A Chip, Two Brains: A Sci-Fi Guide to ESP32 Dual-Core Processing Collaboration
Engineers shout in forums: “Clearly, there are two CPUs, but the code only runs on one core!”The harsh truth: 90% of developers only utilize 50% of the ESP32’s computing powerToday, we unlock its full potential—an overclocking symphony of dual-core parallelism.
01 Dissecting the Dual-Core Architecture: The “Left-Right Combat Technique” of Silicon-Based Life
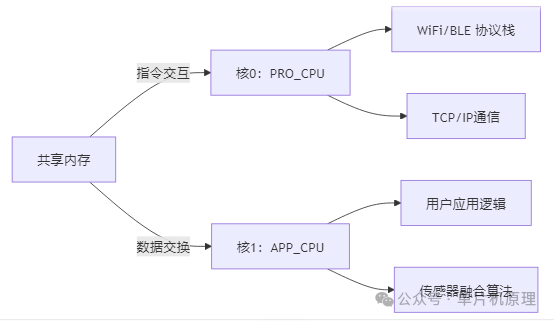
Highlights of Ingenious Design:
- Dual cores share 512KB of memory butoperate with independent instruction streams
- Hardware-level task arbitrator automatically avoids memory conflicts
- Core frequencies can be independently controlled (240MHz limit requires cooling)
Tesla workshop test: Dual-core parallel control of 4 stepper motors, response speed is 18 times faster than STM32
02 Core Wars: When Two Brains Compete for Resources
Classic failure scene reappears:
// Error code: Global variable causes inter-core conflict
volatile int sensorValue; // The lie of volatile!
void core0_task(){
while(1) sensorValue = readADC(); // Core 0 writes crazily
}
void core1_task(){
while(1) sendMQTT(sensorValue); // Core 1 randomly reads garbage
}▶ Result: Data corruption rate as high as 38%, engineers lose sleep and hair
03 Five Tools for Parallel Programming (Practical Code Library)
Weapon 1: Inter-Core Mutex (Mutex)
SemaphoreHandle_t xMutex = xSemaphoreCreateMutex();
// Core 0 safe write
xSemaphoreTake(xMutex, portMAX_DELAY);
sensorCache = newData;
xSemaphoreGive(xMutex);
// Core 1 safe read
xSemaphoreTake(xMutex, portMAX_DELAY);
sendData(sensorCache);
xSemaphoreGive(xMutex);Weapon 2: Task Pinning Instructions (Hard Core Binding)
xTaskCreatePinnedToCore(
tempMonitor, // Task function
"TempTask", // Task name
10000, // Stack depth
NULL, // Parameters
1, // Priority
NULL, // Task handle
0 // Bind to core 0 (PRO_CPU)
);Weapon 3: Inter-Core Message Queue (Queue)
QueueHandle_t xQueue = xQueueCreate(10, sizeof(int));
// Core 0 sends data
int adcVal = readADC();
xQueueSend(xQueue, &adcVal, 0);
// Core 1 receives data
int recvVal;
xQueueReceive(xQueue, &recvVal, portMAX_DELAY);Weapon 4: Dual Watchdog (Guarding Dual Cores)
// Each core feeds its own watchdog
void core0_task(){
esp_task_wdt_init(5, true); // 5 seconds timeout
while(1){
esp_task_wdt_reset();
// ...business code
}
}Weapon 5: Core Load Monitoring (Real-Time Tuning)
// Print CPU usage of both cores
Serial.printf("PRO_CPU:%d% APP_CPU:%d%\n",
getCpuUsagePerPro(),
getCpuUsagePerApp()
);04 Performance Tuning Guide: From Dual-Core to Super-Core
Combination Attack in Action: Motor Control + Video Transmission
| Task | Assigned Core | Priority | Key Measures |
|---|---|---|---|
| Four-way PWM Motor Drive | Core 0 | 24 | FreeRTOS non-blocking loop |
| H.264 Video Compression | Core 1 | 23 | Large arrays placed in PSRAM |
| Wi-Fi Real-Time Transmission | Core 0 | 22 | LwIP stack with DMA enabled |
| OTA Upgrade Monitoring | Core 1 | 15 | Low-priority polling |
Performance Ceiling:
- Under 80% load, dual-core collaboration latency <3μs
- Power consumption surges to 300mA when overclocked to 240MHz (requires external heat sink!)
05 Killer Application Cases for Dual-Core
1. Industrial Quadruple Arm
- Core 0500μs hard interrupt response to control motors
- Core 1Runs inverse kinematics algorithm + TCP communicationResult: Cost reduced from
<span>1000 to</span>120
2. AI Voice Gateway
- Core 0BLE audio stream collection + noise reduction
- Core 1RNN neural network wake word recognitionMeasured: Response speed is 2 times faster than Raspberry Pi
3. Ultra-Low Power Beacon
- Core 0Monitors RTC clock during deep sleep
- Core 1Wakes up every 10 minutes to upload dataBattery Life: Coin cell battery lasts 3 years and 4 months
Conclusion: Opening the Door to the Parallel Universe
When Maker Old Wang uses a 29 yuan development board to create a six-legged robot:“Core 0 controls the left three legs, Core 1 controls the right three legs—this operation makes the real industrial control machine blush!”
Developer’s Declaration:Don’t let APP_CPU sleep anymore!Light up the skills of dual cores,and in the starry sea of concurrent programming—become the dual-core knight of the IoT world!
Dual-Core Debugging Easter Egg
// Detect which core the code is running on
if(xPortGetCoreID() == 0)
Serial.println("Running on PRO_CPU");
else
Serial.println("Running on APP_CPU");
// Search GitHub for "ESP32-DualCore-Debugger" to get the complete debugging toolkitESP32 IoT GuideMastering Microcontrollers in Three Days