Modicon M241 is a compact, high-performance, and scalable mid-range PLC, fully embodying Schneider Electric’s concept of “flexible device control.” It is designed specifically for industrial control applications, primarily targeting engineering project applications, providing high-performance electrical control solutions for logical control, speed control, positioning control, and complex network construction.
Lexium 28 is a newly launched bus-type servo drive, designed for simple and cost-effective solutions, featuring automatic motor identification for quick installation, sharing the DC bus, optimizing equipment energy consumption during operation, and built-in safety function module STO, offering cost-effective safety solutions. Standardized control interfaces, such as pulse sequence, +/-10V speed control, CANopen, and CANmotion communication interfaces, simplify the integration of Lexium 28 servo with machine architecture, making it suitable for all solutions from coordinated motion control to synchronous motion control.
This article mainly introduces how to control the operation of LXM28 through M241, providing an operational reference for beginners.
1. Somachine Hardware Configuration
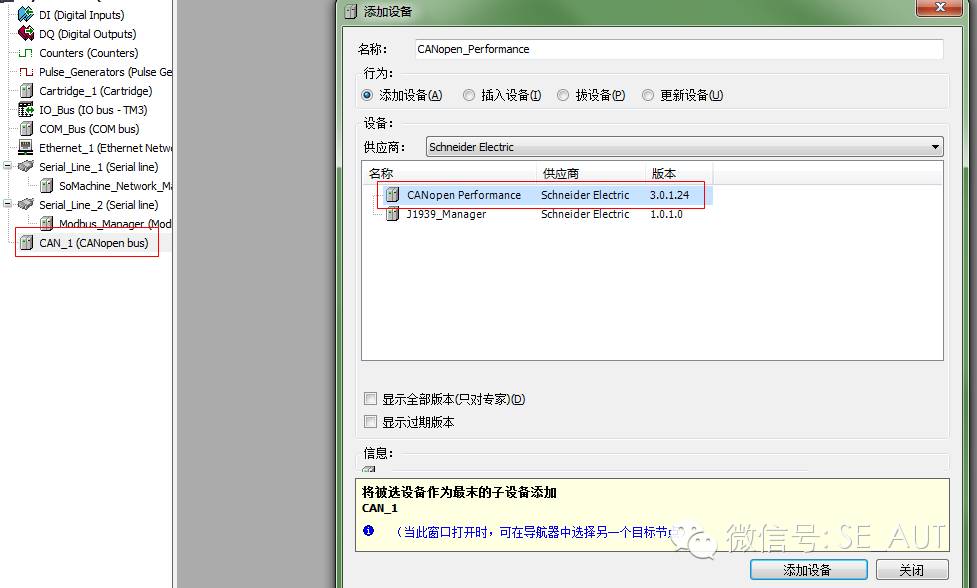
1. Add CANopen Performance under CAN_1
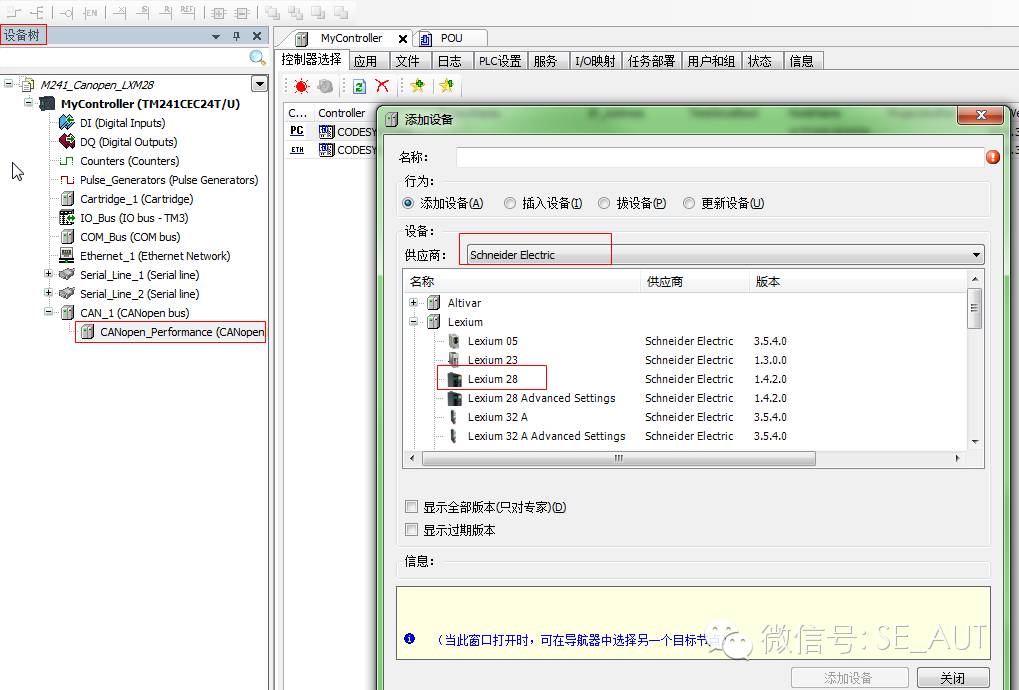
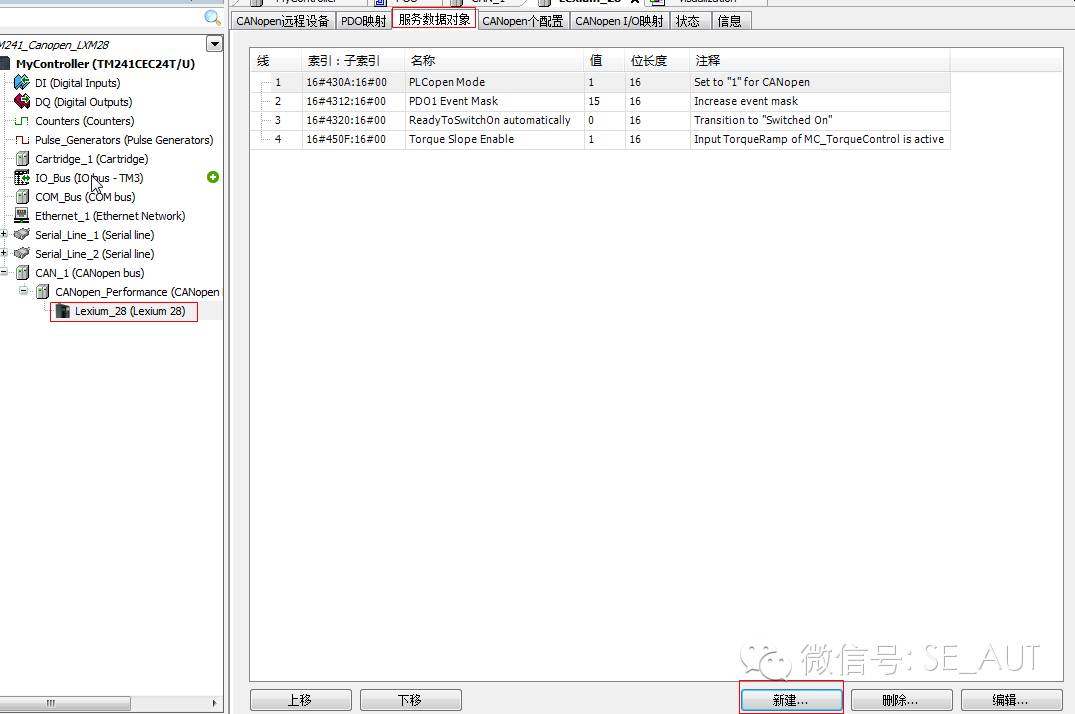
2. Add Lexium 28 under CANopen Performance
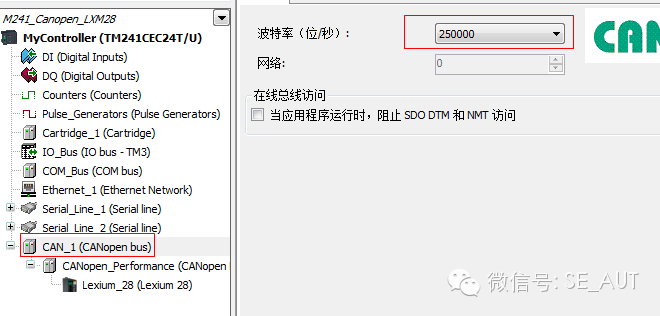
3. Double-click CAN_1 to set the baud rate
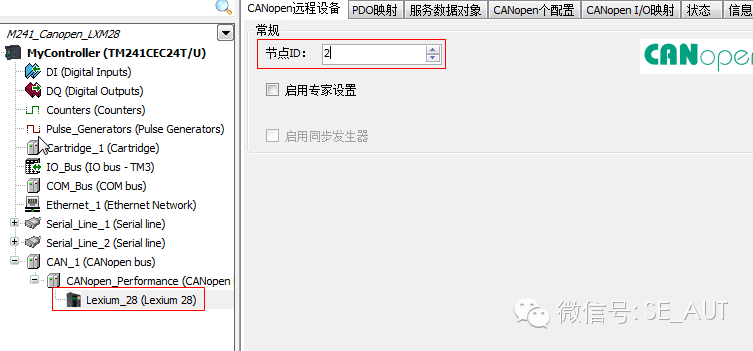
4. Double-click Lexium 28 to set the node address
2. Servo Drive Parameter Settings
P1-01=0000b (Control mode is canopen)
P3-01=102 (Baud rate 250kb/s)
P3-05=2 (Node address is 2)
3. Program Implementation
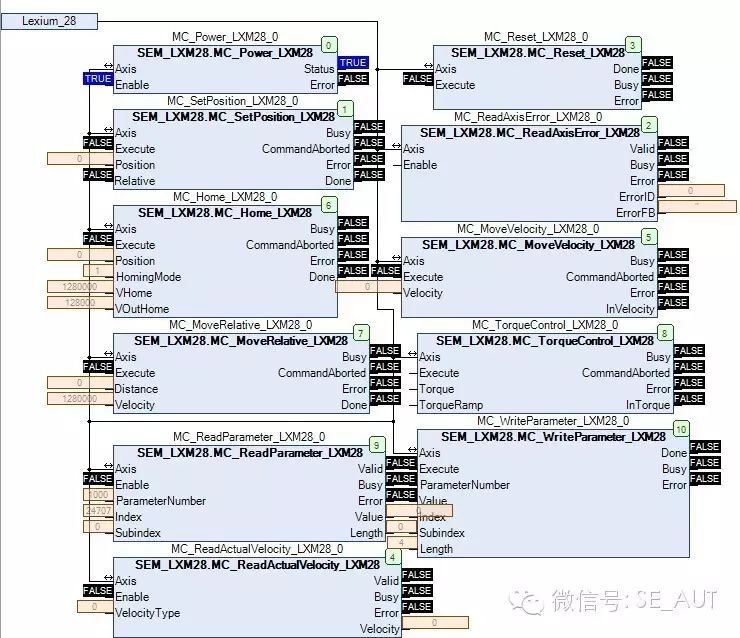
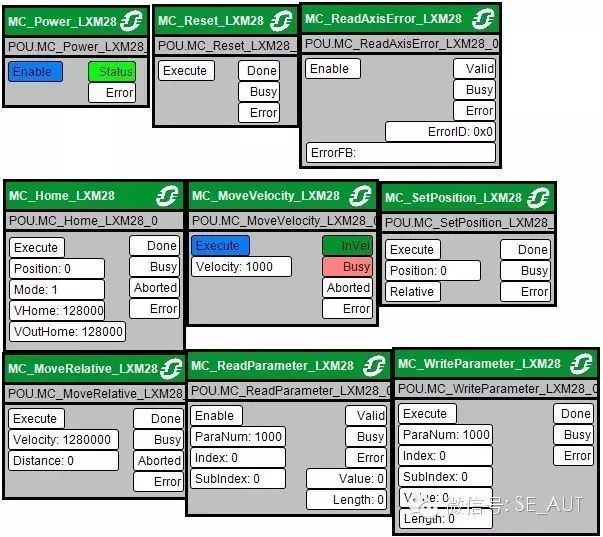
4. Notes
LXM28 is generally consistent with the earlier LXM23A in functionality, but there are some subtle differences in control.
1. Electronic Gear Ratio Settings
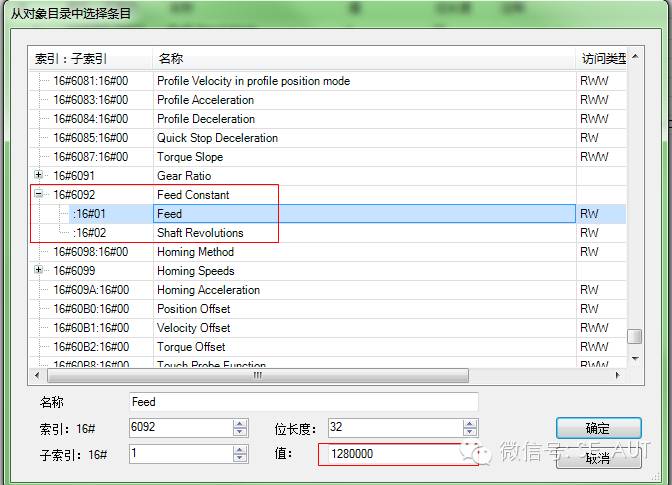
16#6092:01 defaults to 1280000, 16#6092:02 defaults to 1, meaning that the motor needs 1280000 pulses to rotate one revolution.
If you need 10000 pulses to rotate one revolution, simply set 16#6092:01 to 10000.
Note that 16#6092:01 and 16#6092:02 are not analogous to the numerator 16#6093:01 and denominator 16#6093:02 in LXM23A.
2. Acceleration and Deceleration Settings
The motion function blocks in the Lexium 28 Library do not have acceleration and deceleration pins, so users need to set acceleration and deceleration themselves.
There are two ways to do this:
(1) Set 16#4122:0 and 16#4123:0
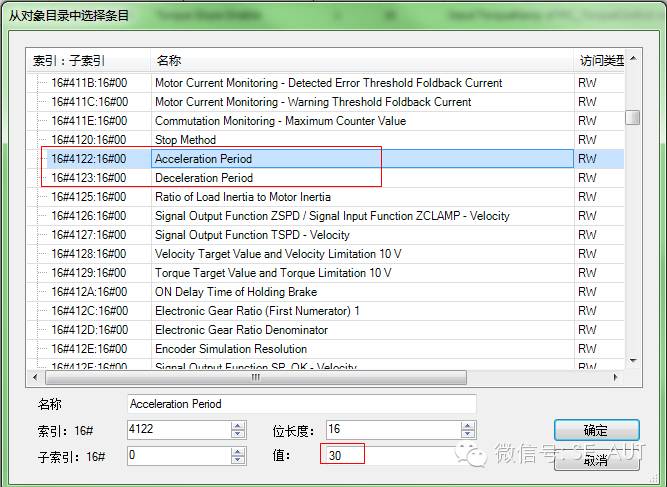
16#4122:00 defaults to 30, with the unit being ms, indicating the time required to accelerate the motor from a stop to 6000rpm.
(2) Set 16#6083:0 and 16#6084:0
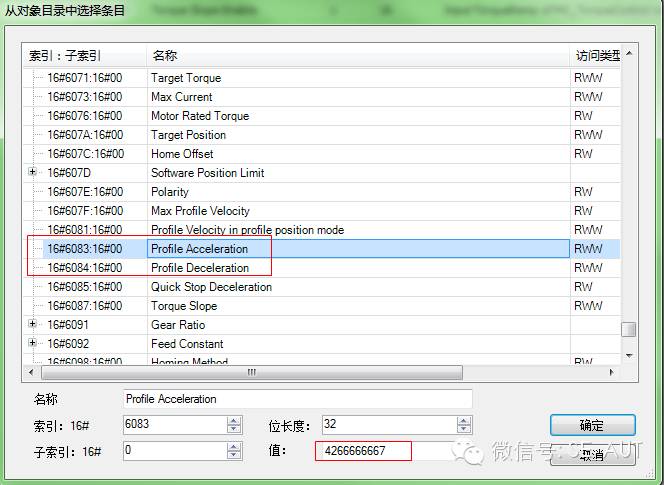
16#6083:00 defaults to 4266666667, with the unit being puu/s2, indicating the speed change rate per second.
3. Speed Units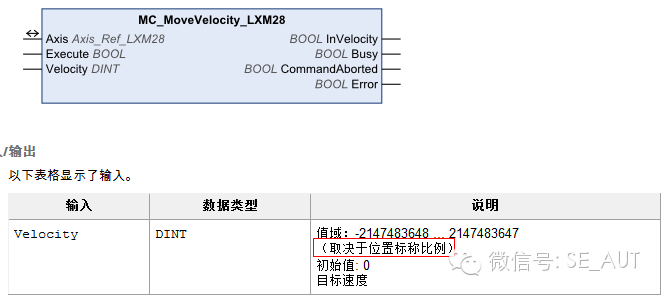
Note that the speed unit here is different from LXM23, with the default position ratio of 1280000 pulses for one revolution of the motor, meaning that when Velocity=1280000, 1280000 pulses are sent per second, corresponding to the motor rotating one revolution, resulting in 60 revolutions per minute, with an actual speed of 60rpm.
PS. If you need this routine, please enter the keyword “LXM28 routine” in the public account information bar to obtain it.