1. Objective of This Article
This article will accomplish two tasks:
- Run the official dynamic target recognition example using the camera on the RK3588 development board.
- Interpret the source code to enhance understanding of the rknn development.
2. Development Environment Description
- Host System: Windows 11
- Target Device: Android development board equipped with RK3588 chip
- Core Tools: Android Studio Koala | 2024.1.1 Patch 2, NDK 27.0
3. Compilation and Execution
0. Source Code Location
The official path is rknn-toolkit2\rknpu2\examples\rknn_yolov5_android_apk_demo. If you cannot find it, feel free to contact me.
1. Directory Structure
As shown in the figure below: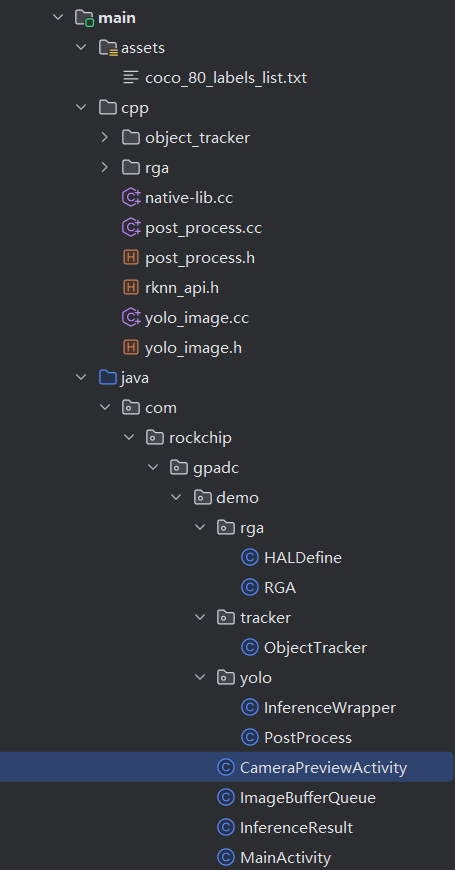
2. Compilation and Execution
After opening the project, dependencies are automatically downloaded. Click run, and it runs smoothly on the RK3588 development board without any obstacles. The following image shows the running effect, recognizing the three giants in the mobile phone image.

4. Code Interpretation
1. Core Issues
This case involves real-time target detection during camera preview, so there are several core issues to address:
- Camera Usage: The case uses the first-generation Camera API, which is no longer recommended, but it works well.
- Concurrent Operation: The camera previews while the program uses YOLOv5 for target detection. A dedicated inference thread is needed for detection.
- Image Format Conversion: The preview frames from the Camera API in Android are in NV21 format, while the Rockchip NPU requires RGB888 format.
- A container to cache preview frames is needed: A queue for image caching must be designed.
2. Main Process of the Program
It is recommended to start analyzing from CameraPreviewActivity, where the logic gradually unfolds.
Initialization Phase:
- onCreate():
- Initialize UI components (FPS display, result canvas).
- Load the preset YOLO model files into the cache directory based on the device platform (e.g., RK3588/RK356x).
- Initialize the inference engine mInferenceWrapper and the target detection result processor mInferenceResult.
- createPreviewView():
- Create a SurfaceView for camera preview and bind the SurfaceHolder callback.
Camera and Preview Control:
See the flowchart: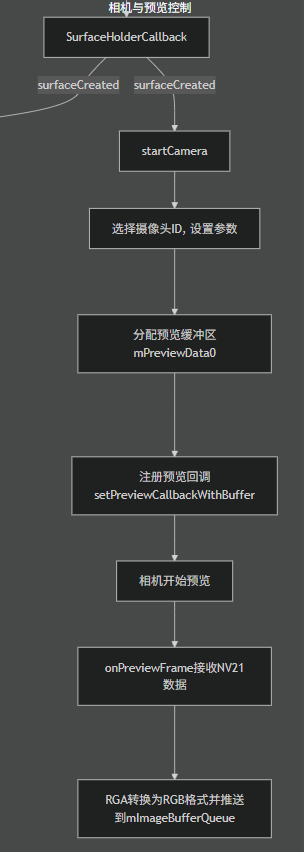
TSurfaceHolderCallback
- surfaceCreated(): Calls
<span>startCamera()</span>to open the camera and start preview. - surfaceDestroyed(): Stops the preview and releases camera resources.
startCamera()
- Select the camera ID based on the number of cameras (prefer ID=2).
- Configure camera parameters (resolution, preview format), set the preview buffer
<span>mPreviewData0</span>. - Register the preview data callback using
<span>setPreviewCallbackWithBuffer</span>.
onPreviewFrame()
- Receives preview frames in NV21 format.
- Uses RGA hardware acceleration to convert to RGB format.
- Pushed to the image queue
<span>mImageBufferQueue</span>.
@Override
public void onPreviewFrame(byte[] data, Camera camera) {
mCamera0.addCallbackBuffer(data);
ImageBufferQueue.ImageBuffer imageBuffer = mImageBufferQueue.getFreeBuffer();
if (imageBuffer != null) {
// RK_FORMAT_YCrCb_420_SP -> RK_FORMAT_RGBA_8888
// flip for CAMERA_FACING_FRONT
RGA.colorConvertAndFlip(data, RK_FORMAT_YCrCb_420_SP, imageBuffer.mImage_handle,
RK_FORMAT_RGB_888,
CAMERA_PREVIEW_WIDTH, CAMERA_PREVIEW_HEIGHT, this.flip);
mImageBufferQueue.postBuffer(imageBuffer);
}
}
Inference Thread
See the diagram below: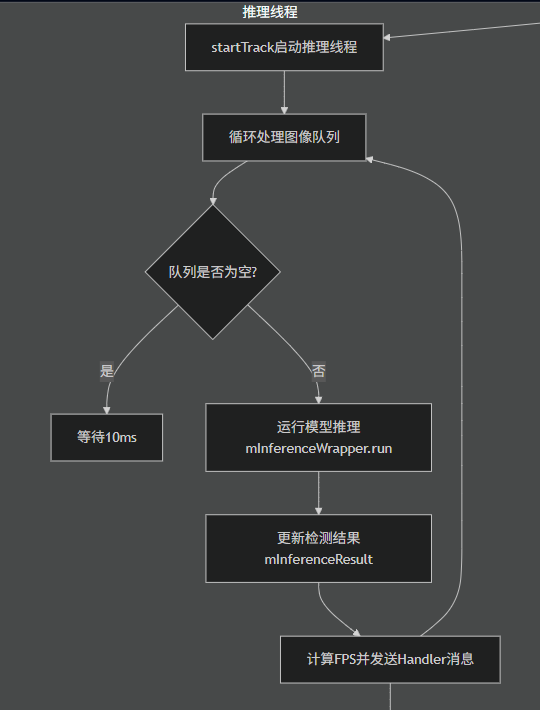
startTrack()
- Initializes the image queue and starts the inference thread
<span>mInferenceRunnable</span><span>.</span>
Inference Loop
- Gets RGB images from the queue.
- Calls
<span>mInferenceWrapper.run()</span>to run the YOLO model inference. - Calculates FPS and updates the UI via
<span>Handler</span>. - Detection results are stored in
<span>mInferenceResult</span>.
UI Rendering
See the diagram below: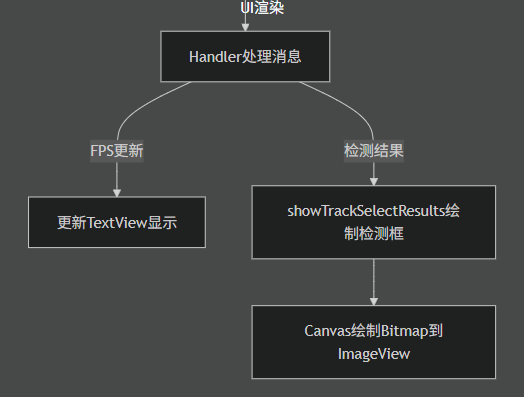
showTrackSelectResults()
- Draws detection boxes and category labels on
<span>Canvas</span>. - Displays results via
<span>ImageView</span>.
Handler Message Mechanism
- The main thread updates the FPS value and the bitmap of detection results.
3. Java Layer Related Classes
3.1 Core Wrapper Class for YOLO Target Detection Model: InferenceWrapper
This class is responsible for interacting with the underlying C++ implementation of the RKNN inference engine, completing the entire process of model initialization, inference execution, and post-processing.Member Variables:
OutputBuffer mOutputs; // Stores the raw output of the model
DetectResultGroup mDetectResults; // Container for native post-processing results
int OBJ_NUMB_MAX_SIZE = 64; // Maximum limit for the number of detected objects
The two classes (data structures) of DetectResultGroup are introduced later in the InferenceResult class.Model Initialization:
public int initModel(int im_height, int im_width, int im_channel, String modelPath) throws Exception {
mOutputs = new InferenceResult.OutputBuffer();
// Pre-allocate memory for YOLO's three-layer output:
mOutputs.mGrid0Out = new byte[255 * 80 * 80]; // 80x80 feature map
mOutputs.mGrid1Out = new byte[255 * 40 * 40]; // 40x40 feature map
mOutputs.mGrid2Out = new byte[255 * 20 * 20]; // 20x20 feature map
if (navite_init(im_height, im_width, im_channel, modelPath) != 0) {
throw new IOException("rknn init fail!");
}
return 0;
}
255 = 3(5+80) corresponds to the 3 anchors of YOLOv5, each anchor predicts 5 parameters + 80 categories.Inference Execution:
public OutputBuffer run(long img_buf_handle, int camera_width, int camera_height) {
native_run(img_buf_handle, camera_width, camera_height,
mOutputs.mGrid0Out, mOutputs.mGrid1Out, mOutputs.mGrid2Out);
return mOutputs;
}
// JNI interface
private native int native_run(long img_buf_handle, int cam_width, int cam_height, byte[] grid0Out, byte[] grid1Out, byte[] grid2Out);
The parameter img_buf_handle is the native handle of the image buffer. The results are directly written into the pre-allocated Java layer buffer via JNI.Post-Processing Flow:
public ArrayList<Recognition> postProcess(OutputBuffer outputs) {
// 1. Initialize result container
mDetectResults = new DetectResultGroup();
mDetectResults.ids = new int[OBJ_NUMB_MAX_SIZE];
mDetectResults.scores = new float[OBJ_NUMB_MAX_SIZE];
mDetectResults.boxes = new float[4 * OBJ_NUMB_MAX_SIZE];
// 2. Call native post-processing
int count = native_post_process(outputs.mGrid0Out, outputs.mGrid1Out, outputs.mGrid2Out,
mDetectResults.ids, mDetectResults.scores, mDetectResults.boxes);
// 3. Convert to Recognition objects
ArrayList<Recognition> recognitions = new ArrayList<>();
for (int i = 0; i < count; ++i) {
RectF rect = new RectF(
mDetectResults.boxes[i*4+0], // left
mDetectResults.boxes[i*4+1], // top
mDetectResults.boxes[i*4+2], // right
mDetectResults.boxes[i*4+3] // bottom
);
recognitions.add(new Recognition(
mDetectResults.ids[i],
mDetectResults.scores[i],
rect
));
}
return recognitions;
}
Native Methods:
| Method Signature | Function Description |
|---|---|
<span>navite_init()</span> |
Initializes the RKNN model, loading the specified model file from the path |
<span>native_deinit()</span> |
Releases model resources |
<span>native_run()</span> |
Executes inference, writing results to the Java layer buffer |
<span>native_post_process()</span> |
Executes NMS and other post-processing, returning detection results |
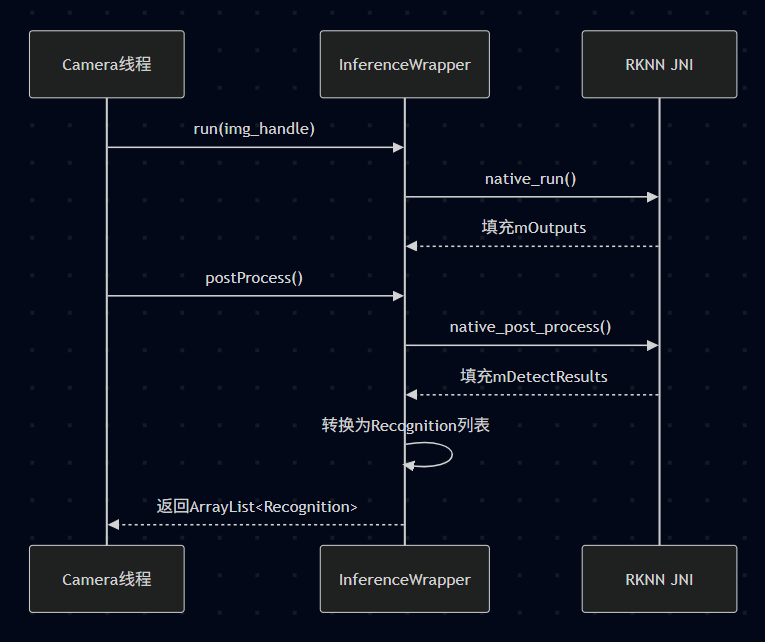
Relationship between InferenceWrapper and Camera Thread and RKNN JNI Timing Diagram:
Relationship with InferenceResult:
- Provides raw output (OutputBuffer) to InferenceResult for storage
- Executes postProcess() to generate final recognition resultsIn Cooperation with ObjectTracker:
- The generated list of Recognition will be passed to the tracker for ID association
3.2 InferenceResult Class
A utility class for processing target detection inference results, mainly responsible for storing inference outputs, processing detection results, and tracking detected objects.Main Member Variables:
OutputBuffer mOutputBuffer; // Stores the raw data of inference output
ArrayList<Recognition> recognitions = null; // Stores processed recognition results
private boolean mIsVaild = false; // Marks whether results need to be recalculated
PostProcess mPostProcess = new PostProcess(); // Post-processor
private ObjectTracker mSSDObjectTracker; // Object tracker
Important Internal Classes (Data Structures):
- OutputBuffer: Stores the three-layer output grids of the YOLO model
public static class OutputBuffer {
public byte[] mGrid0Out;
public byte[] mGrid1Out;
public byte[] mGrid2Out;
}
- Recognition: Represents a single detection result
public static class Recognition {
private int trackId = 0; // Tracking ID
private final int id; // Category ID
private final Float confidence; // Confidence
private RectF location; // Location rectangle
// Methods include getter/setter and toString()
}
- DetectResultGroup: Used to store native post-processing results
public static class DetectResultGroup {
public int count = 0; // Number of detections
public int[] ids; // Array of category IDs
public float[] scores; // Array of scores
public float[] boxes; // Array of bounding boxes
}
Main Member Methods:
- Reset Method: Clears results, resets flags, and resets ObjectTracker object
public void reset() {
if (recognitions != null) {
recognitions.clear();
mIsVaild = true;
}
mSSDObjectTracker = new ObjectTracker(CAMERA_PREVIEW_WIDTH, CAMERA_PREVIEW_HEIGHT, 3);
}
- Set Inference Result:
public synchronized void setResult(OutputBuffer outputs) {
// Clone or copy inference output data
if (mOutputBuffer.mGrid0Out == null) {
mOutputBuffer.mGrid0Out = outputs.mGrid0Out.clone();
mOutputBuffer.mGrid1Out = outputs.mGrid1Out.clone();
mOutputBuffer.mGrid2Out = outputs.mGrid2Out.clone();
} else {
arraycopy(outputs.mGrid0Out, 0, mOutputBuffer.mGrid0Out, 0, outputs.mGrid0Out.length);
arraycopy(outputs.mGrid1Out, 0, mOutputBuffer.mGrid1Out, 0, outputs.mGrid1Out.length);
arraycopy(outputs.mGrid2Out, 0, mOutputBuffer.mGrid2Out, 0, outputs.mGrid2Out.length);
}
mIsVaild = false; // Mark as needing reprocessing
}
3.3 ObjectTracker
The core class that implements target tracking functionality, based on JNI calls to the underlying tracking algorithm, assigns a unique ID to detected objects and maintains tracking across frames.Core Member Variables:
| Variable | Type | Description |
|---|---|---|
<span>mHandle</span> |
long | Native handle of the underlying tracker |
<span>mMaxTrackLifetime</span> |
int | Maximum number of frames to retain after target loss (default 3) |
<span>mWidth/mHeight</span> |
int | Image resolution |
<span>MAX_TRACKED_NUM</span> |
static int | Maximum number of tracked targets (64) |
<span>track_input_*</span> |
static array | Buffer for input data |
<span>track_output_*</span> |
static array | Buffer for output data |
Core Tracking Method:
public ArrayList<InferenceResult.Recognition> tracker(
ArrayList<InferenceResult.Recognition> recognitions) {
// 1. Prepare input data
for (int i = 0; i < recognitions.size(); ++i) {
RectF loc = recognitions.get(i).getLocation();
track_input_location[4*i] = loc.left;
track_input_location[4*i+1] = loc.top;
track_input_location[4*i+2] = loc.right;
track_input_location[4*i+3] = loc.bottom;
track_input_class[i] = recognitions.get(i).getId();
track_input_score[i] = recognitions.get(i).getConfidence();
}
// 2. Call Native Tracking
int[] track_output_num = new int[1];
native_track(mHandle, mMaxTrackLifetime,
recognitions.size(), track_input_location,
track_input_class, track_input_score,
track_output_num, track_output_location,
track_output_class, track_output_score,
track_output_id, mWidth, mHeight);
// 3. Convert output results
ArrayList<InferenceResult.Recognition> results = new ArrayList<>();
for (int i = 0; i < track_output_num[0]; ++i) {
RectF rect = new RectF(
track_output_location[i*4]/mWidth,
track_output_location[i*4+1]/mHeight,
track_output_location[i*4+2]/mWidth,
track_output_location[i*4+3]/mHeight);
InferenceResult.Recognition recog = new InferenceResult.Recognition(
track_output_class[i],
track_output_score[i] == -10000 ? 0 : track_output_score[i],
rect);
recog.setTrackId(track_output_id[i]); // Set tracking ID
results.add(recog);
}
return results;
}
Target tracking is a very important function in this case, and the specific algorithm is implemented at the native layer, which will be introduced later.native_track(): Executes cross-frame target tracking, parameter description: – handle: Tracker instance handle – maxTrackLifetime: Maximum number of lost frames – track_input_: Input data (location/class/score) – track_output_: Output data (location/class/score/ID) – width/height: Image resolution
3.4 ImageBufferQueue
Implementation of a circular buffer queue, mainly used to manage the production-consumption process of image buffers, optimized specifically for Rockchip NPU hardware acceleration.Buffer State Machine:
public class ImageBuffer {
static public final int STATUS_INVAILD = 0; // Invalid/Idle state
static public final int STATUS_READY = 1; // Data ready for processing
static public final int STATUS_USING = 2; // Currently in use
}
Member Variables
| Variable Name | Type | Description |
|---|---|---|
<span>mQueueBuffer</span> |
<span>ImageBuffer[]</span> |
Buffer array |
<span>mQueueBufferSize</span> |
<span>int</span> |
Total number of buffers |
<span>mCurrentFreeBufferIndex</span> |
<span>int</span> |
Current free buffer index |
<span>mCurrentUsingBufferIndex</span> |
<span>int</span> |
Current using buffer index |
Timing Diagram:

3.4.1 Buffer Acquisition and Release
Get Free Buffer (Producer):
public synchronized ImageBuffer getFreeBuffer() {
// Circularly find the first buffer that is not in the USING state
int index = mCurrentFreeBufferIndex;
for (int i=0; i<mQueueBufferSize; ++i) {
++index;
if (index >= mQueueBufferSize) {
index = 0;
}
if (mQueueBuffer[index].mStatus != ImageBuffer.STATUS_USING) {
break;
}
}
mCurrentFreeBufferIndex = index;
mQueueBuffer[index].mStatus = ImageBuffer.STATUS_INVAILD;
return mQueueBuffer[index];
}
Submit Ready Buffer:
public synchronized void postBuffer(ImageBuffer buffer) {
buffer.mStatus = ImageBuffer.STATUS_READY;
}
Get Ready Buffer (Consumer):
public synchronized ImageBuffer getReadyBuffer() {
// Circularly find a buffer in the READY state
int index = mCurrentUsingBufferIndex;
for (int i=0; i<mQueueBufferSize; ++i) {
++index;
if (index >= mQueueBufferSize) {
index = 0;
}
if (mQueueBuffer[index].mStatus == ImageBuffer.STATUS_READY) {
break;
}
}
if ((index != mCurrentUsingBufferIndex) && (mQueueBuffer[index].mStatus == ImageBuffer.STATUS_READY)) {
mCurrentUsingBufferIndex = index;
mQueueBuffer[index].mStatus = ImageBuffer.STATUS_USING;
return mQueueBuffer[index];
}
return null;
}
Release Used Buffer:
public synchronized void releaseBuffer(ImageBuffer buffer) {
buffer.mStatus = ImageBuffer.STATUS_INVAILD; // Reset to invalid state
}
3.4.2 NPU Memory Management
public class ImageBuffer {
public long mImage_handle; // NPU memory handle
public ImageBuffer(int width, int height) {
// Create NPU image buffer (RGB888 format)
mImage_handle = create_npu_img_buffer(RK_FORMAT_RGB_888);
}
protected void finalize() {
// Release NPU memory
release_npu_img_buffer(mImage_handle);
}
}
4. Native Layer
From the flow in the Java layer, you will gradually call the implementation in the native layer. All JNI interfaces are in the native-lib.cc source file. Below are some key points:
4.1 Image Format Conversion
In the Java layer onPreviewFrame, the native layer’s color_convert_and_flip interface is called, as seen in RGA.java
public static int colorConvertAndFlip(byte[] src, int srcFmt, long npu_buf_handle, int dstFmt,
int width, int height, int flip) {
if (src == null) {
Log.w("rkyolo.RGA", "src or dst is null");
return -1;
}
return color_convert_and_flip(src, srcFmt, npu_buf_handle, dstFmt, width, height, flip);
}
private static native int color_convert_and_flip(byte[] src, int srcFmt, long npu_buf_handle, int dstFmt,
int width, int height, int flip);
JNI Bridge Implementation: See native-lib.cc
extern "C"
JNIEXPORT jint JNICALL
Java_com_rockchip_gpadc_demo_rga_RGA_color_1convert_1and_1flip(
JNIEnv* env, jclass clazz,
jbyteArray src, jint src_fmt,
jlong npu_buf_handle,
jint dst_fmt,
jint width, jint height, jint flip)
{
// Get the Native pointer of the Java array
jbyte* src_buf = env->GetByteArrayElements(src, nullptr);
// Call the core processing function
jint ret = colorConvertAndFlip(src_buf, src_fmt, npu_buf_handle,
dst_fmt, width, height, flip);
// Release Java array resources
env->ReleaseByteArrayElements(src, src_buf, 0);
return ret;
}
Core Logic Implementation: See yolo-image.cc
// Convert NPU buffer handle
auto p_dst_buf = reinterpret_cast<img_npu_buffer*>(npu_buf_handle);
// Create RGA source buffer
rga_buffer_handle_t rga_src_handle =
importbuffer_virtualaddr(src, width*height*4);
rga_buffer_t rga_src =
wrapbuffer_handle(rga_src_handle, width, height, srcFmt);
// Image processing
if (DO_NOT_FLIP == flip) {
// Only color space conversion
ret = imcvtcolor(rga_src, p_dst_buf->rga_buf,
rga_src.format, p_dst_buf->rga_buf.format);
} else {
// Color conversion + flip processing
ret = imflip(rga_src, p_dst_buf->rga_buf, flip);
}
// Resource release
if (rga_src_handle) {
releasebuffer_handle(rga_src_handle);
}
The core methods imcvtcolor and imflip are implemented in the RGB library…
4.2 Target Tracking
The target tracking code is located in cpp/object_tracker, with JNI bridging in native-lib.cc
4.2.1 Starting with JNI Bridging Methods
Bridge Method Signature:
JNIEXPORT void JNICALL Java_com_rockchip_gpadc_demo_tracker_ObjectTracker_native_1track
(JNIEnv * env, jobject obj,
jlong handle,
jint maxTrackLifetime,
jint track_input_num,
jfloatArray track_input_locations,
jintArray track_input_class,
jfloatArray track_input_score,
jintArray track_output_num,
jfloatArray track_output_locations,
jintArray track_output_class,
jfloatArray track_output_score,
jintArray track_output_id,
jint width,
jint height)
Parameter Description:
| Parameter Type | Parameter Name | Description |
|---|---|---|
| jlong | handle | Native tracker instance handle |
| jint | maxTrackLifetime | Maximum number of frames to retain after target loss |
| jint | track_input_num | Number of input targets |
| jfloatArray | track_input_locations | Input target location array (4*num) |
| jintArray | track_input_class | Input target category array |
| jfloatArray | track_input_score | Input target confidence array |
| jintArray | track_output_num | Output target count |
| jfloatArray | track_output_locations | Output target location array (4*num) |
| jintArray | track_output_class | Output target category array |
| jfloatArray | track_output_score | Output target confidence array |
| jintArray | track_output_id | Output target tracking ID array |
| jint | width | Image width |
| jint | height | Image height |
4.2.2 Core Data Structures
- Basic Structure:
typedef struct {
int x, y; // Top-left coordinates
int width, height; // Width and height
} Rect_T;
typedef struct {
Rect_T r; // Bounding box
int obj_class; // Category ID
float score; // Confidence
int id; // Tracking ID
int reserve[1]; // Reserved field
} object_T;
- Extended Structure for Tracking Objects:
struct ExtObject {
int id; // Tracking ID
Rect_T location; // Current location
Rect_T predict_loc_when_miss; // Predicted location when lost
Rect_T smooth_rect; // Smoothed position
ObjectStatus status; // Status
int detectedNum; // Number of detections
int noDetectedNum; // Number of non-detections
int obj_class; // Category
float score; // Confidence
int miss; // Loss flag
};
track Method
The bridge method directly calls the track method in track_link.cpp: responsible for associating detection results with existing tracking targets and outputting tracking results with stable IDs.Parameter Description:
| Parameter Type | Parameter Name | Description |
|---|---|---|
<span>long</span> |
handle | Native handle of the tracker instance |
<span>int</span> |
maxTrackLifetime | Maximum number of frames to retain after target loss |
<span>int</span> |
track_input_num | Number of input targets |
<span>float*</span> |
c_track_input_locations | Input target location array (each target has 4 floats: x1,y1,x2,y2) |
<span>int*</span> |
c_track_input_class | Input target category array |
<span>float*</span> |
c_track_input_score | Input target confidence array |
<span>int*</span> |
c_track_output_num | Output target count |
<span>float*</span> |
c_track_output_locations | Output target location array |
<span>int*</span> |
c_track_output_class | Output target category array |
<span>float*</span> |
c_track_output_score | Output target confidence array |
<span>int*</span> |
c_track_output_id | Output target tracking ID array |
<span>int</span> |
width | Image width |
<span>int</span> |
height | Image height |
Input Data Conversion: Converts the bounding box format passed from the Java layer to the internal processing format
for (int i = 0; i < track_input_num; i++) {
// Convert [x1,y1,x2,y2] to [x,y,width,height] format
object_input[i].r.x = (int)c_track_input_locations[i*4 +0];
object_input[i].r.y = (int)c_track_input_locations[i*4 +1];
object_input[i].r.width = (int)(c_track_input_locations[i*4 +2] - c_track_input_locations[i*4 +0]);
object_input[i].r.height = (int)(c_track_input_locations[i*4 +3] - c_track_input_locations[i*4 +1]);
// Copy category and confidence
object_input[i].score = c_track_input_score[i];
object_input[i].obj_class = c_track_input_class[i];
}
Execute Tracking Update: Calls the tracking algorithm to update the target state
object->update(maxTrackLifetime, track_input_num, object_input,
c_track_output_num, object_output, width, height);
Output Data Conversion: Converts the internal format to the output format expected by the Java layer
for (int i = 0; i < *c_track_output_num; i++) {
// Convert [x,y,width,height] back to [x1,y1,x2,y2] format
c_track_output_locations[i*4 +0] = (float)object_output[i].r.x;
c_track_output_locations[i*4 +1] = (float)object_output[i].r.y;
c_track_output_locations[i*4 +2] = (float)(object_output[i].r.x + object_output[i].r.width);
c_track_output_locations[i*4 +3] = (float)(object_output[i].r.y + object_output[i].r.height);
// Copy category, confidence, and tracking ID
c_track_output_class[i] = object_output[i].obj_class;
c_track_output_score[i] = object_output[i].score;
c_track_output_id[i] = object_output[i].id;
}
4.2.4 OdtDetector::update Method
This method is responsible for processing newly detected targets and associating them with existing tracking targets, outputting tracking results with stable IDs.Parameter Description:
| Parameter | Type | Description |
|---|---|---|
<span>maxTrackLifetime</span> |
int | Maximum number of frames to retain after target loss |
<span>track_num_input</span> |
int | Number of input targets |
<span>object_input</span> |
object_T* | Input target array (includes location, category, score) |
<span>track_num_output</span> |
int* | Output target count (returned via pointer) |
<span>object_output</span> |
object_T* | Output target array |
<span>width</span> |
int | Image width |
<span>height</span> |
int | Image height |
Main Process
- Data Preparation Phase: Converts input data to vector format for subsequent processing
std::vector<Rect_T> objects_Rect_T;
std::vector<int> objects_class;
std::vector<float> object_score;
for (int i = 0; i < track_num_input; i++) {
objects_Rect_T.push_back(object_input[i].r);
objects_class.push_back(object_input[i].obj_class);
object_score.push_back(object_input[i].score);
}
- Core Tracking Update: Calls the underlying tracker to associate targets and update their states
m_objects_tracker.updateTrackedObjects(objects_Rect_T, objects_class,
object_score, maxTrackLifetime,
m_width, m_height);
- Get Tracking Results: Retrieves extended target information from the tracker
std::vector<ObjectsTracker::ExtObject> extObjects;
m_objects_tracker.getObjects(extObjects);
- Result Output Processing: Selects output location information based on target status and fills complete output data
int nobjects = (int)extObjects.size();
track_num_output[0] = nobjects;
for (; i < nobjects && i < 100; i++) {
if(extObjects[i].miss == 0) {
object_output[i].r = extObjects[i].smooth_rect; // Use smoothed position
} else {
object_output[i].r = extObjects[i].predict_loc_when_miss; // Use predicted position
}
object_output[i].obj_class = extObjects[i].obj_class;
object_output[i].score = extObjects[i].score;
object_output[i].id = extObjects[i].id;
}
4.2.5 ObjectsTracker::updateTrackedObjects Method
The core algorithm implementation of the multi-target tracking system, using an IOU (Intersection over Union)-based matching strategy, combined with motion prediction and state management, to achieve stable association between detection boxes and tracking targets.TrackedObject Tracking Target Structure:
struct TrackedObject {
std::vector<Rect_T> lastPositions; // Historical position records
Rect_T predict_loc_when_miss; // Predicted location when lost
Rect_T smooth_Positionn; // Smoothed position
float vx, vy; // Motion speed
int numDetectedFrames; // Total number of detection frames
int numFramesDetected; // Continuous detection frames
int numFramesNotDetected; // Continuous loss frames
int id; // Unique ID
int obj_class; // Target category
float score; // Confidence
int miss; // Loss flag
};
Main Process:
- Initialization
int N1 = trackedObjects.size(); // Number of existing tracking targets
int N2 = detectedObjects.size(); // Number of new detected targets
// Initialize matching relationship table
std::vector<int> correspondence(N2, NEW_RECTANGLE);
std::vector<float> correspondenceScore(N2, 0);
- Motion Prediction: Calculates motion speed based on historical positions to predict current location
for(int i=0; i < N1; i++) {
if(numpositions>1) {
predict_loctation(curObject, image_width, image_height, pre_x, pre_y, vx, vy);
curObject.vx = vx;
curObject.vy = vy;
// Update predicted location
prevRect.x = (int)pre_x;
prevRect.y = (int)pre_y;
curObject.predict_loc_when_miss = prevRect;
}
}
- Data AssociationPrimary Matching: Calculates matching scores based on IOU and number of lost frames
for(int j=0; j < N2; j++) {
float iou = CalculateIOU(prevRect, detectedObjects[j]);
if (iou > 0.1f) {
float trackScore = iou / (curObject.numFramesNotDetected + 1);
if (iou > bestArea && correspondenceScore[j] < trackScore) {
bestIndex = j;
bestArea = iou;
correspondenceScore[j] = trackScore;
}
}
}
Conflict Resolution: Handles conflicts of overlapping detection boxes
for(int j=0; j < N2; j++) {
if(correspondence[j] >= 0) continue;
float iou = CalculateIOU(detectedObjects[j], detectedObjects[bestIndex]);
if(iou > 0.45f) {
correspondence[j] = INTERSECTED_RECTANGLE; // Mark as conflict box
}
}
- State UpdateUpdate Existing Targets: Uses weighted average for position smoothing, combined with motion prediction
trackedObjects[i].lastPositions.push_back(detectedObjects[j]);
// Maintain the length of the historical position queue
while(trackedObjects[i].lastPositions.size() > parameters.numLastPositionsToTrack) {
trackedObjects[i].lastPositions.erase(trackedObjects[i].lastPositions.begin());
}
// Smoothing processing
trackedObjects[i].smooth_Positionn.x =
((smooth.x + smooth.width*0.5f)*0.5f + (detect.x + detect.width*0.5f)*1.f)/1.5f
+ vx*0.5f/1.5f - smooth.width*0.5f;
Create New Targets: Creates new tracking targets for unmatched detection boxes
trackedObjects.push_back(detectedObjects[j]);
trackedObjects.back().obj_class = objects_class[j];
trackedObjects.back().score = objects_score[j];
Conclusion
This article indeed took many days to write (and was quite exhausting). Some C++ code still needs further contemplation. Target tracking, RGB conversion, and image buffer queues are all very meaningful. They can still be referenced in other projects. Writing is not easy, please provide guidance and support.