 In an exciting racing competition held in Toulouse, Antonin Raffin and his friends successfully designed and programmed an autonomous racing robot. This robot is powered by Raspberry Pi, Arduino Uno, and Pi camera, utilizing Python, C++, and neural network technology to achieve real-time image processing with an astonishing operating speed of 60 frames per second. Antonin Raffin and his friends hope to share their design experience in detail through this article, including the steps for labeling and technical details, and provide key technical information to help other enthusiasts replicate this racing robot. They have generously made the 3D models, source code, and datasets used for training the robot publicly available. It is worth mentioning that reading this article does not require specialized knowledge in machine learning, but readers interested in the details of image processing and data labeling methods may gain a deeper understanding of the related content.
In an exciting racing competition held in Toulouse, Antonin Raffin and his friends successfully designed and programmed an autonomous racing robot. This robot is powered by Raspberry Pi, Arduino Uno, and Pi camera, utilizing Python, C++, and neural network technology to achieve real-time image processing with an astonishing operating speed of 60 frames per second. Antonin Raffin and his friends hope to share their design experience in detail through this article, including the steps for labeling and technical details, and provide key technical information to help other enthusiasts replicate this racing robot. They have generously made the 3D models, source code, and datasets used for training the robot publicly available. It is worth mentioning that reading this article does not require specialized knowledge in machine learning, but readers interested in the details of image processing and data labeling methods may gain a deeper understanding of the related content.
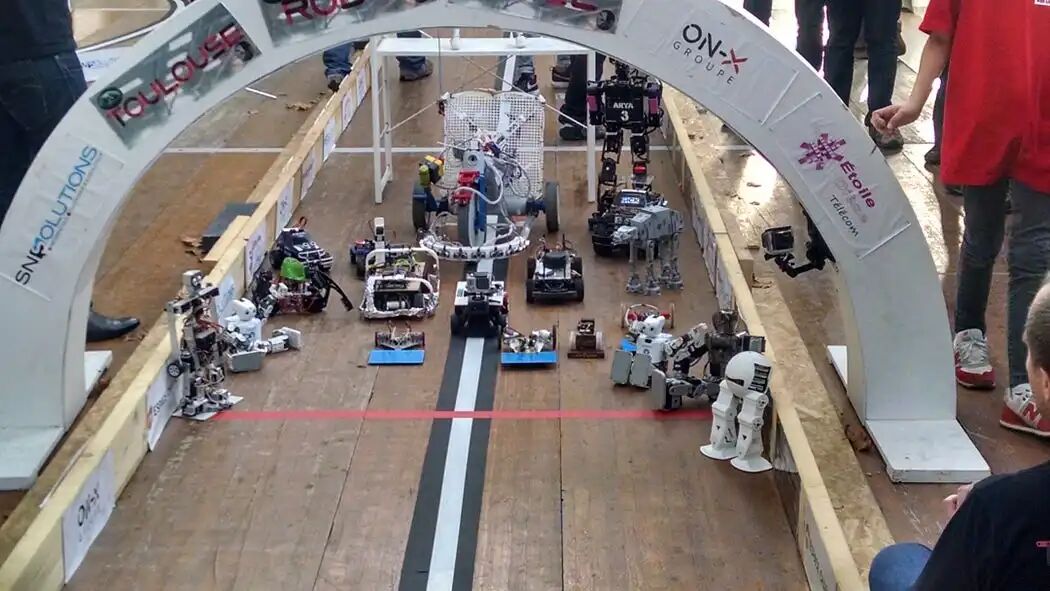
The article first showcases the performance of the racing robot in an actual competition, followed by a brief introduction to the background of robot racing, and a detailed description of the main hardware and software components of the racing car. Next, Antonin Raffin and his friends delve into the internal workings of the robot, including the steps for labeling and technical details, specifically demonstrating how they used technical means to enable the racing car to achieve autonomous driving.
Competition Background and Design Intent
This robot racing competition held in Toulouse attracted numerous tech enthusiasts and engineering teams. Participants were required to design a racing robot capable of autonomously navigating the track, which was filled with straight lines and curves, testing the robot’s speed and stability. Antonin Raffin and his friends aimed not only to complete the competition but also to explore the applications of computer vision and control systems in the field of robotics through this project. They hoped to accumulate valuable experience by developing this racing robot while also providing a reference case for other robotics enthusiasts.
 Hardware and Software Components
Hardware and Software Components
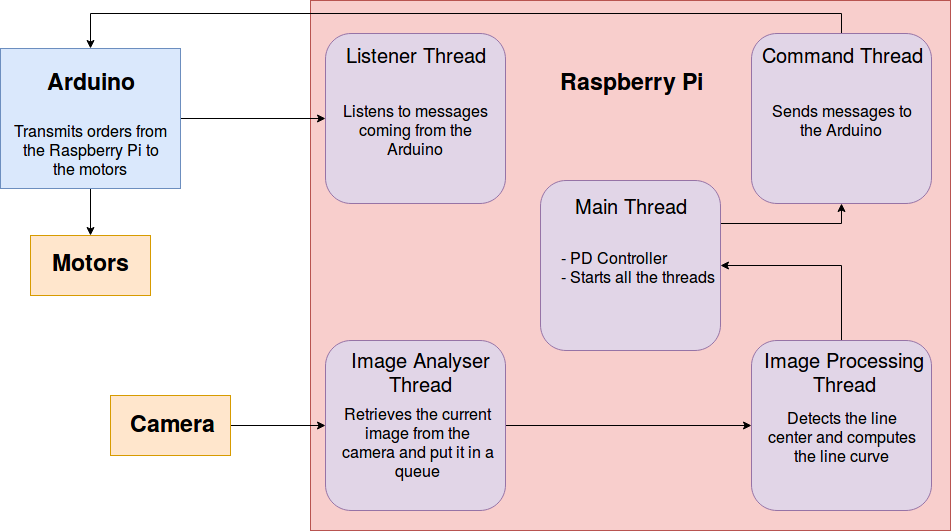
The core hardware of this racing robot includes Raspberry Pi, Arduino Uno, and Pi camera. Raspberry Pi serves as the main computing unit, responsible for processing images and executing control algorithms. The Pi camera is mounted at the front of the racing car to capture real-time images of the track. Arduino Uno is responsible for communicating with Raspberry Pi and sending direction and speed commands to the car’s motors via pulse-width modulation, ensuring the car can adjust its driving state based on the computed results.
On the software side, Antonin Raffin and his friends developed using Python and C++. Python is primarily used for image processing and control logic on Raspberry Pi, while C++ is used for the low-level control program on Arduino. Additionally, they introduced neural network technology to optimize track line detection and path planning. Through the collaborative work of these hardware and software components, the racing robot can achieve autonomous navigation on the track.
Image Processing and Track Detection
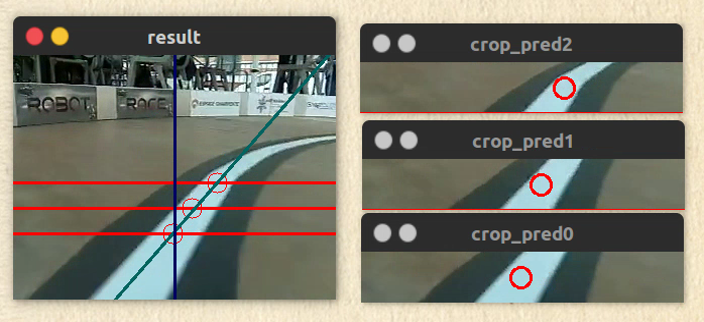
To enable the racing robot to accurately identify the track and follow the track line, Antonin Raffin and his friends developed a computer vision-based track detection system. The Pi camera captures 60 frames of images per second, which are transmitted to Raspberry Pi for real-time processing. The first step in processing is to preprocess the images, such as adjusting brightness and contrast, to ensure that the track lines can be clearly identified under different lighting conditions. Next, they used edge detection algorithms combined with color filtering techniques to extract the contours of the track lines.

To improve detection robustness, Antonin Raffin and his friends also conducted random jitter tests on the input images to simulate lighting changes or uneven track surfaces that might be encountered during the competition. Through this method, they ensured the algorithm’s stability in various complex scenarios. Furthermore, they trained a neural network to learn the features of the track lines, further enhancing detection accuracy.
Labeling Steps and Technical Details
Training the neural network requires a large amount of labeled data, so Antonin Raffin and his friends invested significant effort into completing the labeling process. They first used the Pi camera to capture a large number of track images under different lighting and angles, covering straight lines, curves, and various possible track conditions. Next, they manually labeled the position of the track lines in each image, including the boundaries and centerline positions. To improve efficiency, they developed a simple labeling tool that allows users to quickly draw the contours of the track lines through a graphical interface and save the labeling results as data files.
In terms of technical details, they adopted a semi-automated labeling method. By pre-training a simple edge detection model, the model could initially identify the position of the track lines, and then manual corrections were made to ensure accuracy. This method significantly reduced the workload of manual labeling while maintaining data reliability. They also divided the labeled data into training, validation, and test sets to avoid overfitting and ensure the model’s generalization ability in different scenarios. Additionally, they recorded the speed and direction information corresponding to each image as extra training features to help the model better predict control commands.
 Control Strategy and Simulation Testing
Control Strategy and Simulation Testing
Based on the track line detection and labeled data, Antonin Raffin and his friends designed a controller to guide the racing car along the track. The core logic of the controller is to predict the turning positions based on the geometric shape of the track lines. When the racing car is on a straight track, the controller instructs the car to move at maximum speed; as it approaches a curve, the controller slows down in advance and adjusts the direction to ensure the car can smoothly navigate the turn.
To validate the effectiveness of the computer vision algorithms, labeled data, and control strategies, Antonin Raffin and his friends developed a simulator using Blender and Python. This simulator can generate realistic track scenes and allows them to test the performance of the racing car in a virtual environment. The test results showed that the racing car could follow the track line well in the simulated environment, maintaining stability even at high frame rates. These simulation tests laid a solid foundation for deployment in actual competitions.
 Hardware Communication and Optimization
Hardware Communication and Optimization
The communication between Raspberry Pi and Arduino is a key aspect of the racing robot’s operation. After completing image processing and path planning, Raspberry Pi sends the computed direction and speed commands to Arduino. Upon receiving the commands, Arduino controls the motor’s speed and direction through pulse-width modulation, driving the racing car along the intended path. To ensure the real-time and reliability of communication, Antonin Raffin and his friends optimized the communication protocol, reducing latency and adding error-checking mechanisms.
 Actual Performance and Experience Summary
Actual Performance and Experience Summary
In the competition in Toulouse, this racing robot demonstrated excellent performance. It was able to not only drive steadily on the track but also achieve high speeds on straight sections and make precise turns at curves. Ultimately, the racing car successfully completed the competition, proving the feasibility and reliability of Antonin Raffin and his friends’ design scheme and labeling process.
The process of developing this autonomous racing robot has greatly benefited Antonin Raffin and his friends. They gained a deep understanding of the practical applications of computer vision, data labeling, and control systems, and accumulated experience in solving complex problems through practice. They hope to share their development journey with more robotics enthusiasts through this article, inspiring others to innovate and practice based on their work.
 Resource Sharing and Communication
Resource Sharing and Communication
To support other enthusiasts in replicating this racing robot, Antonin Raffin and his friends have made the 3D models, source code, and training datasets publicly available. They encourage readers to attempt building their own racing robots after reading the article and to explore more possibilities through practice. If readers have any questions, suggestions, or find errors in the article, Antonin Raffin and his friends welcome everyone to communicate with them through comments. They emphasize that sharing is a manifestation of care and hope this article can inspire learners in the fields of robotics and computer vision.
Through the development of this autonomous racing robot, Antonin Raffin and his friends have demonstrated how to achieve complex autonomous navigation tasks using limited hardware resources and a well-designed labeling process. Their experience is not only applicable to robot competitions but also provides valuable references for automation projects in other fields.