


Registration: European Humanoid Robot Summit 2025
Abstract:The TECS algorithm addresses the operational pain points of agricultural robots! It adapts to both soft and hard soil, dynamically adjusts traction strategies in real-time, saves 22% more energy compared to traditional PID, extends battery life by 2-3 hours, and achieves more precise plowing depth. This article explains the core solution for enhancing energy efficiency and operational effectiveness in agricultural machinery.
First, let’s discuss the core pain points of agricultural robot operations:
-
When working in the field, soft soil can cause wheel sinking, while hard soil can lead to wheel spinning, which not only delays work but also consumes a lot of energy;
-
Traditional controllers either cannot keep up with soil changes or have high energy consumption.
The “Tillage and Energy Control System (TECS algorithm)” that this article will analyze in depth is specifically designed to solve these problems with an “intelligent solution.” This article will explain its design logic, practical effects, and comparative advantages step by step, highlighting its strengths.
The Core Logic of the TECS Algorithm: Making Robots “Understand Soil and Save Energy”
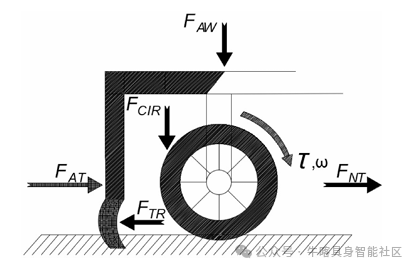
The key to agricultural robot operations is actually “interacting with the soil”—the varying hardness of the soil leads to different traction requirements and energy consumption for the wheels. The core of the TECS algorithm is to enable the robot to “perceive” the soil state in real-time and dynamically adjust its operational strategy, ensuring sufficient traction (to avoid wheel sinking and stalling) while minimizing energy consumption (to extend battery life).
1. First, solve the “Understanding Soil” problem: Conducting a “Dynamic Checkup” on Soil
Previously, soil state was primarily assessed based on “soil hardness” (measured by cone penetration index CI), but the TECS algorithm goes further by introducing the concept of “Soil Fluidity Index (Bn).” In simple terms, it combines several key parameters: soil hardness (CI), wheel width, wheel diameter, and the total load of the robot (including its own weight and the weight of the tillage tools). By correlating these parameters, it accurately determines how much support the soil can provide to the wheels— for example, soft soil has weak support, so the wheels cannot rotate too quickly to prevent sinking; hard soil has strong support, allowing for increased speed but avoiding spinning.
Through this “dynamic checkup,” TECS can match different soils with the “optimal slip ratio” (a state where the wheels slightly slip without wasting power): the optimal slip ratio for soft soil (CI=450kPa) is about 0.11, for medium-hard soil (CI=900kPa) about 0.12, and for hard soil (CI=1750kPa) about 0.13. This value is not arbitrary but derived from extensive field tests, balancing “traction” and “energy consumption” perfectly.
2. Next, solve the “Adjustment” problem: Dynamic Balance of Traction and Energy Saving
During robot operations, the scene is constantly changing—sometimes strong traction is needed (for example, in hard soil with gravel, where tillage tools can easily get stuck), and sometimes energy saving is required (for example, in soft soil with low resistance). The TECS algorithm has designed a “self-adaptive slip rate” strategy, akin to equipping the robot with an “intelligent switch”:
-
When strong traction is needed (for example, in hard soil operations where there is a risk of wheel stalling), the algorithm prioritizes ensuring the “maximum traction slip rate,” providing enough power to overcome resistance and prevent the tillage tools from stalling;
-
When operations are stable (for example, in soft soil with uniform tillage), the algorithm switches to “energy-saving slip rate,” reducing ineffective wheel slip and minimizing energy consumption.
This switching is not manual but automatically determined by the “speed tracking rate”—if the actual speed of the robot deviates significantly from the target speed (for example, if it is sinking), it prioritizes traction; if the speed is stable, it prioritizes energy saving. Actual tests show that this strategy can reduce energy consumption by 15%-30% compared to traditional methods, naturally extending battery life.
3. Finally, solve the “Interference Resistance” problem: Responding to Sudden Situations in the Field
The most troublesome aspect of field operations is sudden situations—such as suddenly hitting a rock, which increases the wheel load abruptly. Traditional controllers often “cannot react in time,” leading to speed fluctuations or even deviation. The TECS algorithm addresses this issue by adding “fuzzy PID control”: in simple terms, it can respond flexibly like an experienced farmer—once it detects a sudden change in load (for example, a fluctuation of ±15%), it immediately adjusts the core parameters of the controller (proportional, integral, and derivative coefficients) to stabilize the wheel speed quickly.
For example, during tests on hard soil with gravel, traditional PID controllers can experience speed fluctuations of ±0.23m/s, while the TECS algorithm can control fluctuations within ±0.11m/s, significantly reducing deviation and improving operational precision.
II. Measured Data: How Well Does TECS Perform in Three Types of Soil?
It is not enough to just discuss logic; let’s look at the actual field test results—the research team conducted tests at Afyon Kocatepe University in Turkey, selecting three typical farmland types: soft soil, medium-hard soil, and hard soil (with gravel), comparing the performance of “no control,” “traditional PID control,” and “TECS algorithm.” The data is very straightforward:
| Soil Type | Control Method | Maximum Speed (m/s) | Time to Reach Target Speed (s) | Average Energy Consumption (W) | Plowing Depth Consistency (cm) |
|
Soft Soil |
No Control |
1.44 |
8.28 |
2460.52 |
±3.2 |
|
Soft Soil |
Traditional PID Control |
1.91 |
6.95 |
2253.55 |
±2.7 |
|
Soft Soil |
TECS Algorithm |
1.97 |
5.93 |
1801.95 |
±1.8 |
|
Medium-Hard Soil |
No Control |
0.98 |
16.50 |
3750.42 |
±4.1 |
|
Medium-Hard Soil |
Traditional PID Control |
1.84 |
6.55 |
3540.78 |
±3.5 |
|
Medium-Hard Soil |
TECS Algorithm |
2.07 |
7.81 |
3225.63 |
±2.1 |
|
Hard Soil |
No Control |
1.15 |
12.25 |
5198.65 |
±5.2 |
|
Hard Soil |
Traditional PID Control |
1.93 |
6.51 |
4892.37 |
±4.0 |
|
Hard Soil |
TECS Algorithm |
2.14 |
7.85 |
4603.22 |
±2.5 |
Let’s translate this data into practical operational benefits:
-
Faster and more stable speeds: In soft soil, TECS is 0.06m/s faster than PID, with a time to reach speed reduced by 1 second; in hard soil, the maximum speed is 0.21m/s faster than PID, improving work efficiency;
-
Significantly reduced energy consumption: In soft soil, TECS saves 20% energy compared to PID, and in hard soil, it saves 6%. Assuming 8 hours of work per day, with the same battery, TECS can till 10%-15% more land;
-
More precise operations: Plowing depth consistency is better than PID; for example, in medium-hard soil, the depth fluctuation decreased from ±3.5cm to ±2.1cm, leading to more uniform crop growth and easier subsequent management.
III. Comparing Traditional Solutions: Three Core Advantages of TECS
Compared to commonly used traditional control solutions (such as pure PID and simple slip control), the advantages of the TECS algorithm are not “minor improvements” but “full-chain optimizations,” mainly reflected in three aspects:
1. Stronger Soil Adaptability: Works Anywhere
Traditional PID control parameters are “fixed”; once the parameters for soft soil are set, they do not work for hard soil—either the power is insufficient (the robot cannot move in hard soil) or there is excess power (the wheels sink in soft soil). TECS, relying on the “Soil Fluidity Index,” can assess soil conditions in real-time, automatically matching the optimal strategy for soft, medium-hard, or hard soil with gravel, avoiding the hassle of “one setting for each soil type.” Field tests show that TECS can control speed errors within 2% across three soil types, while PID can have errors of up to 15% in hard soil.
2. Higher Energy Efficiency: Fast Work and Energy Saving
For agricultural robots, “battery life” is crucial—if the battery runs out, they have to return to recharge, delaying work. The TECS “self-adaptive slip rate” strategy perfectly resolves the conflict between “speed” and “energy saving”: it can increase speed when needed and save energy when not needed. Compared to traditional PID, TECS consumes an average of 22% less energy for the same work area, extending battery life by 2-3 hours, equivalent to tilling an additional 20-30 acres in a day.
3. Lower Engineering Implementation Costs: Minimal Modification Costs, Easy to Promote
Many advanced technologies are great but have high modification costs, making them unaffordable for farmers. The TECS algorithm is different—it does not require replacing the core hardware of the robot; it only needs to add an “encoder” (to measure wheel speed) and load the algorithm program. Calculations show that the modification cost for a single robot only increases by about 12%, far lower than visual navigation or laser radar solutions (which increase costs by over 35%), making it affordable for ordinary agricultural cooperatives.
IV. Current Limitations and Future Improvement Directions
Of course, the TECS algorithm is not “perfect” and still has areas for improvement. The research team has also proposed future improvement directions:
1. Soil Type Coverage is Not Comprehensive Enough
Currently, tests have only been conducted on “soft, medium-hard, and hard” soils, but there are many special soils in actual farmland—such as high-moisture clay in the south (which sinks easily), desert sandy soil in the northwest (which is particularly loose), and black soil in the northeast (which freezes in winter). The characteristics of these soils differ from those tested, and TECS needs to further optimize parameters in these scenarios.
2. Real-Time Learning Capability Needs Enhancement
Currently, TECS parameters are “pre-set”; although they can adjust in real-time, they cannot “learn autonomously”—for example, when encountering a previously unseen mixed soil (half soft, half hard), it can only adjust according to existing strategies and cannot “learn from past operational data.” Future improvements could incorporate machine learning algorithms, allowing it to accumulate “soil-strategy” experience and enhance adaptability.
3. Multi-Machine Collaboration Has Not Been Addressed
Currently, tests have only been conducted on “single robots,” but actual large-scale operations often require multiple robots to work together (for example, one for tilling and one for planting). In the future, if the TECS algorithm can be expanded to “multi-machine collaboration,” allowing multiple robots to share soil data and allocate operational tasks, overall efficiency could be significantly improved.
V. Conclusion: The Significance of the TECS Algorithm for Agricultural Automation
From our discussion, it is clear that the TECS algorithm is not a “flashy technology” but a genuine solution to the “pain points” of agricultural robots: it transforms robots from “only able to work according to fixed programs” to “able to flexibly adjust based on soil conditions,” thereby improving operational efficiency while reducing energy consumption and modification costs.
For those involved in agricultural automation, this means that in the future, whether in flat fields, hilly terraces, or different soil types, robots can “just show up and work” without repeated adjustments; for farmers, affordable, energy-efficient, and high-efficiency intelligent agricultural machinery is one step closer to practical application.
As soil type coverage becomes more comprehensive and learning capabilities improve, the TECS algorithm may even integrate with GPS navigation and multi-machine collaboration, becoming the “core brain” of agricultural robots—one can look forward to a future where robots can work efficiently while saving energy costs, truly helping farmers save time and effort.
END


 Click “Read the Original” for more
Click “Read the Original” for more