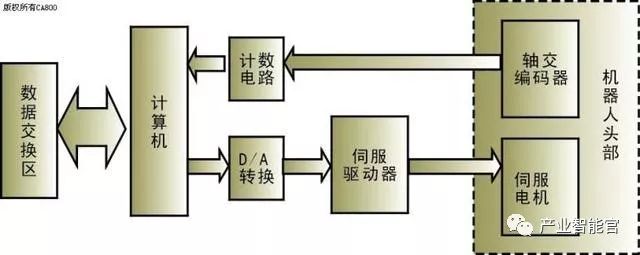
The main control computer receives the work instructions input by the staff, analyzes and interprets the instructions, and determines the motion parameters of the hand. Then, it performs kinematic, dynamic, and interpolation calculations, ultimately deriving the coordinated motion parameters for each joint of the robot. These parameters are output to the servo control level through communication lines as the given signals for each joint’s servo control system. The servo driver on the joints converts this signal from D/A to drive the joints to produce coordinated motion.
The sensors feed back the output signals of each joint’s motion back to the servo control level computer, forming a local closed-loop control to achieve precise control of the robot’s motion in space.
2) Motion Control Based on PLC: Two control methods:
① Using the output port of the PLC to generate pulse commands to drive the motors, while using general I/O or counting components to achieve closed-loop position control of the servo motors.
② Using external position control modules to achieve closed-loop position control of the motors. This method mainly generates high-speed pulse control and belongs to position control, which is generally more common in point-to-point position control.
Important Parameters of Robots
This article focuses on the technical parameters of industrial robots, with detailed graphic descriptions, hoping to assist everyone!
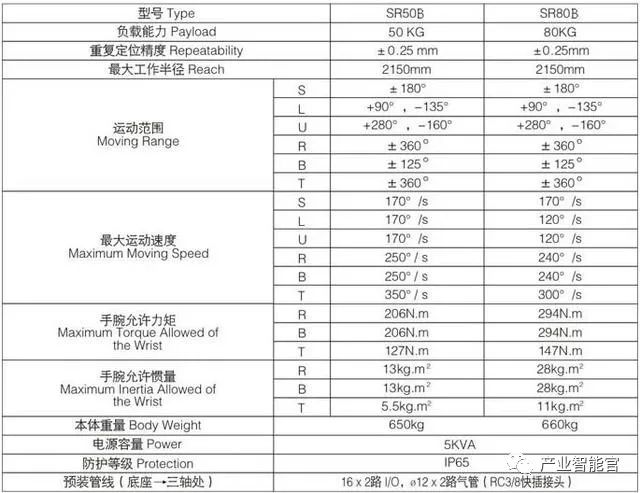
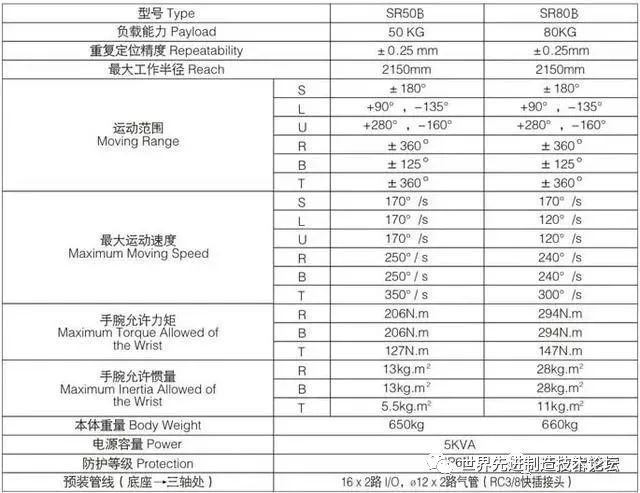
The technical parameters of robots reflect the work they can perform and their highest operating performance, which are essential considerations in designing and applying robots. The main technical parameters of robots include degrees of freedom, resolution, workspace, working speed, and payload.
1. Degrees of Freedom
Refers to the number of independent motion coordinate axes the robot possesses.
The degrees of freedom of a robot refer to the number of independent motion parameters required to determine the position and posture of the robot’s hand in space. The number of degrees of freedom of a robot generally equals the number of joints.
Common robots typically have 5 to 6 degrees of freedom. Some robots also have additional external axes.
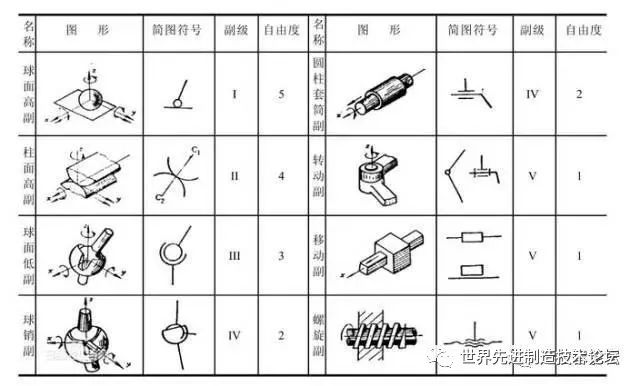
2. Joints
Refers to the moving pairs that allow relative motion between the various components of the robot arm.
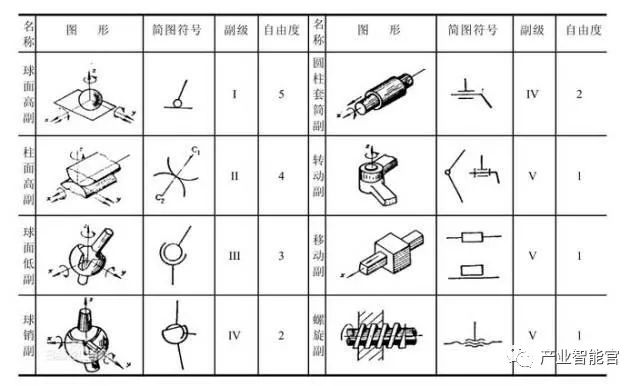
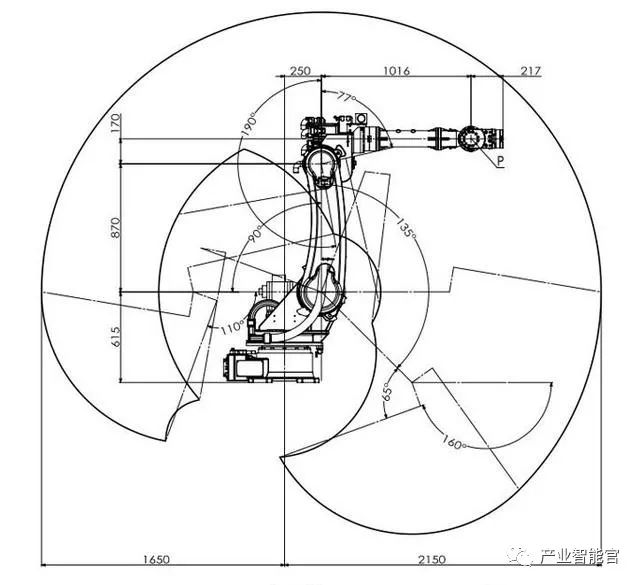
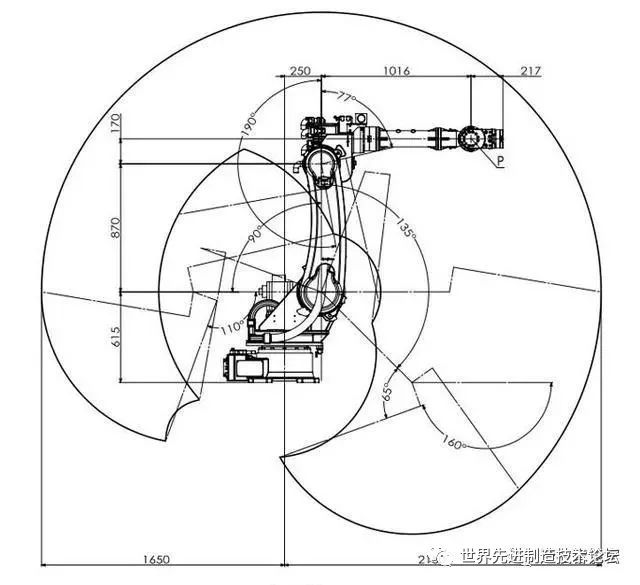
3. Working Range
Refers to the entire spatial range that the robotic arm or end effector can reach.
The shape of the working range depends on the number of degrees of freedom of the robot and the types and configurations of its moving joints. The working range of a robot can be represented using diagrammatic and analytical methods.
4. Speed
Refers to the distance moved or angle rotated by the mechanical interface center or tool center point per unit time during the robot’s working process under load conditions and at a constant speed.
5. Payload
Refers to the maximum weight that the load at the front end of the robot’s wrist can bear at any position within the working range, typically expressed in terms of mass, torque, and moment of inertia.
It is also related to parameters such as operating speed and acceleration. The payload is generally indicated by the weight of the workpiece that the robot can grasp during high-speed operation.
For handling robots, the total weight of the gripper and workpiece must be considered.

6. Resolution
Refers to the minimum movement distance or minimum rotation angle that the robot can achieve.
7. Precision
Refers to the repeatability or repeat positioning accuracy: the difference in reaching a specific target position multiple times. For example, if you require an axis to move 100 mm, but the first time it actually moves 100.01 and the second time it moves 99.99, the error of 0.02 is the repeat positioning accuracy. It measures the concentration of a series of error values, i.e., repeatability. The precision of the robot not only depends on the joint reducer and transmission device but also has a significant relationship with the mechanical assembly process. Many issues arise from improper assembly, leading to a decline in the robot’s repeat positioning accuracy.
Important Parameters of Robots
This article focuses on the technical parameters of industrial robots, with detailed graphic descriptions, hoping to assist everyone!
The technical parameters of robots reflect the work they can perform and their highest operating performance, which are essential considerations in designing and applying robots. The main technical parameters of robots include degrees of freedom, resolution, workspace, working speed, and payload.
1. Degrees of Freedom
Refers to the number of independent motion coordinate axes the robot possesses.
The degrees of freedom of a robot refer to the number of independent motion parameters required to determine the position and posture of the robot’s hand in space. The number of degrees of freedom of a robot generally equals the number of joints.
Common robots typically have 5 to 6 degrees of freedom. Some robots also have additional external axes.
2. Joints
Refers to the moving pairs that allow relative motion between the various components of the robot arm.
3. Working Range
Refers to the entire spatial range that the robotic arm or end effector can reach.
The shape of the working range depends on the number of degrees of freedom of the robot and the types and configurations of its moving joints. The working range of a robot can be represented using diagrammatic and analytical methods.
4. Speed
Refers to the distance moved or angle rotated by the mechanical interface center or tool center point per unit time during the robot’s working process under load conditions and at a constant speed.
5. Payload
Refers to the maximum weight that the load at the front end of the robot’s wrist can bear at any position within the working range, typically expressed in terms of mass, torque, and moment of inertia.
It is also related to parameters such as operating speed and acceleration. The payload is generally indicated by the weight of the workpiece that the robot can grasp during high-speed operation.
For handling robots, the total weight of the gripper and workpiece must be considered.

6. Resolution
Refers to the minimum movement distance or minimum rotation angle that the robot can achieve.
7. Precision
Refers to the repeatability or repeat positioning accuracy: the difference in reaching a specific target position multiple times. For example, if you require an axis to move 100 mm, but the first time it actually moves 100.01 and the second time it moves 99.99, the error of 0.02 is the repeat positioning accuracy. It measures the concentration of a series of error values, i.e., repeatability. The precision of the robot not only depends on the joint reducer and transmission device but also has a significant relationship with the mechanical assembly process. Many issues arise from improper assembly, leading to a decline in the robot’s repeat positioning accuracy.
Jinan CNC Mold Technology Research Institute
The Job Training Base for College Graduates——Jinan CNC Mold Technology Research Institute has been mainly conductingCAD/CAM advanced programming, UG five-axis programming, CNC machine tool maintenance, UG mold design, reverse modeling, industrial robots, 3D printing, etc. pre-employment training for many years. One-time registration for lifetime learning, during the training period, teachers conduct phased tests to fully control students’ learning progress, small class teaching, one-on-one tutoring, combining theory and practice until mastery, and free job placement after completion. The research institute provides long-term technical support and employment services for students. All teachers and students of the Jinan CNC Mold Technology Research Institute welcome your visit and learning, and the institute is currently located at 2510, Century Avenue, Zhangqiao District, Jinan City.
Consultation Hotline: 0531-85708996
At Jiyan | Learn Skills | Read Life
Insights | Learning | Communication