Following the previous two articles, we continue to work on navigation and obstacle avoidance for ground unmanned vehicles based on the RK3588 processor.
Implementation of Fast-LIO Robot SLAM Indoor Positioning Algorithm with RK3588, ROS2 Humble, EasyMQoS, and MID360
Visual Power DIY Machines, WeChat Official Account: Visual Power Robot – Implementation of Fast-LIO Robot SLAM Indoor Positioning Algorithm with RK3588, ROS2 Humble, EasyMQoS, and MID360
Implementation of Fast-LIO2 Robot SLAM Outdoor Positioning Algorithm and Important Data with RK3588, ROS2 Humble, EasyMQoS, and MID360
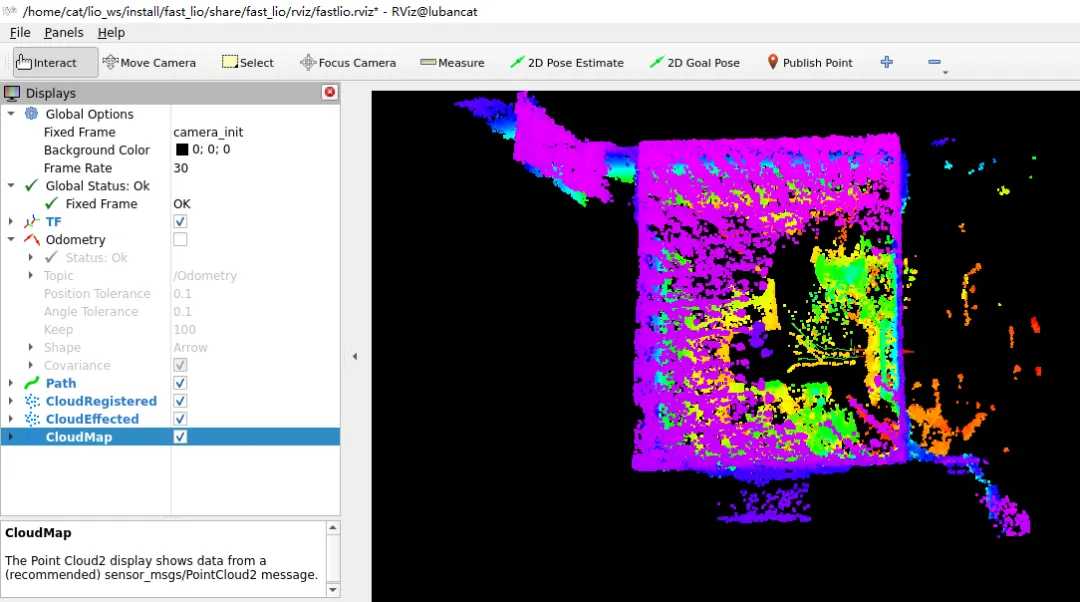
The previous two articles mentioned that the Fast-LIO2 SLAM mapping has been successfully implemented, and we can obtain the /odometry topic (nav_msgs::msg::Odometry) and cloud_registered (sensor_msgs::msg::PointCloud2)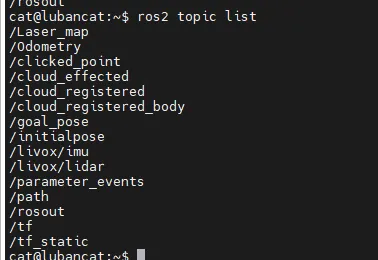
 Using octomap_server, we implemented the transformation of a 2D grid map,
Using octomap_server, we implemented the transformation of a 2D grid map,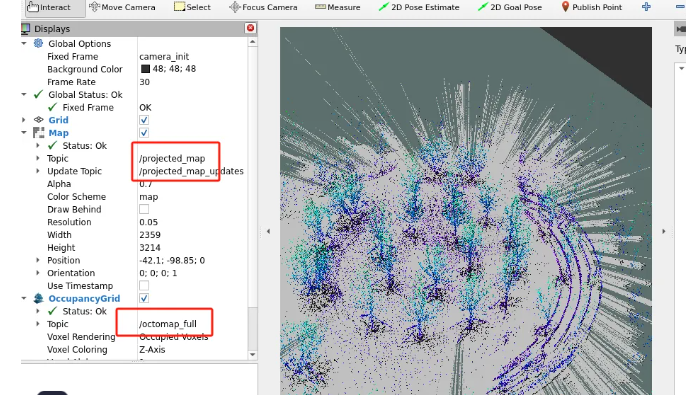 but the effectiveness has not been fully tested. Further modifications are needed. Since we previously used Ego-Planer, we decided to implement Ego-Planer on ROS2 Humble.Some modifications were referenced from articles by Shi Xiaohan and other experts.The content of this article is divided into:1. Ego-Planer Simulation Testing – Directly Observing the Results2. Writing advance.launch.py Script to Start Command Subscription for Fast-LIO2Key configurations:
but the effectiveness has not been fully tested. Further modifications are needed. Since we previously used Ego-Planer, we decided to implement Ego-Planer on ROS2 Humble.Some modifications were referenced from articles by Shi Xiaohan and other experts.The content of this article is divided into:1. Ego-Planer Simulation Testing – Directly Observing the Results2. Writing advance.launch.py Script to Start Command Subscription for Fast-LIO2Key configurations:
def generate_launch_description(): drone_id_ = "0" odometry_topic = "/Odometry" cloud_topic ="/cloud_registered" remappings=[ ('odom_world',odometry_topic), #('planning/bspline','planning/bspline'), #('planning/data_display',LaunchConfiguration('planning/data_display')), #('planning/broadcast_bspline_from_planner','/broadcast_bspline'), #('planning/broadcast_bspline_to_planner', '/broadcast_bspline'), ('grid_map/odom', odometry_topic), ('grid_map/cloud',cloud_topic), xxx ]3. Testing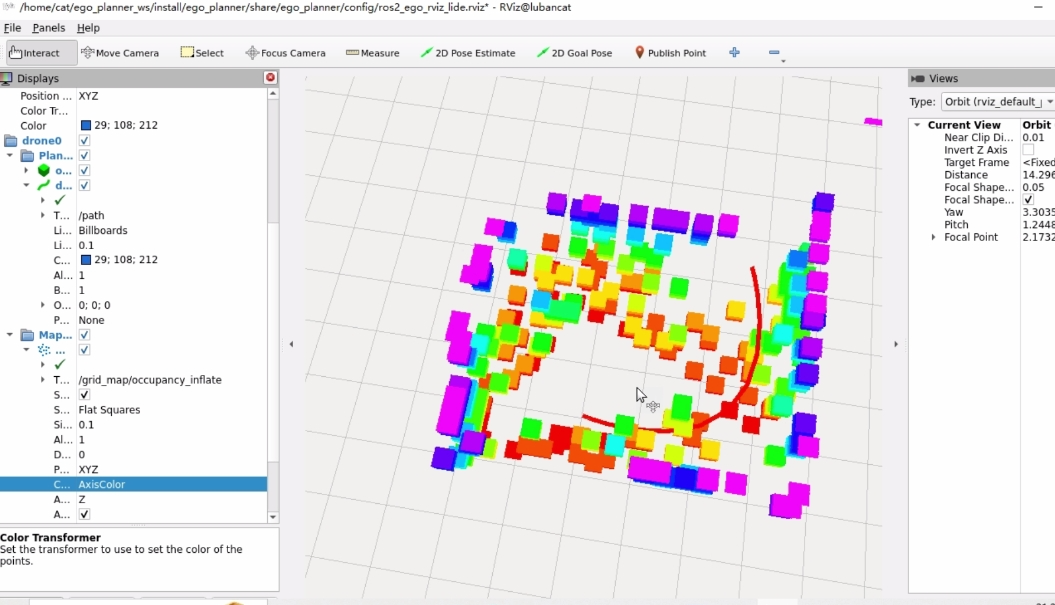 4. Pure Pursuit NavigationFind in traj_server.cpp
4. Pure Pursuit NavigationFind in traj_server.cpp
//g North China Dog King Schemevoid cmdCallback() {}Internally add
//puresuit by lide float rad= atan2(pos_tart[1]-pos_now[1], pos_tart[0]-pos_now[0]); float alpha = rad - _gYaw; printf("************************************************alpha:%.3f \n",alpha); if (alpha < -M_PI) alpha = alpha + 2 * M_PI ; else if(alpha > M_PI) alpha = alpha - 2 * M_PI; printf("heading:%.1f,target:%.1f,alpha:%f \n",_gYaw*180/M_PI,rad*180/M_PI,alpha*180/M_PI); float v =0.1; float w = P * 2*v*sin(alpha)/sqrt(dis); if(fabs(w)>0.1 && w>0) w =0.5; else if(fabs(w)>0.1 && w<0) w =-0.5;The theoretical basis comes from “Programming Practice for Wheeled Autonomous Mobile Robots”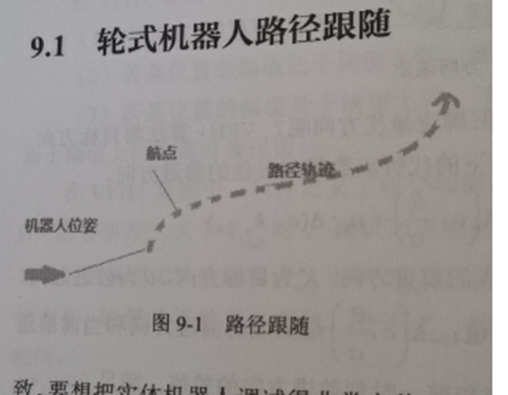 ConclusionWe welcome friends to purchase. We also welcome interested parties to invest or collaborate; please contact the author through the backend. More solutions and technical content will be released in the future.
ConclusionWe welcome friends to purchase. We also welcome interested parties to invest or collaborate; please contact the author through the backend. More solutions and technical content will be released in the future.