Design of a Small Robotic Arm Based on Inverse Kinematics and Its Application in Grasping and Placing Tasks
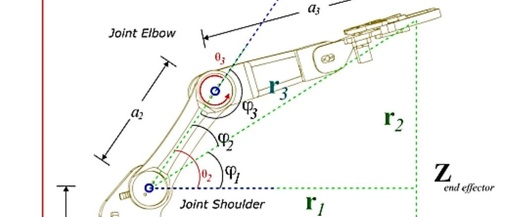
Abstract:Robotic arms are widely used in the industrial field, with grasping and placing being a common task. To promote the development of numerous industrial tasks, especially in laboratory environments, it is essential to quickly build robotic arm prototypes. This study aims to design a small three-degree-of-freedom robotic arm for grasping and placing tasks using inverse … Read more