The full English name of SPI is Serial Peripheral Interface, which, as the name suggests, is a serial peripheral interface.SPI is a synchronous serial communication interface specification primarily used for short-distance communication in embedded systems.This interface was developed by Motorola in the mid-1980s and has since evolved into an industry standard.SPI is a high-speed, full-duplex, synchronous communication bus that requires at most only 4 wires, saving chip pins. SPI is mainly used between EEPROM, FLASH, ADC, DAC chips, as well as between digital signal processors and digital signal decoders.SPI devices communicate in full-duplex mode, operating in a master-slave configuration with one master and one or more slaves. The master is responsible for initializing the frame, which can be used for both read and write operations, and the chip select line can select one of multiple slaves to respond to the master’s request.Data from the master or slave is synchronized on the rising or falling edge of the clock. The master and slave can transmit data simultaneously. The SPI interface can be either 3-wire or 4-wire.This article focuses on the commonly used 4-wire SPI interface.
Interface
4-wire SPI devices have four signals:
-
Clock (SPICLK, SCLK)
-
Chip Select (CS) Master Output
-
Master Output Slave Input (MOSI)
-
Master Input Slave Output (MISO)
The device that generates the clock signal is called the master. The data transmitted between the master and slave is synchronized with the clock generated by the master. Compared to the I2C interface, SPI devices support higher clock frequencies. Users should refer to the product datasheet for the clock frequency specifications of the SPI interface.
There can only be one master in an SPI interface, but there can be one or more slaves. Figure 1 shows the SPI connection between the master and slave.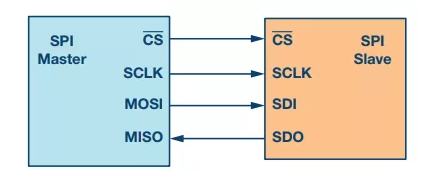 Figure 1. SPI Configuration with Master and Slave
Figure 1. SPI Configuration with Master and Slave
The chip select signal from the master is used to select the slave. This is usually a low-active signal, which disconnects the slave from the SPI bus when pulled high. When using multiple slaves, the master needs to provide a separate chip select signal for each slave. The chip select signal in this article is always a low-active signal.
MOSI and MISO are the data lines. MOSI sends data from the master to the slave, while MISO sends data from the slave to the master.
Data Transmission
To start SPI communication, the master must send a clock signal and select the slave by enabling the CS signal. The chip select is usually a low-active signal. Therefore, the master must send a logic 0 on this signal to select the slave.SPI is a full-duplex interface, allowing the master and slave to send data simultaneously through the MOSI and MISO lines. During SPI communication, data transmission (serially shifting out to the MOSI/SDO line) and reception (sampling or reading data on the MISO/SDI line) occur simultaneously. The serial clock edge synchronizes the shifting and sampling of data.The SPI interface allows users to flexibly choose the rising or falling edge of the clock to sample and/or shift data. To determine the number of bits transmitted using the SPI interface, refer to the device datasheet.
Clock Polarity and Clock Phase
In SPI, the master can choose the clock polarity and clock phase.During idle state, CPOL sets the polarity of the clock signal. The idle state refers to when CS is high at the start of transmission and during the transition to low, and when CS is low at the end of transmission and during the transition to high.CPHA selects the clock phase.
Depending on the state of the CPHA bit, the clock rising or falling edge is used to sample and/or shift data. The master must select the clock polarity and clock phase according to the requirements of the slave. Based on the selection of CPOL and CPHA bits, four SPI modes are available. Table 1 shows these 4 SPI modes.
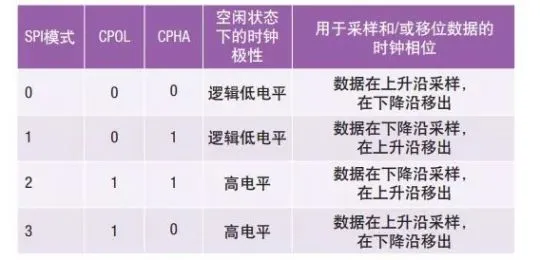 Table 1. Selecting SPI Modes via CPOL and CPHA
Table 1. Selecting SPI Modes via CPOL and CPHA
Figures 2 to 5 show communication examples under the four SPI modes. In these examples, the data is displayed on the MOSI and MISO lines.The start and end of the transmission are indicated by green dashed lines,the sampling edges are indicated by orange dashed lines, and the shifting edges are indicated by blue dashed lines. Please note that these diagrams are for reference only. To successfully perform SPI communication, users must refer to the product datasheet and ensure compliance with the device’s timing specifications.
Figure 2 shows the timing diagram for SPI mode 0. In this mode, the clock polarity is 0, indicating that the idle state of the clock signal is low. The clock phase in this mode is 0, indicating that data is sampled on the rising edge (shown by the orange dashed line), and data is shifted out on the falling edge of the clock signal (shown by the blue dashed line).
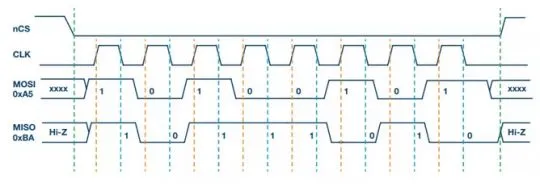 Figure 2. SPI Mode 0, CPOL = 0, CPHA = 0: CLK Idle State = Low, Data Sampled on Rising Edge, Shifted Out on Falling EdgeFigure 3 shows the timing diagram for SPI mode 1. In this mode, the clock polarity is 0, indicating that the idle state of the clock signal is low. The clock phase in this mode is 1, indicating that data is sampled on the falling edge (shown by the orange dashed line), and data is shifted out on the rising edge of the clock signal (shown by the blue dashed line).
Figure 2. SPI Mode 0, CPOL = 0, CPHA = 0: CLK Idle State = Low, Data Sampled on Rising Edge, Shifted Out on Falling EdgeFigure 3 shows the timing diagram for SPI mode 1. In this mode, the clock polarity is 0, indicating that the idle state of the clock signal is low. The clock phase in this mode is 1, indicating that data is sampled on the falling edge (shown by the orange dashed line), and data is shifted out on the rising edge of the clock signal (shown by the blue dashed line).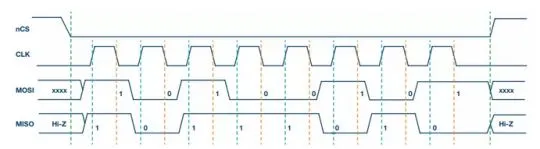 Figure 3. SPI Mode 1, CPOL = 0, CPHA = 1: CLK Idle State = Low, Data Sampled on Falling Edge, Shifted Out on Rising Edge
Figure 3. SPI Mode 1, CPOL = 0, CPHA = 1: CLK Idle State = Low, Data Sampled on Falling Edge, Shifted Out on Rising Edge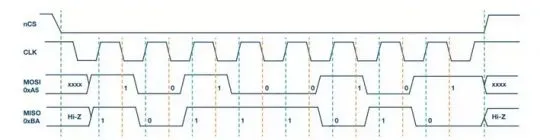 Figure 4. SPI Mode 2, CPOL = 1, CPHA = 1: CLK Idle State = High, Data Sampled on Falling Edge, Shifted Out on Rising EdgeFigure 4 shows the timing diagram for SPI mode 2. In this mode, the clock polarity is 1, indicating that the idle state of the clock signal is high. The clock phase in this mode is 1, indicating that data is sampled on the falling edge (shown by the orange dashed line), and data is shifted out on the rising edge of the clock signal (shown by the blue dashed line).
Figure 4. SPI Mode 2, CPOL = 1, CPHA = 1: CLK Idle State = High, Data Sampled on Falling Edge, Shifted Out on Rising EdgeFigure 4 shows the timing diagram for SPI mode 2. In this mode, the clock polarity is 1, indicating that the idle state of the clock signal is high. The clock phase in this mode is 1, indicating that data is sampled on the falling edge (shown by the orange dashed line), and data is shifted out on the rising edge of the clock signal (shown by the blue dashed line).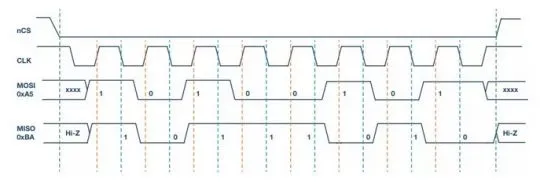 Figure 5. SPI Mode 3, CPOL = 1, CPHA = 0: CLK Idle State = High, Data Sampled on Rising Edge, Shifted Out on Falling EdgeFigure 5 shows the timing diagram for SPI mode 3. In this mode, the clock polarity is 1, indicating that the idle state of the clock signal is high. The clock phase in this mode is 0, indicating that data is sampled on the rising edge (shown by the orange dashed line), and data is shifted out on the falling edge of the clock signal (shown by the blue dashed line).
Figure 5. SPI Mode 3, CPOL = 1, CPHA = 0: CLK Idle State = High, Data Sampled on Rising Edge, Shifted Out on Falling EdgeFigure 5 shows the timing diagram for SPI mode 3. In this mode, the clock polarity is 1, indicating that the idle state of the clock signal is high. The clock phase in this mode is 0, indicating that data is sampled on the rising edge (shown by the orange dashed line), and data is shifted out on the falling edge of the clock signal (shown by the blue dashed line).
Multi-Slave Configuration
Multiple slaves can be used with a single SPI master. Slaves can be connected in a conventional mode or in a daisy chain mode.Conventional SPI ModeIn conventional mode, the master needs to provide a separate chip select signal for each slave. Once the master enables (pulls low) the chip select signal, the clock and data on the MOSI/MISO lines become available for the selected slave. If multiple chip select signals are enabled, the data on the MISO line will be corrupted because the master cannot identify which slave is transmitting data.As shown in Figure 6, as the number of slaves increases, the number of chip select lines from the master also increases. This quickly increases the number of inputs and outputs that the master needs to provide, limiting the number of slaves that can be used. Other techniques, such as using multiplexers to generate chip select signals, can be used to increase the number of slaves in conventional mode.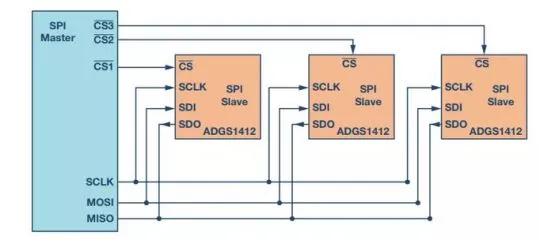 Figure 6. Multi-Slave SPI ConfigurationDaisy Chain ModeIn daisy chain mode, the chip select signals of all slaves are connected together, and data propagates from one slave to the next. In this configuration, all slaves receive the same SPI clock simultaneously. Data from the master is sent directly to the first slave, which then provides the data to the next slave, and so on.When using this method, the number of clock cycles required to transmit data is proportional to the position of the slave in the daisy chain. For example, in the 8-bit system shown in Figure 7, to enable the third slave to receive data, 24 clock pulses are needed, while only 8 clock pulses are required in conventional SPI mode.
Figure 6. Multi-Slave SPI ConfigurationDaisy Chain ModeIn daisy chain mode, the chip select signals of all slaves are connected together, and data propagates from one slave to the next. In this configuration, all slaves receive the same SPI clock simultaneously. Data from the master is sent directly to the first slave, which then provides the data to the next slave, and so on.When using this method, the number of clock cycles required to transmit data is proportional to the position of the slave in the daisy chain. For example, in the 8-bit system shown in Figure 7, to enable the third slave to receive data, 24 clock pulses are needed, while only 8 clock pulses are required in conventional SPI mode.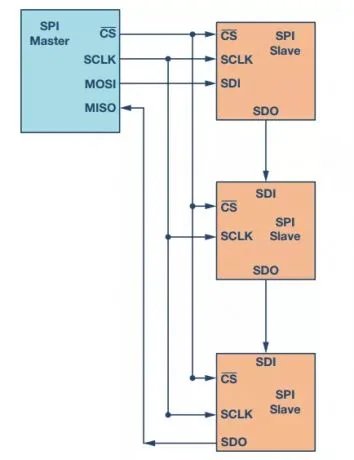 Figure 7. Multi-Slave SPI Daisy Chain ConfigurationFigure 8 shows the clock cycles and data propagation through the daisy chain. Not all SPI devices support daisy chain mode. Please refer to the product datasheet to confirm if daisy chaining is available.
Figure 7. Multi-Slave SPI Daisy Chain ConfigurationFigure 8 shows the clock cycles and data propagation through the daisy chain. Not all SPI devices support daisy chain mode. Please refer to the product datasheet to confirm if daisy chaining is available.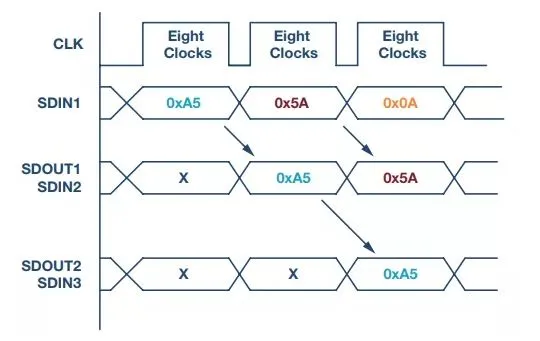 Figure 8. Daisy Chain Configuration: Data PropagationADI’s latest generation of SPI-supported switches can significantly save space without compromising precision switch performance. This section of the article will discuss a case study illustrating how SPI-supported switches or multiplexers can greatly simplify system-level design and reduce the number of GPIOs required.ADG1412 is a four-channel, single-pole single-throw (SPST) switch that requires four GPIOs connected to the control inputs of each switch. Figure 9 shows the connection between a microcontroller and an ADG1412.
Figure 8. Daisy Chain Configuration: Data PropagationADI’s latest generation of SPI-supported switches can significantly save space without compromising precision switch performance. This section of the article will discuss a case study illustrating how SPI-supported switches or multiplexers can greatly simplify system-level design and reduce the number of GPIOs required.ADG1412 is a four-channel, single-pole single-throw (SPST) switch that requires four GPIOs connected to the control inputs of each switch. Figure 9 shows the connection between a microcontroller and an ADG1412.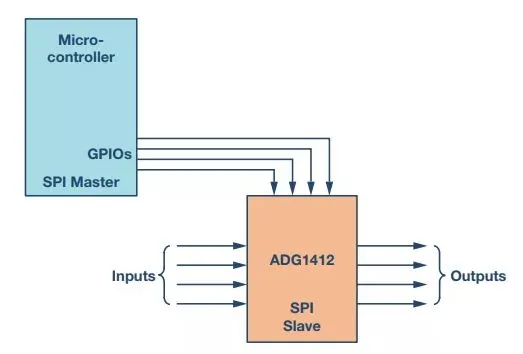 Figure 9. Microcontroller GPIO Used as Control Signals for SwitchesAs the number of switches on the circuit board increases, the number of required GPIOs also increases significantly. For example, when designing a test instrument system, a large number of switches are used to increase the number of channels in the system. In a 4×4 crosspoint matrix configuration, four ADG1412s are used. This system requires 16 GPIOs, limiting the available GPIOs in a standard microcontroller. Figure 10 shows the connection of four ADG1412s using 16 GPIOs from a microcontroller.
Figure 9. Microcontroller GPIO Used as Control Signals for SwitchesAs the number of switches on the circuit board increases, the number of required GPIOs also increases significantly. For example, when designing a test instrument system, a large number of switches are used to increase the number of channels in the system. In a 4×4 crosspoint matrix configuration, four ADG1412s are used. This system requires 16 GPIOs, limiting the available GPIOs in a standard microcontroller. Figure 10 shows the connection of four ADG1412s using 16 GPIOs from a microcontroller.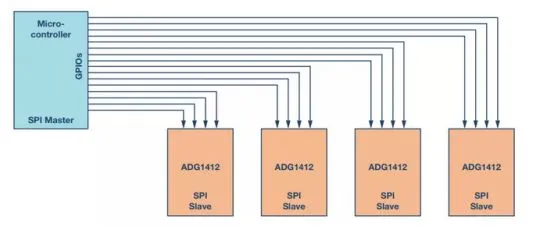 Figure 10. Significant Increase in Required GPIOs in Multi-Slave Configuration
Figure 10. Significant Increase in Required GPIOs in Multi-Slave Configuration
How to Reduce the Number of GPIOs?
One method is to use a serial-to-parallel converter, as shown in Figure 11. The parallel signals output by this device can be connected to the control inputs of the switches, and the device can be configured via the SPI interface. The downside of this method is that the additional device increases the bill of materials.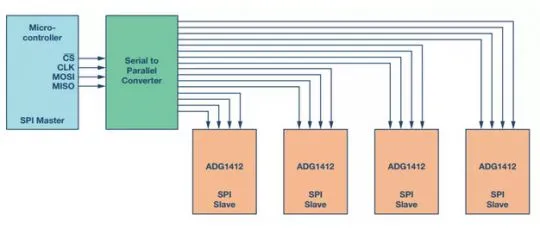 Figure 11. Multi-Slave Switch Using Serial-to-Parallel ConverterAnother method is to use SPI-controlled switches. The advantage of this method is that it reduces the number of required GPIOs and eliminates the overhead of an external serial-to-parallel converter. As shown in Figure 12, instead of needing 16 microcontroller GPIOs, only 7 microcontroller GPIOs are needed to provide SPI signals to four ADGS1412s. The switches can be configured in a daisy chain to further optimize the number of GPIOs. In a daisy chain configuration, regardless of how many switches the system uses, only four GPIOs from the master (microcontroller) are used.
Figure 11. Multi-Slave Switch Using Serial-to-Parallel ConverterAnother method is to use SPI-controlled switches. The advantage of this method is that it reduces the number of required GPIOs and eliminates the overhead of an external serial-to-parallel converter. As shown in Figure 12, instead of needing 16 microcontroller GPIOs, only 7 microcontroller GPIOs are needed to provide SPI signals to four ADGS1412s. The switches can be configured in a daisy chain to further optimize the number of GPIOs. In a daisy chain configuration, regardless of how many switches the system uses, only four GPIOs from the master (microcontroller) are used.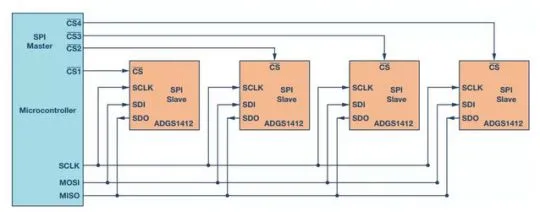 Figure 12. SPI-Supported Switches Save Microcontroller GPIOsFigure 13 is for illustration purposes. The ADGS1412 datasheet recommends using a pull-up resistor on the SDO pin. For simplicity, this example uses four switches. As the number of switches in the system increases, the advantages of a simpler and space-saving circuit board become important.
Figure 12. SPI-Supported Switches Save Microcontroller GPIOsFigure 13 is for illustration purposes. The ADGS1412 datasheet recommends using a pull-up resistor on the SDO pin. For simplicity, this example uses four switches. As the number of switches in the system increases, the advantages of a simpler and space-saving circuit board become important.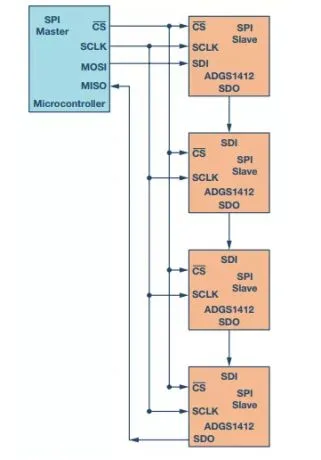 Figure 13. SPI Switches in Daisy Chain Configuration Further Optimize GPIOs
Figure 13. SPI Switches in Daisy Chain Configuration Further Optimize GPIOs
Placing eight four-channel SPST switches on a 6-layer circuit board in a 4×8 crosspoint configuration, ADI’s SPI-supported switches can save 20% of the total circuit board space.
Advantages and Disadvantages of the SPI Protocol
The advantages of SPI include higher throughput than I2C, not being limited by maximum clock speed, potential for high speed, extremely simple hardware interface, fewer pull-up resistors used in peripheral circuits compared to the I2C protocol, which means lower power consumption than I2C, the clock source for slaves comes from the master device without the need for additional precision oscillators, slaves do not require unique addresses, and significantly fewer pins used compared to parallel interfaces.
However, there are certain disadvantages, such as SPI lacking in-band addressing, when using multiple slaves with different modes, the master device must reinitialize when switching modes, which slows down access to slave devices, SPI slave devices lack hardware flow control and can only delay the arrival time of the next clock cycle by the master, and it is limited to short-distance communication. However, if SPI can be applied in a way that avoids its disadvantages, its advantages far outweigh those of other protocols.
Source: Internet, copyright belongs to the original author. If there is any infringement, please contact for deletion.