Guide to Choosing C++ Robot Development Frameworks: A Comprehensive Comparison of ROS2 and Other Frameworks
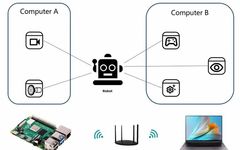
Guide to Choosing C++ Robot Development Frameworks: A Comprehensive Comparison of ROS2 and Other Frameworks In the field of robot development, C++ has become the preferred language due to its high performance and low-level control capabilities. However, developers often find themselves confused by the numerous framework options available. As the “next-generation standard” for robot development, … Read more