The PARK transformation (also known as PARK transformation) is a core mathematical tool in power systems and motor control, essentially a coordinate transformation— it converts time-varying physical quantities (such as voltage, current, and magnetic flux) in a three-phase AC system into a “rotating coordinate system” that synchronously rotates with the rotor, thereby transforming time-varying signals into “DC quantities” and significantly simplifying the complexity of motor control and system analysis.
1. Why is PARK Transformation Needed? — Core Pain Points and Solutions
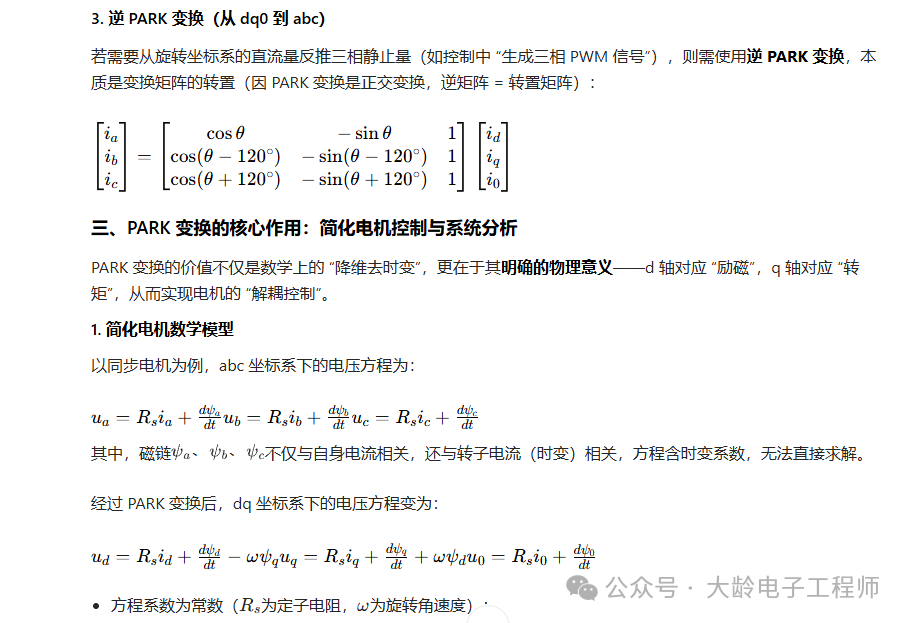
When analyzing three-phase AC motors (such as asynchronous motors and synchronous motors), directly using the three-phase stationary coordinate system (abc coordinate system) faces a critical issue: the magnetic coupling relationship between the stator winding and rotor winding of the motor is time-varying (due to rotor rotation, the air gap magnetic resistance changes periodically), resulting in the motor’s mathematical model (voltage equations, magnetic flux equations) being filled with sinusoidal time-varying coefficients, making the equations highly nonlinear and impossible to design controllers directly using simple linear control theories (such as PID).
The core idea of PARK transformation is to “remove time variation”: by establishing a coordinate system that synchronously rotates with the motor rotor (commonly referred to as the dq0 coordinate system), the three-phase time-varying physical quantities in the abc coordinate system are decomposed into:
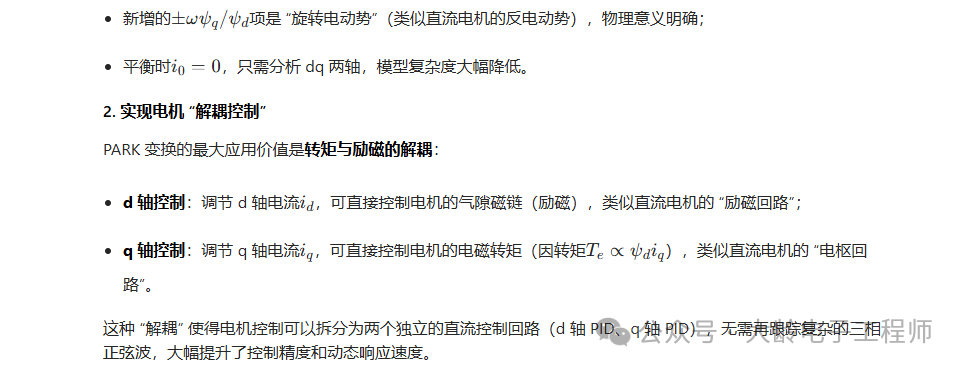
- d-axis component: the DC component along the direction of the rotor’s main magnetic flux (excitation direction);
- q-axis component: the DC component perpendicular to the d-axis (torque direction);
After transformation, the time-varying coefficients in the motor model disappear, and the voltage and magnetic flux equations become constant coefficient linear equations, simplifying the control objective from “tracking three-phase sinusoidal waves” to “controlling two DC quantities (d-axis, q-axis)”, greatly reducing the difficulty of control.
2. The Mathematical Essence of PARK Transformation: From “Stationary” to “Rotating” Coordinate Mapping
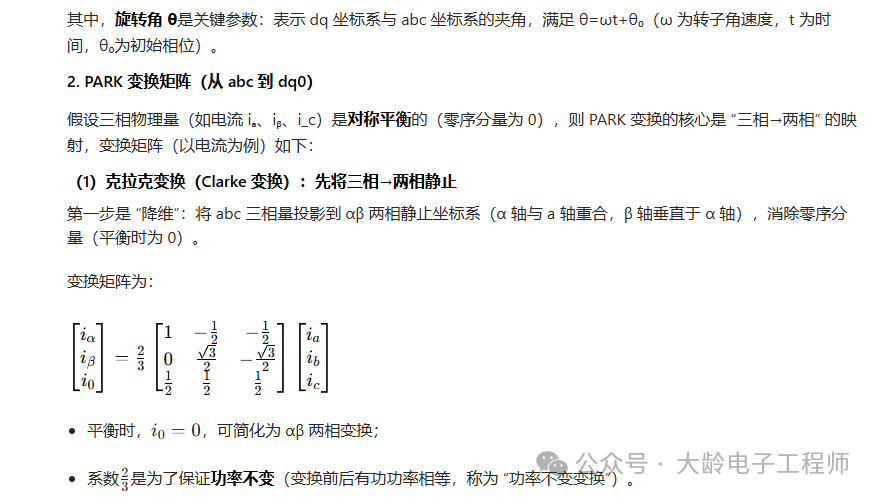
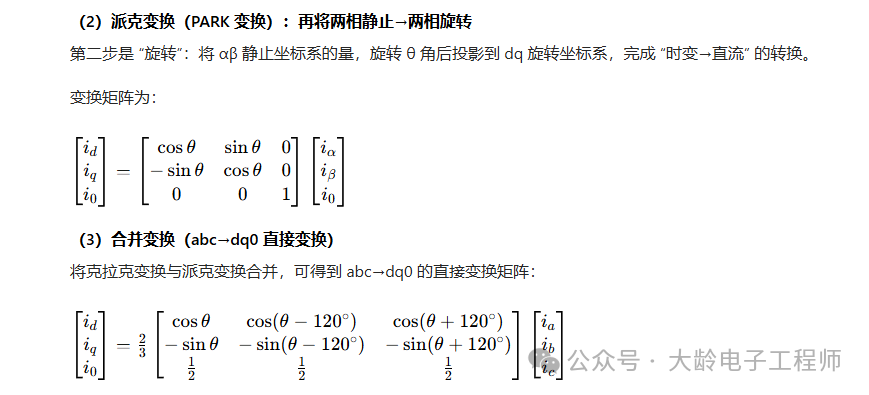
The PARK transformation is an orthogonal linear transformation, essentially projecting the vectors of the abc coordinate system (three-phase stationary, 120° apart) onto the dq0 rotating coordinate system (where the d and q axes are orthogonal and rotate with the rotor at angular velocity ω).
1. Definition of Coordinate Systems (Taking Synchronous Motors as an Example)
First, clarify the physical significance of the two key coordinate systems, which is the basis for understanding the transformation:
| Coordinate System | Type | Axis Definition | Characteristics |
|---|---|---|---|
| abc Coordinate System | Three-phase stationary coordinate system | a, b, c axes coincide with the motor stator A, B, C three-phase winding axes, 120° apart in electrical angle | Intuitive physical meaning, but variables vary sinusoidally with time |
| dq0 Coordinate System | Two-phase rotating coordinate system | – d-axis (direct axis): along the direction of the main magnetic flux generated by the rotor excitation winding – q-axis (quadrature axis): perpendicular to the d-axis, leading the d-axis by 90° electrical angle – 0-axis (zero-sequence axis): orthogonal to the d and q axes, with no physical corresponding magnetic circuit | Synchronously rotates with the rotor (angular velocity = rotor angular velocity ω), variables are DC quantities (in balance) |
3. Application Scenarios of PARK Transformation
The PARK transformation is the “cornerstone” of modern motor control and power system analysis, mainly applied in:
- Vector Control of AC Motors (VC): Such as high-performance control of asynchronous motors and permanent magnet synchronous motors (PMSM) (e.g., electric vehicle drives, industrial servo systems), using PARK transformation to “equate AC motors to DC motors” for precise torque and speed regulation.
- Synchronous Motor Excitation Control: Simplifying the excitation system model of synchronous motors, designing excitation regulators (AVR) to maintain grid voltage stability.
- Transient Analysis of Power Systems: Converting three-phase time-varying fault currents and voltages into dq DC quantities, simplifying the analysis of short-circuit faults and transient stability.
- Control of New Energy Grid-connected Inverters: Such as photovoltaic and wind power inverters, using PARK transformation to convert three-phase AC currents on the grid side into dq DC quantities for independent control of grid power (active and reactive).
4. Key Considerations
- Acquisition of Rotational Angle θ: The core of PARK transformation is “synchronous rotation”, requiring accurate acquisition of the rotational angle θ (i.e., the synchronization relationship between the dq coordinate system and the rotor):
- In scenarios with position sensors (e.g., servo motors): directly measuring θ through encoders or rotary transformers;
- In sensorless scenarios (e.g., electric vehicle drives): estimating θ through “sensorless algorithms” (such as sliding mode observers, extended Kalman filters), where the accuracy of θ directly determines control performance.
5. Conclusion
The essence of PARK transformation is to “eliminate time-varying coupling using a rotating coordinate system, equating AC systems to DC systems”, with its core value being:
- Mathematically: transforming nonlinear time-varying models into linear constant coefficient models, simplifying analysis and solution;
- Physically: achieving decoupling of torque and excitation, enabling high-performance motor control;
- Engineering-wise: serving as a “bridge” for modern AC motor control (vector control) and power system analysis, supporting technological development in fields such as electric vehicles, industrial servos, and new energy grid connections.
Understanding the key to PARK transformation lies not in rote memorization of the transformation matrix, but in grasping the logic of “from stationary to rotating” coordinate mapping and the physical significance of the d/q axes — this is the core foundation for subsequent learning of motor control algorithms.