


Registration: European Humanoid Robot Summit 2025
Abstract:NVIDIA R²D² technology in-depth analysis: How NeRD, Dexplore, and VT-Refine solve the core challenges of robot simulation – demonstration – perception? Including Sim2Real deployment data and toolkit, understand the industrial value of the three major breakthroughs in robot learning in one article.
1. Introduction: The Paradox of Robot “Simulation Frenzy” and “Reality Failures”
In the virtual workshop of NVIDIA Isaac Sim, the Franka robotic arm can achieve chip assembly with an accuracy of 0.01mm, with a success rate stabilizing at 96%; however, when transferred to the real production line, due to a deviation of 0.1 in the desktop friction coefficient and an increase of 80ms in camera delay, the success rate plummets to below 10%. This is not an isolated case, but a common dilemma in the field of robot learning — the three major pitfalls of “simulation – demonstration – perception” have become the “deadly three barriers” from laboratory to industrial implementation:
1. The “Dimensional Wall” between Simulation and Reality:
Traditional physics engines rely on formulaic calculations of mechanics, facing complex contacts such as “fingertips touching soft cloth” and “feet sinking into grass”, resulting in position deviations exceeding 15cm after 100 steps, while neural simulators require retraining for each scene due to poor generalization;
2. The “Incompatibility” of Human Demonstration:
The 27 degrees of freedom in human bottle cap twisting, when rigidly applied to a 16-degree-of-freedom robotic hand, either leads to joint jamming or uncontrolled force, causing the traditional transfer method to accumulate errors in three steps, resulting in total task failure;
3. The “Individual Warfare” of Multi-Sensory Perception:
When inserting a USB plug, vision is obstructed, and tactile feedback is absent, causing the robot’s “eyes” to misjudge and its “hands” to be unable to touch, with a pure visual strategy success rate of less than 50%.
At the 2025 CoRL conference, NVIDIA released the R²D² technology matrix (Neural Robot Development Digest), using three major neural innovations — NeRD, Dexplore, and VT-Refine — to achieve a closed-loop breakthrough of “simulation accuracy, demonstration fluency, and perception agility” for the first time. This article dissects this “robot evolution formula” based on empirical data and engineering cases.
2. NeRD: Neural Dynamics Engine, Enabling Simulation to “Learn to Generalize”
1. Breakthrough Point: The “Structural Failure” of Traditional Simulation
Traditional simulators are like precise but rigid “Swiss watches”: collision detection, dynamics solving, and other modules are intricately linked, but when faced with the complex contacts of high-degree-of-freedom robots, two major flaws are exposed:
-
Poor generalization of end-to-end models: Directly mapping “state – action – next state” requires memorizing scene details, and changing the ground friction coefficient renders it ineffective;
-
Insufficient accuracy of analytical models: Engines like MuJoCo exhibit over 5° of joint error in scenarios like “double pendulum sliding collision” after 100 steps, which cannot support precise training.
NeRD’s solution is: instead of reconstructing the simulator, simply replace the “most critical solver” to create a hybrid engine of “analytical framework + neural brain”.
2. Core Innovation: Two Designs to Solve the “Generalization and Accuracy Paradox”
1) Hybrid Prediction Framework: A Smart Solution that Only Replaces “Core Components”
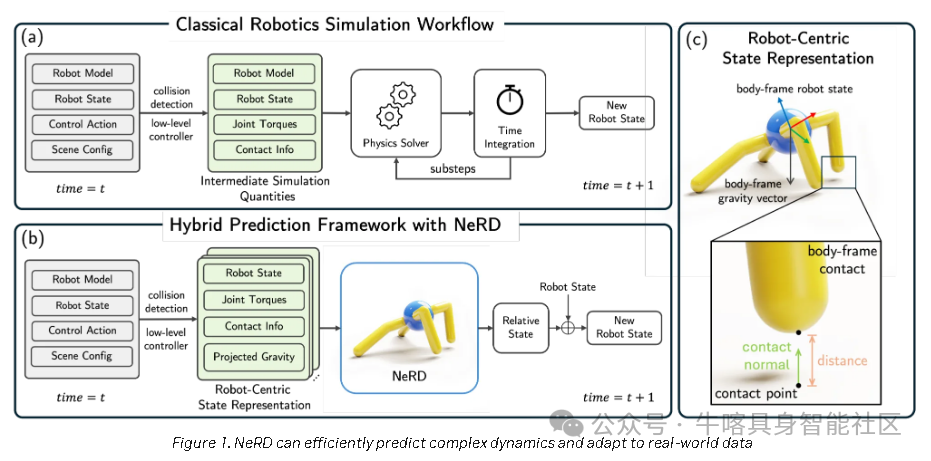
NeRD only replaces the application-irrelevant core modules in traditional simulators — the underlying dynamics and contact solvers, while retaining mature modules like collision detection and controllers (Figure 1). The brilliance of this design lies in:
-
Reusing intermediate simulation quantities (contact point positions, normal vectors, joint torques) to avoid scene overfitting in end-to-end models;
-
Switching the physics backend with a single line of code, seamlessly integrating into existing platforms like Isaac Gym and Warp.
2) Robot-Centric State Representation: Allowing the Model to “View the World from Its Own Perspective”
Based on the physical law that “robot dynamics remain invariant under spatial translation”, NeRD transforms all state quantities (joint angles, contact forces) into the robot’s base coordinate system. This design brings dual advantages:
-
Significantly improved generalization: No need to sample all spatial positions, a single model can adapt to seven types of double pendulum scenarios such as “non-contact chaotic motion”, “sliding contact”, and “collision stop”, with a maximum joint error of only 0.056 radians (3.2°) after 100 steps;
-
Data efficiency improvement: Training data volume reduced by 60%, with 100,000 random trajectories covering multiple contact scenarios.
3. Empirical Validation: Achieving “Zero-Sample Leap” from Simulation to Reality
Tests on six types of devices, including the ANYmal quadruped robot and Franka robotic arm, show that NeRD achieves a triple breakthrough in “accuracy – generalization – transfer”:
| Test Task | Traditional Simulator Performance | NeRD Performance | Core Improvement Points |
|
ANYmal Gait Stability |
1000 steps reward error 1.2% |
Error 0.08% |
Contact force prediction accuracy improved by 15 times |
|
Franka Reaching for Objects |
Real-world transfer success rate 71% |
Zero-sample transfer 92% |
Steady-state error as low as 1.927mm |
|
Ant Robot Running |
Reward error 8.7% |
Error 4.25% |
14 degrees of freedom dynamics modeling without bias |
|
Cube Throwing Fine-tuning |
Zero training requires 50 cycles |
Only 5 cycles needed after pre-training |
Position error reduced to 0.018m |
4. Deployment Boundaries: These Scenarios Still Need Refinement
-
Multi-robot collaborative scenarios (e.g., dual robotic arm assembly): Cross-contact prediction error increases to 0.5%, requiring optimization of multi-body dynamics modeling;
-
Edge deployment limitations: Requires Jetson Thor (2070 FP4 TFLOPS) to support real-time performance, with a 30% increase in latency on Jetson Nano.
3. Dexplore: Enabling Robots to “Understand” Human Actions and Adapt Flexibly
1. Essence of the Pain Point: Human Demonstration is Not a “Standard Answer”, but a “Reference Guide”
Using motion capture (MoCap) data of human operations directly for robots can fall into the “form imitation trap”:
-
Degree of freedom mismatch: Human fingers have 27 degrees of freedom vs. 16 for robotic hands, causing wrist rotation actions to jam directly;
-
Force perception absence: The “gradual force change” when humans squeeze a banana cannot be replicated by the robot’s force sensors;
-
Error accumulation: The traditional “redirecting → tracking → correcting” three-step method accumulates errors at each step, resulting in a final success rate of less than 60%.
Dexplore’s breakthrough lies in reconstructing the logic of demonstration learning: not forcing the robot to “copy homework”, but allowing it to “understand the thought process”.
2. Core Technology: The “Soft Constraint Magic” of Reference Range Exploration (RSE)
 RSE integrates transfer and exploration through “single-loop optimization”, achieving a leap from “imitating actions” to “learning intentions” (Figure 3):
RSE integrates transfer and exploration through “single-loop optimization”, achieving a leap from “imitating actions” to “learning intentions” (Figure 3):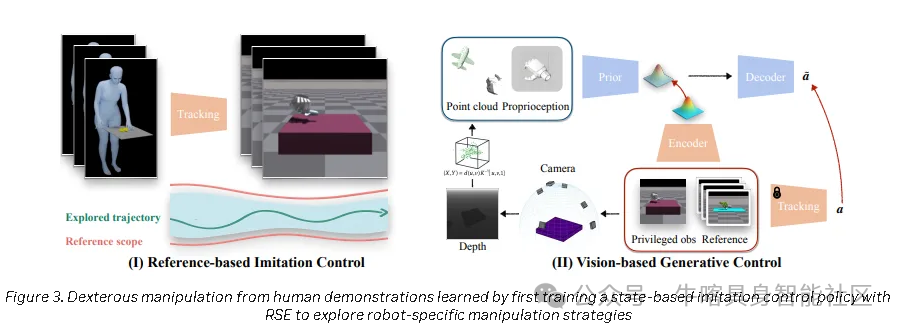
1) Demonstration Deconstruction: Extracting “Key Intent Nodes” (e.g., “finger contacts cup → stable grip → vertical lift”) from MoCap data, rather than the complete trajectory;
2) Range Definition: Setting “elastic boundaries” for each node (e.g., allowing ±15° deviation in finger joint angles during gripping), preserving adaptation space;
3) Strategy Exploration: Using the PPO algorithm to find the optimal action within the boundaries, neither deviating from human intentions nor exceeding the robot’s hardware limitations;
4) Visual Distillation: Transforming “joint data-dependent strategies” into “monocular depth map-driven strategies”, freeing from reliance on high-precision sensors.
3. Empirical Data: Success Rate of Dexterous Operations Soars by 20%
Tests on the Inspire and Allegro robotic hands show that Dexplore significantly outperforms traditional methods in scenarios involving soft objects and precision operations:
-
Grabbing a banana (soft object): from 65%→82% (avoiding squishing);
-
Twisting a water bottle cap: from 71%→90% (adapting to different torque requirements);
-
Removing a SIM card tray: from 58%→76% (dealing with part tolerances);
-
Untrained task (scooping yogurt): generalization success rate 72% (traditional only 49%), proving the learning of “operational logic” rather than “fixed actions”.
4. Deployment Scenarios: These Fields Will Benefit First
1) Home service robots: Assisting the elderly with eating and organizing items, where human demonstrations are easily accessible and flexibility in actions is highly required;
2) Industrial flexible assembly: Installing rubber seals, wiring harnesses, etc., where traditional teaching programming is difficult to implement, allowing for rapid transfer of human experience;
3) Medical assistance operations: Mimicking doctors’ needle-holding and suturing actions, adapting to the precision limitations of surgical robots.
4. VT-Refine: Enabling Robots to Achieve “Eye-Hand Coordination” and Assemble Parts Like Humans
1. Real-World Dilemma: Precision Assembly Relies on “Vision for the Visible, Touch for the Invisible”
When humans assemble a USB plug, they rely on “visual positioning + tactile adjustment” for closed-loop operation, but robots face “perception disconnection”:
-
Visual blind spots: When the plug approaches the socket, the camera is obstructed, making it impossible to judge pin alignment;
-
Lack of tactile feedback: Traditional force sensors can only measure “Newton-level” forces, unable to perceive “millimeter-level misalignment resistance”;
-
Data scarcity: Collecting data on “100 types of misaligned assemblies” in real scenarios costs over 100,000 yuan, and behavior cloning strategies generalize poorly.
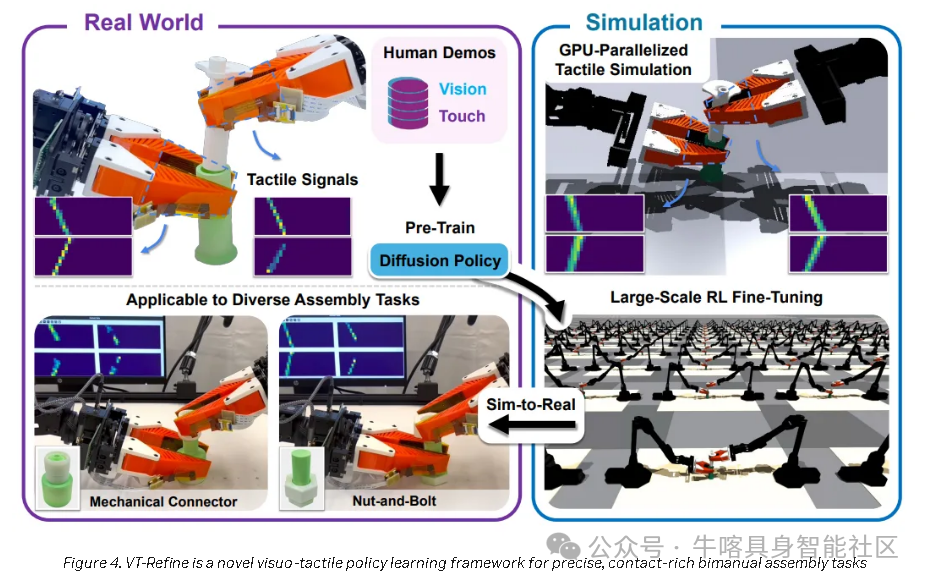
VT-Refine uses a “Real-Simulation-Real” (R-S-R) closed loop to fill the collaborative gap between “vision + touch”.
2. Technical Architecture: Three Steps to Achieve Integrated “Perception – Decision – Execution”
1) Real Demonstration Pre-training: Laying the Foundation with 30 Demonstrations
Collecting human assembly demonstrations while synchronously recording:
-
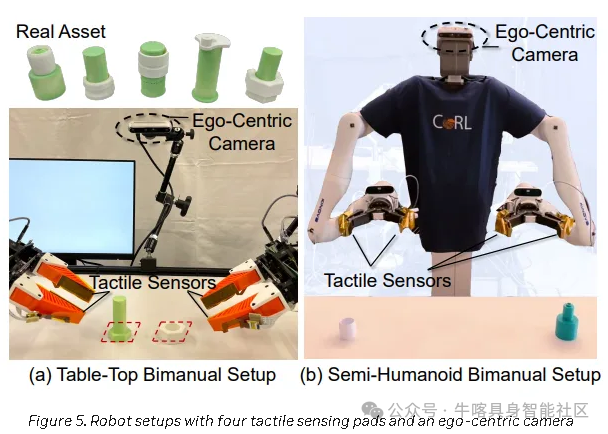
Visual data: ego camera 1280×720 point cloud (locating part positions);
-
Tactile data: 1024-dimensional pressure distribution from 4 TacSL sensor pads (perceiving contact details);
-
Joint data: 6 degrees of freedom position information of the robotic arm (controlling action precision). Based on this data, a visual-tactile diffusion strategy is trained to achieve “preliminary action planning”.
2) Large-scale Fine-tuning in Simulation: Practicing Tactile Feedback with 100,000 Trial-and-Error Attempts
Building a “digital twin scenario” in Isaac Lab, relying on the TacSL GPU-accelerated tactile library (200 times faster than traditional):
-
Generating 100,000 “misalignment scenarios” (plug offset by 5mm, tilted by 3°, etc.);
-
Using the SAC algorithm to practice “tactile feedback → action adjustment” reflex: adjusting angle with a resistance increase of 0.1N;
-
Incorporating domain randomization (material friction, lighting changes) to allow the strategy to “adapt to noise”.
3) Real-World Deployment: Error Control Within 0.2mm
Deploying the fine-tuned strategy to the Franka dual-arm robot, real-time fusion of multi-modal data:
-
Visual compensation: Using point cloud matching to predict the initial position of the plug;
-
Tactile dominance: Relying on pressure distribution to adjust posture during the contact phase, achieving alignment accuracy of 0.2mm.
3. Key Achievements: Success Rate Increased by 40%, Transfer Loss Only 8%
The breakthroughs of VT-Refine are reflected in the dual leap of “accuracy + generalization”:
-
Assembly success rate: Visual-tactile version from traditional 52%→92% (+40%), visual-only version from 52%→72% (+20%);
-
Simulation transfer loss: only decreased by 8% (traditional methods decreased by 25%), far exceeding industrial-grade requirements;
-
Tactile accuracy: TacSL library modeling error for silicone contact < 3% (traditional finite element method 15%).
4. Hardware Threshold: Essential Equipment List
| Device Type | Recommended Model | Core Function | Cost Reference |
|
Tactile Sensor |
SynTouch BioTac |
0.1g level pressure perception |
$5000 / per finger |
|
Computing Platform (Simulation) |
NVIDIA A100 (80GB) |
100,000 scene parallel training |
$40,000 / unit |
|
Edge Computing Platform |
Jetson Thor |
Real-time processing of point cloud + tactile data |
$3000 / unit |
|
Visual Sensor |
Intel D435i |
Ego perspective point cloud collection |
$300 / unit |
5. Technical Matrix Overview: How R²D² Restructures the Robot Learning Link?
The three major technologies are not isolated but form a complete closed loop of “simulation foundation → skill source → perception execution”:
| Technical Module | Core Problem Solved | Technical Foundation | Industrial Value | Next Generation Optimization Direction |
|
NeRD |
Simulation – Real Dynamics Deviation |
Hybrid Prediction + Transformer |
R&D cycle shortened by 80% |
Multi-body dynamics modeling for humanoid robots |
|
Dexplore |
Human Demonstration Cross-Robot Transfer |
RSE + Visual Strategy Distillation |
Programming costs reduced by 70% |
Mobile phone-captured MoCap data adaptation |
|
VT-Refine |
Multi-modal Perception Coordination Deficiency |
TacSL+R-S-R Closed Loop |
Precision assembly automation rate reaches 92% |
Adaptation for elastic parts (springs) assembly |
Synergistic Effect:Using NeRD to build high-fidelity simulation environments, importing human demonstrations with Dexplore, and practicing “eye-hand coordination” with VT-Refine — this combination has been implemented in NVIDIA Isaac Sim 2025.1, supporting rapid deployment of mainstream robots like Franka and ANYmal.
6. Developer Benefits: “Full-Link Support” from Technology to Implementation
1) Toolkit Download: NeRD integrated into Isaac Gym 2.5, Dexplore provides PyTorch reference implementation, VT-Refine relies on the TacSL library (available on NVIDIA Developer Platform);
2) Open Dataset: The AssemblyBench dataset (100,000 tactile-visual paired data) will be released soon, covering all scenarios of 3C assembly;
3) Competition Participation: The 2025 BEHAVIOR Challenge is open for registration, including 50 household tasks and 100,000 demonstration data, with winners receiving hardware support from NVIDIA;
END


 Click “Read the Original” for more
Click “Read the Original” for more