
 Today, fieldbus systems have become an integral part of real-time distributed control, which is an effective way to enhance the safety of control and monitoring production processes. Choosing the right communication technology is crucial in the early stages of project development, as it determines whether control performance can directly reach the field level and the range of available devices.
Today, fieldbus systems have become an integral part of real-time distributed control, which is an effective way to enhance the safety of control and monitoring production processes. Choosing the right communication technology is crucial in the early stages of project development, as it determines whether control performance can directly reach the field level and the range of available devices.
Although traditional fieldbus systems (such as PROFIBUS, CANopen, DeviceNet, SERCOS, etc.) can provide safe and fast data transmission to some extent, they do not match the speed, overall productivity, reliability, and real-time transmission considerations of EtherCAT technology. The emergence of EtherCAT helps to break through the bottlenecks of traditional fieldbus systems, as it allows for direct data exchange with applications using shared memory, requiring only standard network adapters to meet the needs without additional hardware.
EtherCAT: Ethernet for Control Automation Technology
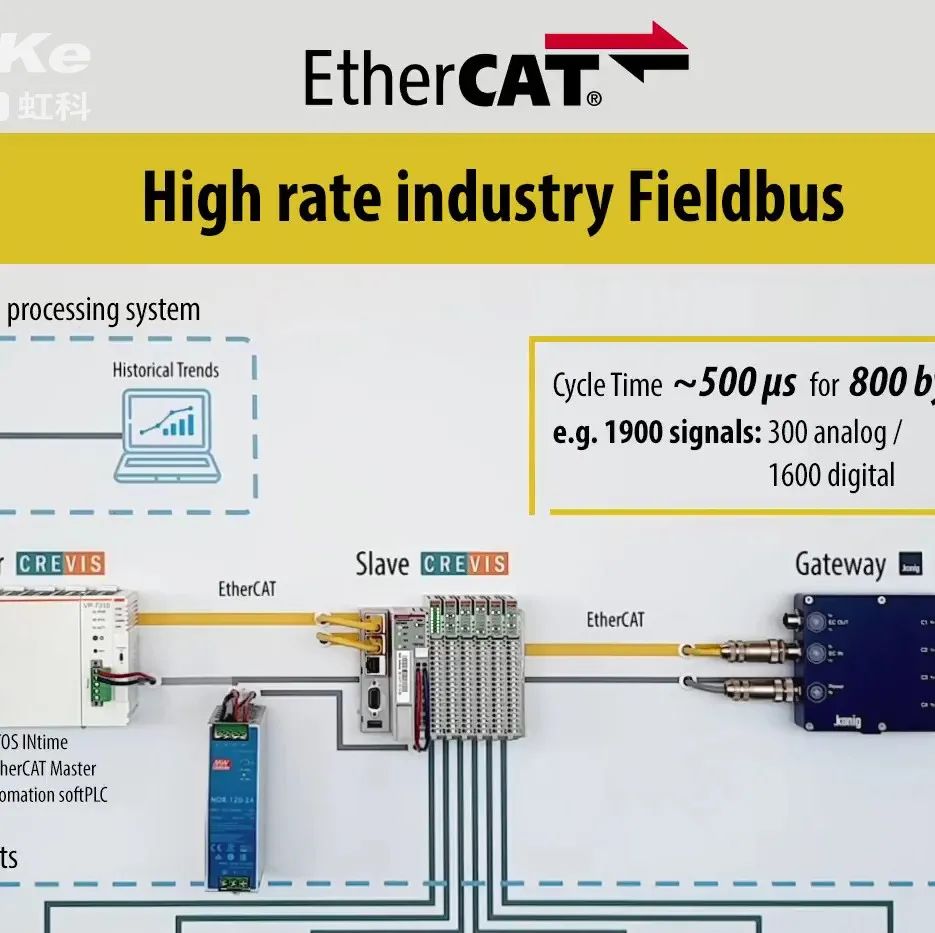
EtherCAT (Ethernet for Control Automation Technology) is a hard real-time technology that enables specific data transmission. It provides real-time performance and is designed to maximize high-speed full-duplex Ethernet data transmission through twisted pair or fiber optic cables to meet industrial process control requirements.Based on Ethernet technology, EtherCAT has advantages such as ease of implementation, cost-effectiveness, and standardization, making it the perfect solution for industrial applications aimed at maximizing control system performance. The media access control of this technology adopts a master/slave principle, where the master node (usually the control system) sends Ethernet frames to slave nodes, which dynamically extract and insert data from these frames.
How EtherCAT Technology Works
From the perspective of Ethernet, the EtherCAT part can be viewed as a single Ethernet device that receives and sends standard ISO/IEC802-3 Ethernet frames. This Ethernet device may consist of numerous EtherCAT slave devices that directly process incoming frames, extracting relevant user data or inserting data and forwarding the frames to the next EtherCAT slave device. The last EtherCAT slave device in the segment will return the fully processed frame so that the first slave device can respond back to the master device.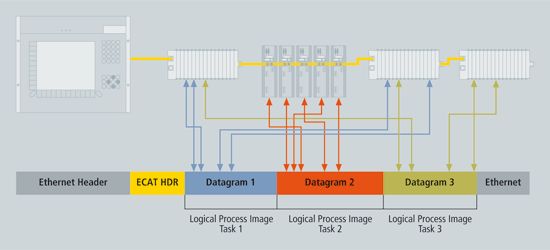
This process utilizes the full-duplex mode of Ethernet, allowing for independent two-way communication, enabling direct communication between the master device and the EtherCAT segment composed of one or more slave devices without the need for switching, reflecting the flexibility of EtherCAT’s operational principles.
Advantages
Core Features of EtherCAT
NO.1 Flexible Topology
The EtherCAT network can support up to 65,535 devices and has no restrictions on its topology, allowing for various configurations such as linear, tree, and star topologies.
NO.2 High Performance
Due to the specific functions of the EtherCAT protocol and its flexibility in topology and digital mapping, this high-performance technology can significantly enhance productivity. For example, through Direct Memory Access (DMA), data can be transmitted with minimal CPU usage, allowing slaves to read and write data themselves, with only one message returned to the master for processing, thereby freeing up master resources.
NO.3 Low Cost
EtherCAT is a real-time industrial Ethernet technology that does not require special plug-in cards for the master or co-processor, nor does it require significant processing power. The only requirement for connection is this standard Ethernet protocol, which does not depend on hubs and switches.
NO.4 Easy Integration
It can be integrated with fieldbuses and industrial Ethernet through gateways such as CAN, CANopen, EtherNET/IP, or through third-party tools like Mailbox over UDP and Mailbox over TCP.
To help project developers quickly implement EtherCAT-based solutions, Hongke has launched various EtherCAT development solutions, including the Hongke KPA EtherCAT Master protocol stack, which provides network device interaction with IPC systems, and the Hongke KPA EtherCAT Studio for creating and modifying EtherCAT network configurations.
Hongke KPA EtherCAT Master Protocol Stack
Helps you quickly develop EtherCAT functionality
The Hongke KPA EtherCAT Master protocol stack ensures all the advantages of EtherCAT technology: short cycle times, high performance, low cost, etc. Its core is implemented in ANSI “C”; therefore, it can be easily ported to any platform with a “C” compiler. It can even run as a module in the Linux kernel space (in contrast to C++ implementations, where C++ code may encounter difficulties when loading kernel modules if it uses features such as virtual functions, templates, or exceptions).The Hongke KPA EtherCAT Master adopts a modular architecture design, providing portability and scalability for different operating systems and adapting to various hardware platforms.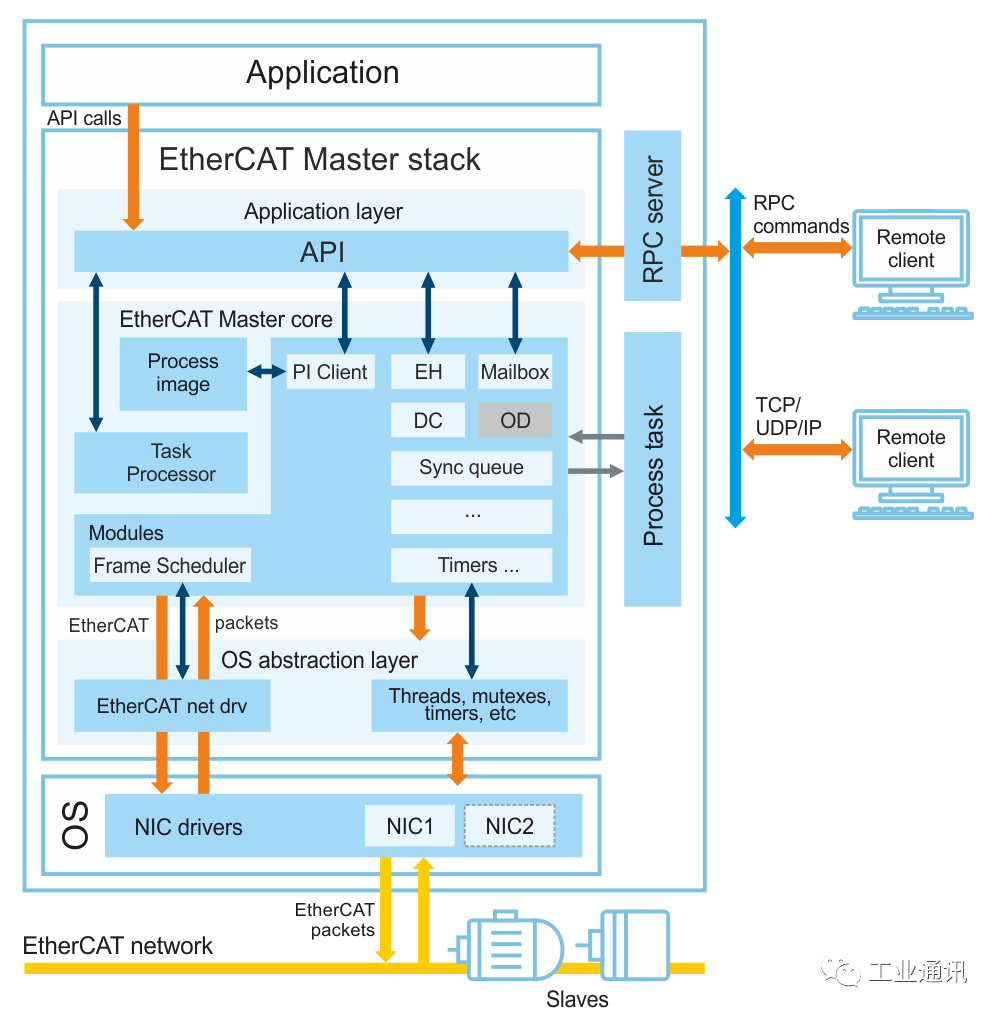
Architecture diagram of the Hongke KPA EtherCAT Master with bundled modules
Explanation
Application
This is a separate process that calls the main API functions. The application has almost complete control over the Master through the API: starting/stopping the Master, configuring, updating PI, etc.
API
Allows user applications to configure and manage the EtherCAT bus through the application programming interface (API)
RPC Server
The RPC server is responsible for establishing connections with remote clients (e.g., with KPA EtherCAT Studio) and forwarding requests to the EtherCAT master stack core. It supports user-to-user and user-to-kernel mode (via IOCtl calls).
Process Image
The process image consists of a shadow buffer (i.e., data transmitted directly to/from the network) and an active buffer (i.e., a buffer containing data received/sent from/to the KPA EtherCAT master client)
Processing Tasks (External Tasks)
Callback functions that implement specific application control algorithms. This callback function is called every time the PI update (high priority) loop is repeated.
Frame Scheduler
Assembles EtherCAT frames and forwards them to the EtherCAT network driver module based on their priority.
EtherCAT Network Driver
The RPC server is responsible for establishing connections with remote clients (e.g., with KPA EtherCAT Studio) and forwarding requests to the EtherCAT master stack core. It supports user-to-user and user-to-kernel mode (via IOCtl calls).
Threads, Mutexes, Timers, etc.
Wrapper for operating system-dependent functions for handling threads, timers, and mutexes.
NIC and its Driver
The Network Interface Card is a physical device used to send/receive frames to/from the EtherCAT network.
Remote Clients
Includes Hongke KPA EtherCAT Studio and other compatible programs
The main features of the Hongke KPA EtherCAT Master include centralized parameterization of intelligent slaves via UDP, special interface adaptation for operating systems, APIs for interaction with runtime and/or configuration tools, and servers for multiple TCP/IP and/or UDP connections.In response to various real-world application needs, Hongke offers four optional versions: Basic, Standard, Advanced, and Extended packages, which can meet different levels of user requirements.
Want to learn more about Hongke EtherCAT Master?
Feel free to scan the WeChat QR code below
We welcome you to follow and contact us
Recommended Reading
Hongke New Product | Hongke officially releases self-developed CANopen IO module, featuring an economical integrated design with excellent cost performance!
2022-01-20

Insights | Hongke KPA MoDK Operating Environment and Setup Steps (1) — Introduction to the Operating Environment
2022-01-11

Insights | Hongke KPA MoDK Operating Environment and Setup Steps (2) — Setting Up the MoDK Operating Environment
2022-01-13

Insights | Hongke KPA MoDK Operating Environment and Setup Steps (3) — MoDK Example Testing
2022-01-18

Hongke New Product | What is IO-Link? Want to easily and quickly introduce IO-Link technology? Check out Hongke’s IO-Link OEM module!
2022-01-06

Hongke KPA Automation softPLC, a PLC development environment designed for automation solutions
2022-01-04

Hongke High-Performance EtherCAT Solutions, helping you quickly deploy EtherCAT technology
2021-12-30
Hongke partners with Port to launch a new CC-Link IE TSN solution to enhance precision and productivity
2021-12-28

 Click to read the original text for more information!
Click to read the original text for more information!