


Registration: European Humanoid Robot Summit 2025
Abstract:IEEE has released a standard framework for humanoid robots, focusing on classification, stability, and HRI (Human-Robot Interaction), coordinating SDOs (Standards Development Organizations) to establish standards, with large-scale deployment expected as early as 2027, facilitating the safe integration of humanoid robots into industrial, service, and public scenarios.
1. Analysis of the Core Content of the IEEE Humanoid Robot Study Group Standard Framework
Recently, the IEEE Humanoid Robot Study Group released the final draft of its research results earlier this week. The core mission of the group is to build a systematic framework for the standardization of humanoid robots, laying the foundation for their safe and effective deployment in industrial, service, and public domains.
1.1 Core Positioning of the Framework: Focusing on the Uniqueness of Humanoid Robots to Solve Cross-Scenario Deployment Challenges
Compared to humanoid robots, traditional industrial robots are often fixed to specific workstations and have single functions, with their safety standards and performance indicators being relatively mature; while service robots, although possessing some mobility, differ significantly in physical form and behavioral complexity from humanoid characteristics. The framework released by IEEE specifically addresses the unique risks and capabilities of humanoid robots for the first time—such as dynamic balance requirements, complex human-robot collaboration scenarios, and multi-domain adaptability—filling the gap in existing standards that inadequately cover “humanoid-shaped robots,” aiming to break down the “standard barriers” from technology development to practical application.
1.2 Three Core Standard Directions: Collaborative Construction of Classification, Stability, and Human-Robot Interaction (HRI)
The framework clarifies the three interconnected areas that Standards Development Organizations (SDOs) need to collaboratively advance, which together form the “cornerstone” of the humanoid robot standard system:
(1) Classification System: Establishing “Identity Labels” for Humanoid Robots, Laying the Foundation for Standard Adaptation
The core goal of the classification module is to establish a clear taxonomy, defining humanoid robots from four major dimensions:
-
Physical capabilities: including degrees of freedom (DOF), load capacity, movement speed, environmental adaptability (such as interference resistance, waterproof and dustproof ratings);
-
Behavioral complexity: covering levels of autonomous decision-making (such as pre-programmed execution, real-time adjustments based on sensors, multi-task dynamic planning), and maturity of AI algorithms (such as environmental perception accuracy, understanding of interaction intentions);
-
Application domains: clarifying sub-scenarios in industry (such as assembly, transportation), services (such as home care, medical assistance), and public scenarios (such as emergency rescue, public transport guidance);
-
Humanoid-specific features: such as humanoid appearance (head, torso, limb proportions), humanoid movement patterns (naturalness of walking, grasping actions);
The value of this classification system lies in its ability to help SDOs quickly identify the standard adaptation needs of different types of humanoid robots—for example, industrial humanoid robots need to focus on load stability standards, while home service humanoid robots need to prioritize human-robot interaction safety standards. It also provides a “common language” for enterprise R&D and user selection, avoiding standard duplication or gaps caused by ambiguous definitions.
(2) Stability Standards: Quantifying Dynamic Balance Indicators to Reduce Risks of “Humanoid Movement”
Compared to humanoid robots, traditional mobile robots (such as AGVs) rely on wheeled movement, making stability control relatively simple; whereas humanoid robots must simulate human “bipedal walking,” which poses significant challenges for dynamic balance. Once imbalanced, it may lead to equipment damage or personal injury. Therefore, the framework requires the establishment of quantifiable stability indicators, testing methods, and safety standards, specifically including:
-
Dynamic balance capability: such as walking stability on uneven surfaces (slopes, bumps), and balance maintenance ability under sudden external forces (such as collisions);
-
Fall response behavior: if balance cannot be maintained, a “fall cushioning” mechanism must be in place (such as adjusting limb posture to reduce impact) to avoid injury to itself and surrounding personnel;
-
Predictive risk modeling: using algorithms to anticipate potential imbalance scenarios (such as reduced movement accuracy due to low battery), triggering warnings or safe shutdowns in advance.
(3) Human-Robot Interaction (HRI) Norms: Building a “Safe and Trustworthy” Collaborative Foundation
The core application scenarios of humanoid robots often involve “close collaboration with humans” (such as home care, factory assembly assistance), and their HRI design directly relates to user safety and acceptance. The framework clarifies that HRI standards need to focus on three major directions:
-
Safety of collaborative tasks: such as having force feedback and collision detection functions when operating the same equipment with humans, avoiding excessive force that could lead to injury;
-
Behavioral interpretability: the robot’s actions and decisions must be “understandable to humans”—for example, by using voice or light prompts for the next operation to avoid user panic caused by ambiguous behavior;
-
User training systems: providing usage training guidelines for different scenarios (such as home users, factory operators) to help users master risk management methods (such as emergency shutdown operations), while guiding users to establish reasonable risk expectations.
2. Background of the Framework Development: A 60-Person Cross-Disciplinary Team Overcomes the Challenge of “Aligning Diverse Voices” Over One Year
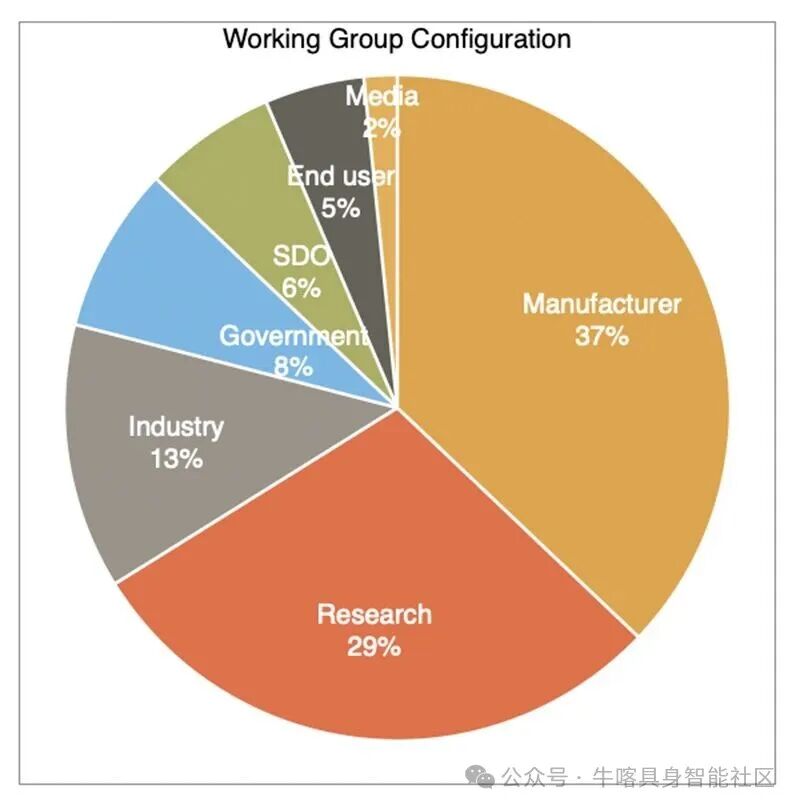
2.1 Working Group Composition: Covering the Entire Industry, Academic, and Regulatory Chain
The framework was jointly completed by a working group of over 60 people, led by Aaron Prather, Director of the Robotics and Autonomous Systems Project at ASTM International. The working group includes industry leaders (such as humanoid robot manufacturers and downstream application companies), academic researchers (experts in robot dynamics and AI algorithms), and regulatory agency representatives, ensuring that the framework meets both technical realities and market demands and safety regulatory requirements.
2.2 Working Process: Multi-Stage Advancement through Research, Interviews, and Debates
The working group completed the framework development over the course of a year, with core work stages including:
-
Market research: analyzing the current development stage of humanoid robot technology (such as prototypes, small-scale pilot applications), mainstream manufacturers’ technology routes (such as hydraulic drive, motor drive), and market demand pain points (such as safety concerns, high costs);
-
Stakeholder interviews: in-depth communication with robot manufacturers (to understand R&D challenges) and end users (such as manufacturing companies, elderly care institutions, to clarify application needs), extracting standard priorities;
-
Multiple rounds of debates: discussing key controversial points (such as whether the minimum degrees of freedom for humanoid robots should be set as a standard, and the environmental simulation range for stability testing) to reach a consensus.
2.3 Core Challenge: Aligning Diverse Demands in the Context of “Rapid Technological Iteration”
Aaron Prather mentioned in an interview that the biggest difficulty in formulating the framework was “coordinating diverse voices”: “The industry is concerned about whether standards will limit the speed of technological innovation, academia emphasizes the scientific and forward-looking nature of standards, and regulatory agencies prioritize safety bottom lines—everyone has different priorities. Our task is to distill these demands into shared recommendations while not losing key details; it’s like ‘building a bridge on shifting terrain’ because humanoid robot technology itself is rapidly iterating.”
3. Future Implementation of the Framework: Transitioning from “Guidelines” to “Standards” Will Take 18-36 Months, with 2027 Expected to Mark the Start of Large-Scale Deployment
3.1 Framework Positioning: A “Starting Line” Rather than an “End Line”
It should be clarified that the framework released this time is not the final standard; its core goal is to help SDOs identify gaps in existing standards—for example, traditional robot stability standards do not cover bipedal walking, and HRI standards do not consider “user psychological responses triggered by humanoid appearance.” As Prather stated: “This report is a starting line, not an end line. The next step is to convert recommendations into specific standards, testing protocols, and certification pathways. The key is to ensure that these standards evolve in sync with technology, not only keeping pace with the development of humanoid robots but also guiding their safe integration into human spaces.”
3.2 Standard Formulation Timeline: 18-36 Months to Complete Ratification, with Large-Scale Deployment Expected by 2027
Prather stated that the transition from the framework to the final “effective standard” will undergo two key phases:
(1) Transition Phase (12-24 Months):Each SDO will develop specific standards for subfields based on the framework (for example, IEEE may lead the HRI standard, while ASTM focuses on stability testing methods), forming specialized teams to tackle technical details;
(2) Approval Phase (6-12 Months):Completing the public announcement of standards, soliciting opinions, and final ratification.
Overall, the standard formulation work is expected to take 18-36 months. This means that even if some companies already have humanoid robot technology reserves, large-scale deployment will not occur until 2027 at the earliest—because before the new standards take effect, companies cannot ensure the safety of robots in “human-robot collaboration scenarios,” making it difficult to pass market access and user trust thresholds.
4. Current Status of the Humanoid Robot Market: In the “Early Adoption Phase,” Standards Are Key to “Crossing the Chasm”
4.1 Market Phase Positioning: According to the “Crossing the Chasm” Model, It Is Necessary to Break Through the Bottleneck from “Early Adopters to Early Majority”
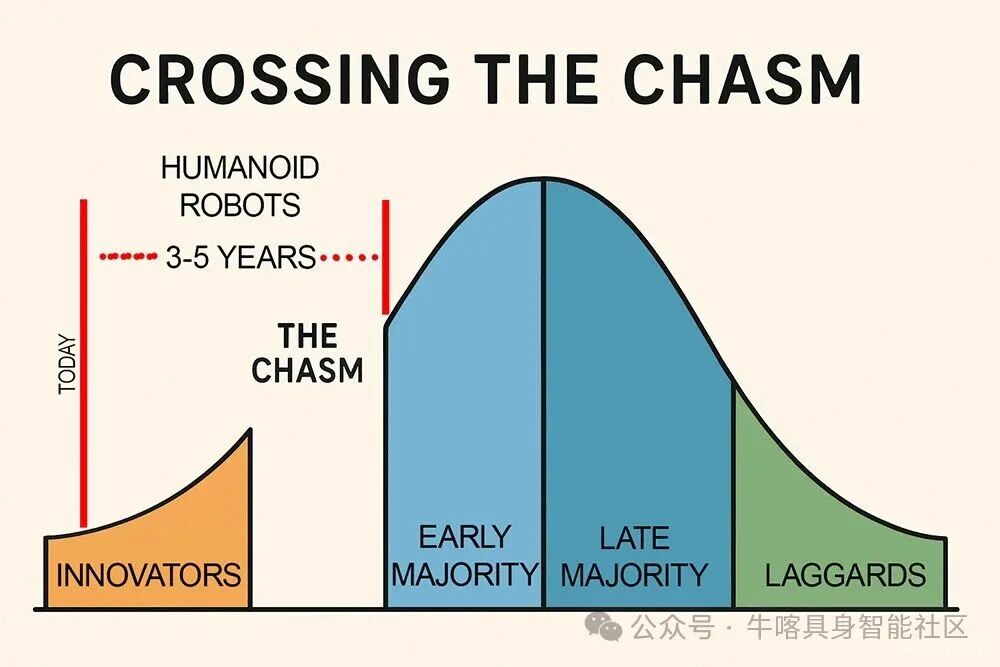
According to the classic “Crossing the Chasm” model, the market penetration of technological products must go through five stages: “Innovators → Early Adopters → Early Majority → Late Majority → Laggards.” Currently, the humanoid robot market is in the “early adoption phase”—a few daring companies (such as some automotive manufacturers and high-end elderly care institutions) have begun small-scale pilots, but have not yet entered the “early majority” stage (where mainstream companies and the general public widely accept them). To “cross the chasm” into the early majority stage, the core prerequisite is to solve the “safety trust” issue—by clarifying the safety performance and operational norms of robots through standards, allowing mainstream users (such as small and medium-sized manufacturing enterprises and ordinary households) to believe that the risks are controllable. The value of the IEEE framework lies in providing standardized support for “safety trust,” helping the market break through growth bottlenecks.
4.2 Current Core Technical Gap: Insufficient AI Training Data, Standard Window Period Provides Buffer
In addition to standards, another key challenge facing humanoid robots is the shortage of AI training data—robot environmental perception and behavioral decision-making rely on a large amount of real-world scenario data (such as object recognition in different home environments, collaboration processes in different industrial scenarios), but currently, the industry’s data accumulation is limited, making it difficult for AI performance to meet complex scenario demands. The 2-3 year window period required for standard formulation provides companies with a “buffer time”: companies do not need to rush to launch immature products to “seize market opportunities” but can use this time to accumulate training data, optimize AI algorithms and mechanical structures, achieving “product performance meeting standards when they take effect,” avoiding the cost waste of “products needing to be iterated after standards are implemented.”
5. Analysis of the Advantages and Disadvantages of the IEEE Standard Framework
5.1 Core Advantages: Systematic, Coordinated, and Forward-Looking, Filling Industry Gaps
(1) Systematic: The First Comprehensive Standard System for Humanoid Robots, Covering Lifecycle Needs
Previously, discussions on standards for humanoid robots in the industry were often scattered across single fields (such as focusing only on mechanical safety or HRI), lacking overall planning. This framework constructs a standard foundation for the entire chain from “classification → stability → HRI” based on three core dimensions, clearly defining “what is a humanoid robot,” specifying “what safety performance it should have,” and “how to interact safely with humans,” effectively avoiding issues of “redundant construction” or “omission of key links” in standard formulation by SDOs.
(2) Coordination: Coordinating Global SDO Resources to Avoid “Standard Fragmentation”
Currently, there are many organizations globally engaged in robot standard formulation (such as IEEE, ASTM, ISO, etc.). If each organization acts independently, it may lead to “regional standard differences” and “industry standard conflicts,” increasing compliance costs for enterprises (for example, a robot needs to meet different standards in multiple countries). The IEEE framework provides a basis for collaboration by clarifying the division of labor in the “three core areas,” helping to promote standard unification globally and reduce overall compliance costs in the industry.
(3) Forward-Looking: Balancing Current Needs and Technological Evolution to Avoid “Standard Lag”
The framework does not impose “rigid specifications” on technical indicators (such as mandating a specific type of sensor) but focuses on “goals and methods” (such as “dynamic balance must be achieved, specific testing methods can be adjusted with technological evolution”), meeting current safety needs while reserving space for future technological innovations (such as new drive technologies, more advanced AI algorithms), avoiding the problem of “standards becoming obsolete due to technological iteration as soon as they are implemented.”
(4) Market-Oriented: Based on Research and Interviews, Ensuring Standards Align with Practical Applications
The working group ensured that every recommendation in the framework stems from actual needs through a year of market research and interviews with manufacturers and users—for example, including “uneven surface testing” in stability standards is due to the common presence of uneven floors in factory workshops and home environments; emphasizing “behavioral interpretability” in HRI norms is because user feedback indicated that “sudden robot movements can cause panic.” This approach of “coming from the market and going back to the market” makes standards easier for enterprises to accept and implement, avoiding “talking on paper.”
5.2 Potential Disadvantages: Long Formulation Cycle, Implementation Depends on Multi-Party Coordination, Difficult to Address Market “Urgent Needs” in the Short Term
(1) Long Standard Implementation Cycle May Lag Behind Some Enterprises’ R&D Progress
As mentioned earlier, the time from framework to final implementation of standards takes 18-36 months, while some leading enterprises (such as Agility Robotics, Boston Dynamics) have already launched humanoid robot prototypes close to commercialization and even started small-scale pilots. For these companies, a long standard cycle may lead to “technical idleness”—that is, products may have commercial capabilities but cannot be widely promoted due to a lack of standard support, missing short-term market opportunities.
(2) Implementation Depends on SDO Coordination, There Is a Risk of “Execution Efficiency” Issues
The implementation of the framework requires close cooperation among global SDOs (such as IEEE, ASTM, ISO), but if there are disagreements in division of labor and priorities (for example, one organization wants to prioritize advancing HRI standards while another wants to establish stability standards first), it may lead to delays in standard formulation. Additionally, some regions or industries may introduce “regional supplementary standards” based on their own interests, further increasing the difficulty of standard unification.
(3) Complex Classification System, Small and Medium Enterprises May Face “Compliance Cost Pressure”
The classification system in the framework involves multiple dimensions (physical capabilities, behavioral complexity, application domains, etc.), and enterprises need to apply for corresponding certifications based on their product positioning against the classification standards—large enterprises can handle compliance requirements through professional teams; however, for small and medium-sized robot companies, the complex classification and certification processes may bring high time and financial costs, potentially becoming a “barrier” to market entry.
6. Recommendations for the Humanoid Robot Industry: Enterprises and Investors Should Use “2027” as a Time Anchor to Formulate Long-Term Strategies
For humanoid robot enterprises, it is necessary to abandon the mindset of “short-term market capture” and use “2027 standard implementation” as the core time anchor, focusing on three key tasks:
-
First, adjust product R&D directions based on the IEEE framework (such as prioritizing optimization of dynamic balance and HRI functions);
-
Second, accumulate real-world AI training data to enhance product performance stability;
-
Third, communicate with SDOs in advance and participate in the standard formulation process to ensure minimal compliance costs for products.
For investors, it is essential to recognize the “long-term nature” of the humanoid robot industry and avoid pursuing “short-term returns”—it is recommended to extend the investment cycle to after 2027, focusing on companies whose product development aligns with the IEEE framework direction and have data accumulation capabilities, rather than simply pursuing companies with “technical gimmicks.”
END


 Click “Read the Original” for more information
Click “Read the Original” for more information