📸Comprehensive Analysis of 1200W Pixel Cameras + MIPI Lane Calculation Tutorial 💡
Have you received a “1200W pixel” camera and are unsure how many MIPI lanes to configure? Or are you worried when selecting a chip: are 2 lanes enough? Is 4 lanes excessive? Don’t worry! Today, we will guide you step by step from principles to formulas! 🎯
🔍 I. What is a 1200W Pixel Camera?
🧠 “1200W pixels” = 12 million pixels The common resolution configurations are as follows:
| Type | Resolution |
|---|---|
| Common Format | 4000 × 3000 |
| Wider Exposure Version | 4032 × 3024 (12.2MP) |
🧠 II. How to Calculate MIPI Lane Count? How Many Lanes Do You Need?
We will use the following set of “Three Axes” formulas to solve it!
📐 First Axis: Calculate Total Pixel Clock Frequency
Using the formula:
f_pixel = resolution × frame rate × Blanking overhead factorFor example: 4000 × 3000 @30fps, Overhead taken as 1.15:

💾 Second Axis: Calculate Total Data Rate
Assuming the output format is RAW10 (10 bits/pixel), then:

🔧 Notes:
- RAW10: 10 bits per pixel
- If using formats like YUV422, please switch to the corresponding bit count!
🚀 Third Axis: Calculate How Many MIPI Lanes Are Needed
Based on the rate supported by the MIPI PHY (e.g., 1.5Gbps/Lane, effective ≈ 1.2Gbps), we divide:

✅ Conclusion: At least 4 MIPI Data Lanes (+1 Clock Lane)
⚙️ III. Revealing the Principle Block Diagram 🧩
Let’s take a look at a typical schematic framework:👇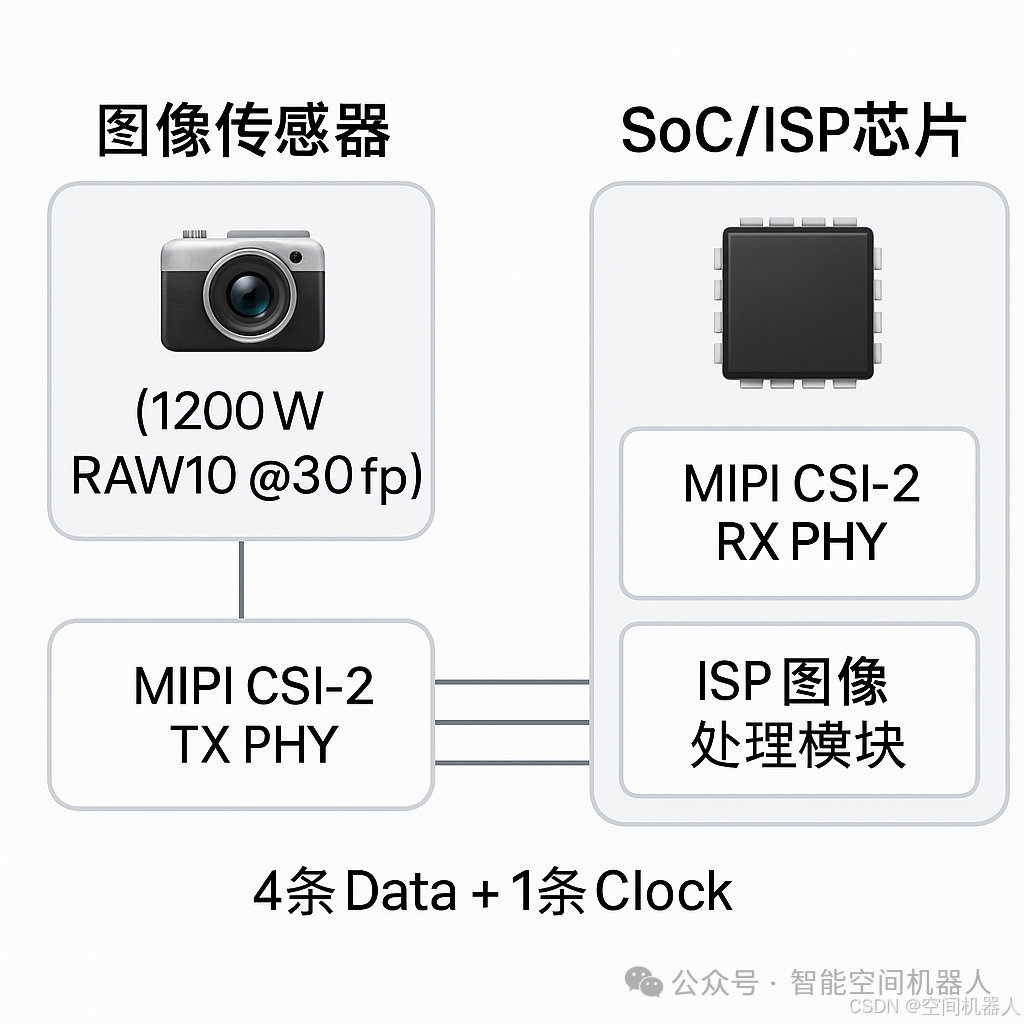
🧮 IV. An Advanced Example: How Many Lanes for a 4K@60fps Camera?
- Resolution: 3840×2160
- Frame Rate: 60fps
- Format: RAW10
- Overhead: 1.2
Calculate the data rate:
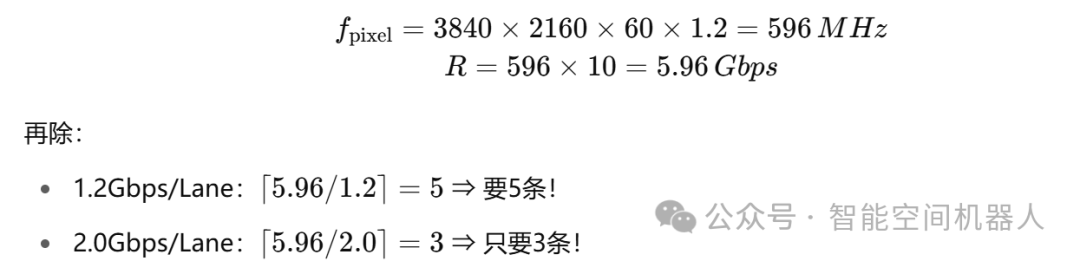
🎯 Optimization Tip: Choose a high-frequency MIPI PHY (e.g., 2.5Gbps) to reduce wiring and save BOM costs!
📌 V. Summary of Tips
| Item | Recommended Configuration |
|---|---|
| 1200W @30fps RAW10 | 4 Data Lanes |
| 1200W @60fps RAW10 | At least 6 (or high frequency) |
| RAW8 Format | Data volume reduced by 20%, fewer lanes can be used |
| Multi-Camera Synchronization Scheme | Can use multiple sets of MIPI or VC channels |
🚗 Practical Scenario Example: ADAS Camera Design
In Advanced Driver Assistance Systems (ADAS), such as 360-degree surround view and front-facing cameras, 1-2 1200W cameras are used:
- Front-facing: Used for lane keeping and front vehicle recognition, requiring 30-60fps
- Surround View: Multiple 1200W cameras stitch panoramic images, requiring low-latency transmission
📍 Design Recommendations:
- When selecting SoC, check if it supports 4-lane MIPI input
- During power design, separate MIPI power supply and sensor analog power supply
- Ensure differential signal routing is symmetrical, of equal length, and avoids interference
🎉 Final Summary in One Sentence:
No matter how many millions of pixels, the key is three steps: First calculate the data rate, then check the lane bandwidth, and finally divide to get the result! 🚀