Click the blue text
Follow the Association
Article Guide
Today, I will share with you the hardware interface and functions of the 6-axis stepper motor closed-loop EtherCAT motion controller ZMC432CL-V2.
1. Introduction to ZMC432CL-V2 Product
The ZMC432CL-V2 is a high-performance multi-axis motion controller compatible with EtherCAT bus and pulse type, featuring high-speed real-time feedback and supporting pulse closed-loop control, achieving high precision and high response speed in motion control. It provides high precision positioning, effectively eliminating mechanical transmission errors, meeting the requirements of high-precision processing application scenarios.
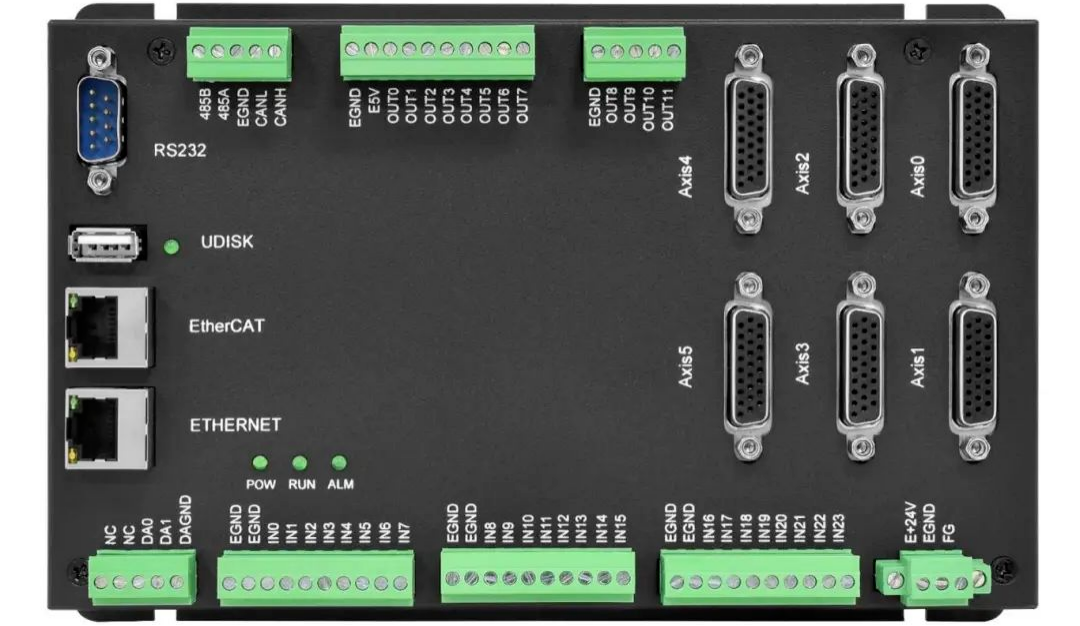
1. ZMC432CL-V2 Hardware Functions
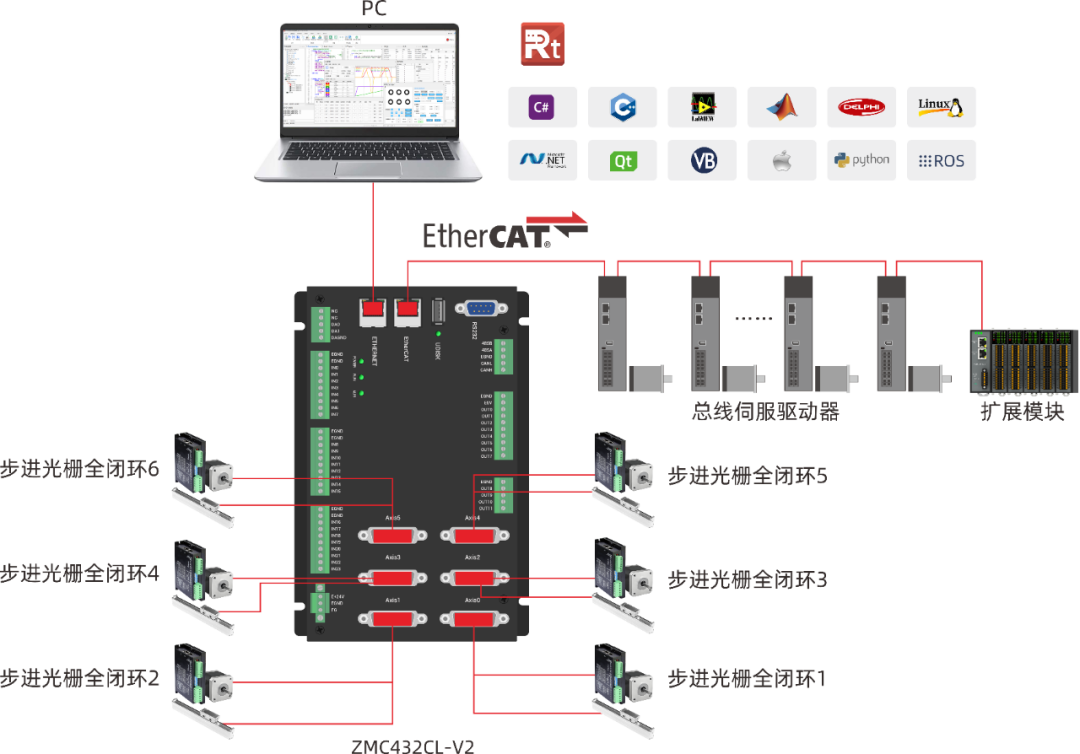
For more details about ZMC432CL-V2, click →Closed-loop solutions for stepper control with 32-axis EtherCAT bus motion controller ZMC432CL-V2.
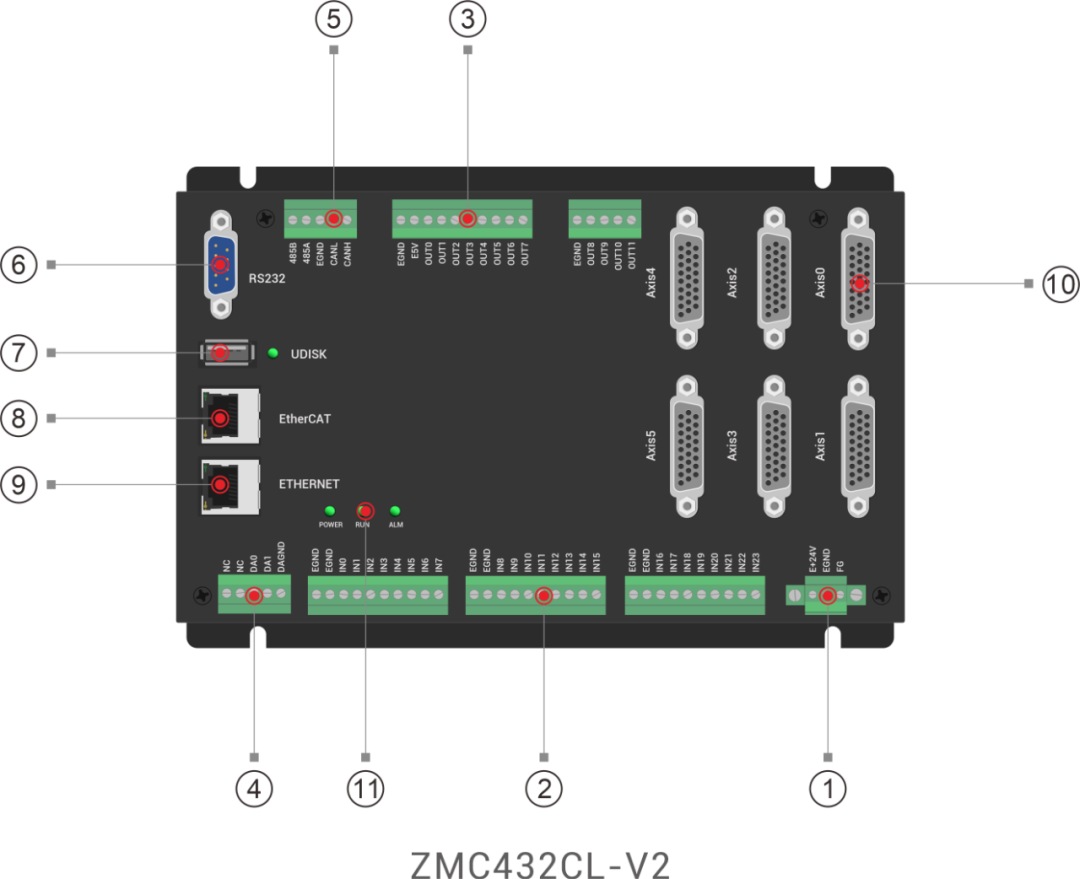
2. Hardware Interface
|
Serial Number |
Interface |
Description |
|
① |
Power Interface |
Connect to 24V DC power supply |
|
② |
General Digital IO Input Port |
NPN type, IN0-23, compatible with single-ended encoders, latching function |
|
③ |
General Digital IO Output Port |
NPN type, OUT0-11, compatible with single-ended pulse, HW, PWM functions |
|
④ |
Analog DA Port |
Single-ended type, 12bit, 0-10V |
|
⑤ |
CAN Bus Interface |
Connect to CAN expansion module to expand resources |
|
RS485 Interface |
Connect to host computer, using MODBUS_RTU protocol |
|
|
⑥ |
RS232 Interface |
Connect to host computer, using MODBUS_RTU protocol |
|
⑦ |
UDISK Interface |
Connect to USB flash drive for program upgrades, data import and export, etc. |
|
⑧ |
EtherCAT Bus Interface |
Connect to EtherCAT bus driver or other slave expansion modules, etc. |
|
⑨ |
EtherNET Port |
Connect to host computer, using MODBUS_TCP protocol, can be expanded through switches |
|
⑩ |
AXIS Differential Pulse Axis Interface |
Connect to servo driver, including direction pulse, encoder, dedicated digital IO |
|
⑪ |
Controller Status Light |
POW Power Indicator: Lights up when power is on |
|
RUN Running Indicator: Lights up during normal operation |
||
|
ALM Alarm Indicator: Lights up during operation errors |
3. Hardware Wiring
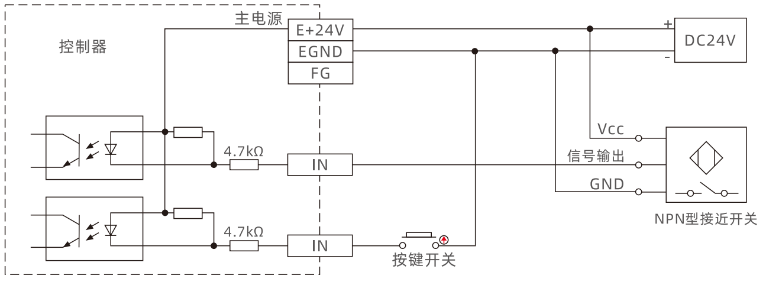
General wiring diagram for input ports
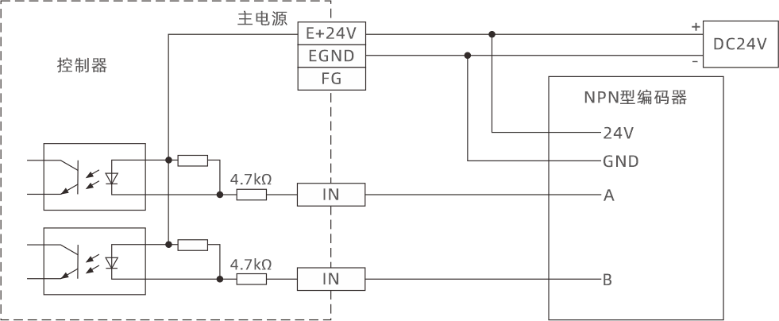
Single-ended encoder wiring diagram for input ports
2. Digital Output Wiring
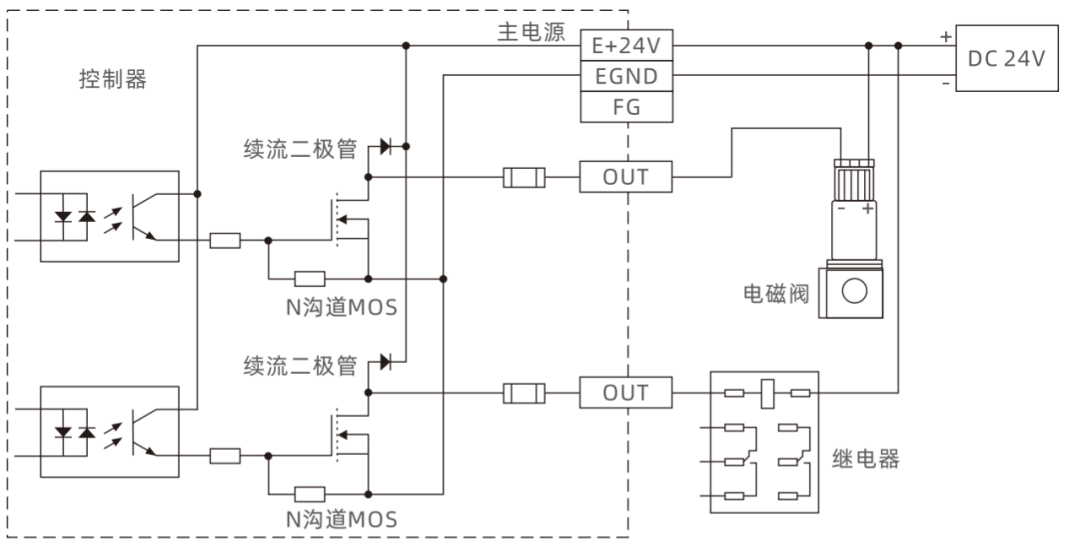
General wiring diagram for output ports
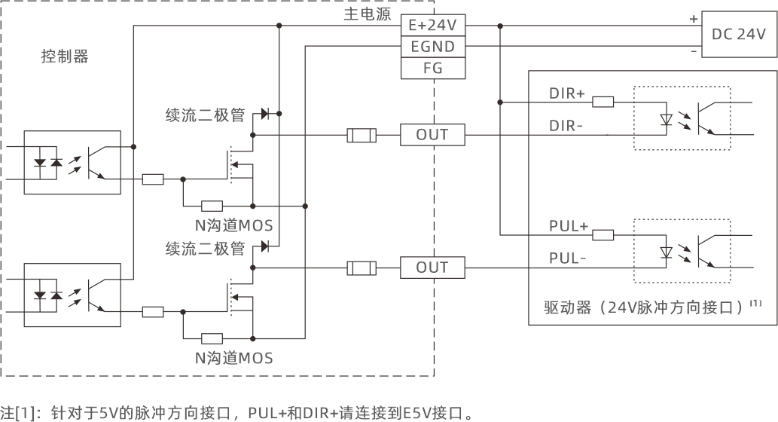
Single-ended pulse axis wiring diagram for output ports
4. Pulse Closed-Loop Applications

3. Pulse Closed-Loop Wiring
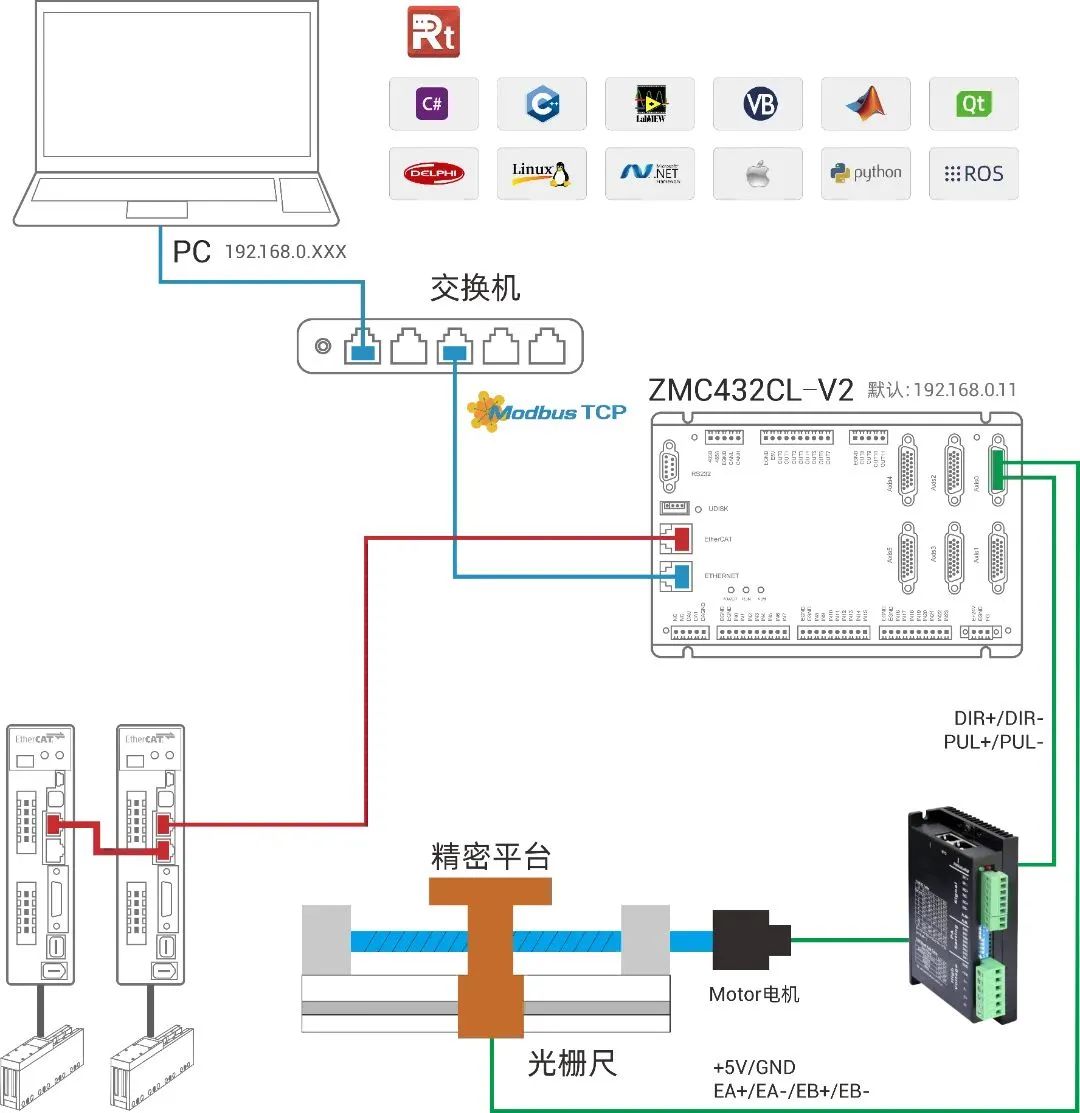
The ZMC432CL-V2 controller supports pulse sending DPOS and encoder feedback MPOS for all pulse axes Axis0~Axis5, and real-time closed-loop can be achieved through parameter settings for pulse sending and encoder feedback.
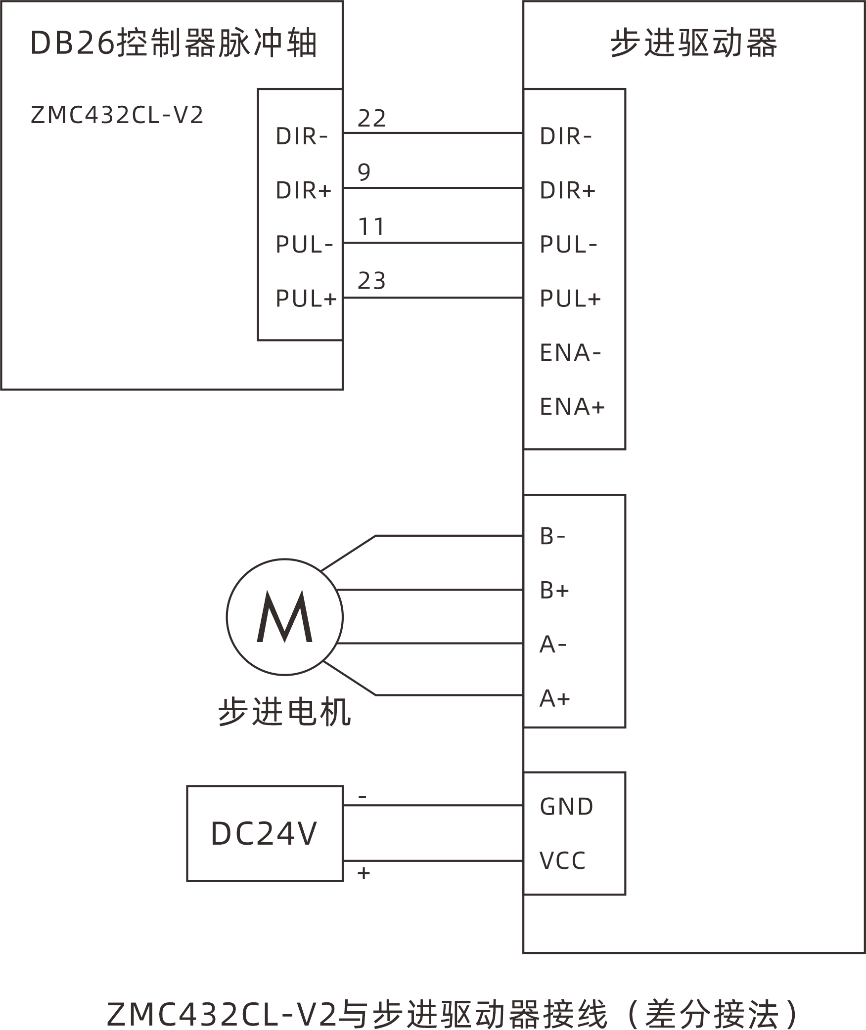
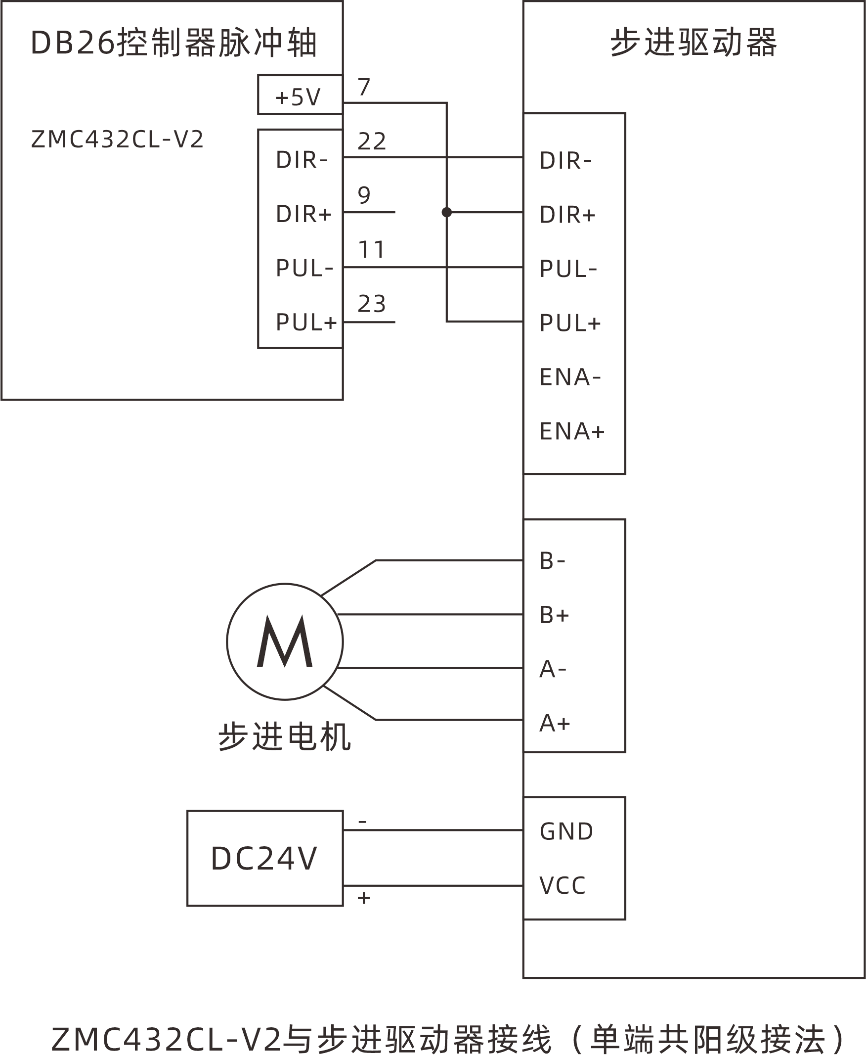
5. Stepper Driver Interface Wiring
2. ZMC432CL-V2 Wiring with Stepper Driver (Single-ended Common Anode Connection)
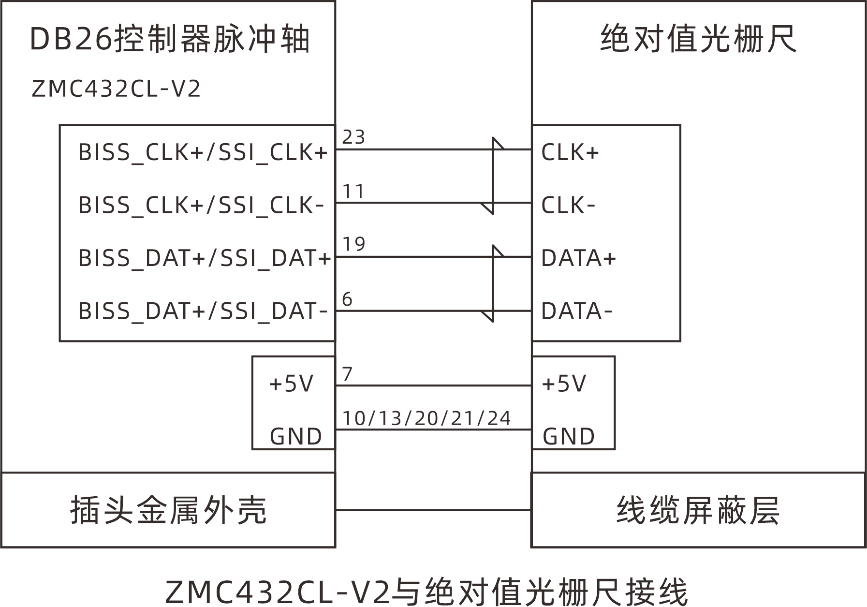
6. Grating Scale Interface Wiring
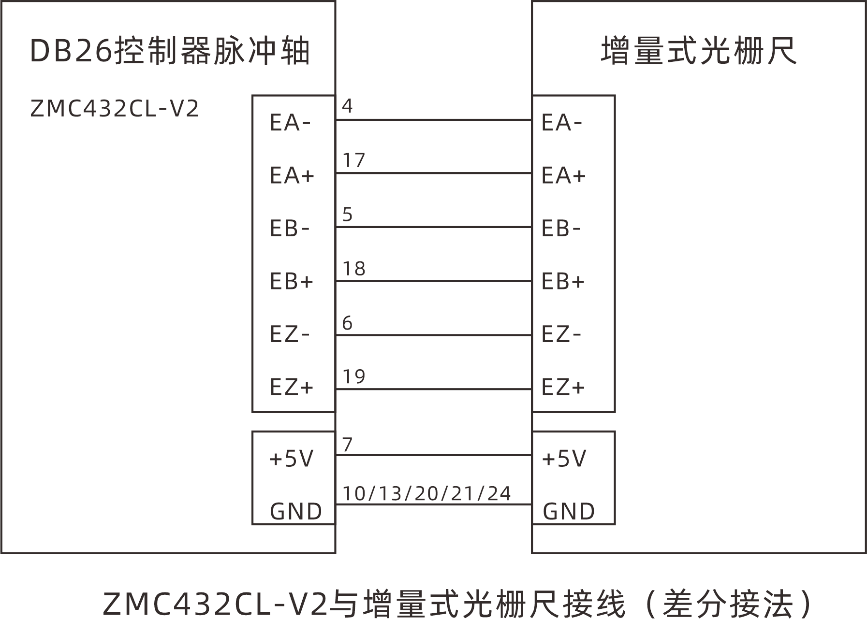
2. ZMC432CL-V2 Wiring with Absolute Grating Scale
7. Pulse Closed-Loop Test Code
The test program is as follows:
'/************************************************************'Task Number: None'Function: System Initialization'Input: None'Output: None 'Return Value: None'Remarks: None '*************************************************************/GLOBAL SUB SysInit() 'Test firmware information '?