DOI: 10. 3969 / j. issn. 1009-9492. 2019. 12. 006
LUO Runxin, YU Liuping, LIANG Hanfeng, et al. Chassis Design of Wheeled Mobile Robot Based on Arduino [J]. Electromechanical Engineering Technology, 2019, 48(12):21-22.
Funding Project: Guangdong Province Science and Technology Plan Project (No: 2016B090927010); Guangdong Province General Higher Education Characteristic Innovation Project (Natural Science) (No: 2018KTSCX163); Guangdong Second Normal University Key Discipline of Network Engineering (No: ZD2017004)
Chassis Design of Wheeled Mobile Robot Based on Arduino
LUO Runxin, YU Liuping, LIANG Hanfeng, WU Yilin, ZHANG Qian
(Guangdong University of Education, Guangzhou 510800)
Abstract: With the rapid development of science and technology, robots are becoming more and more important in our production and life. Wheeled mobile robots perform well in indoor environments. A chassis design scheme of wheeled mobile robots based on Arduino was proposed. ESP8266 was selected as the main control chip, which was small in size, cheap in price, easy to use, and supports WiFi. The chassis adopts the driving mode of double-wheel drive and differential steering, and realizes closed-loop control by measuring the speed of the motor and PID control algorithm, which can correct the deviation in time and avoid deviating from the preset orbit. The chassis uses the rosserial protocol to communicate with the host computer ROS through the WiFi function of ESP8266. The chassis is lightweight and low-cost, which provides a chassis design scheme for low-cost indoor wheeled mobile robots.
Key words: Arduino; mobile robot chassis; ESP8266; ROS
Classification Number: TP242 Document Identification Code: A
Article Number: 1009-9492 (2019) 12-0021-02
Chassis Design of Wheeled Mobile Robot Based on Arduino
LUO Runxin, YU Liuping, LIANG Hanfeng, WU Yilin, ZHANG Qian
(Guangdong University of Education, Guangzhou 510800, China)
Abstract: With the rapid development of science and technology, robots are becoming more and more important in our production and life. Wheeled mobile robots perform well in the indoor environment. A chassis design scheme of wheeled mobile robots based on Arduino was proposed. ESP8266 was selected as the main control chip, which was small in size, cheap in price, easy to use, and supports WiFi. The chassis adopts the driving mode of double-wheel drive and differential steering, and realizes closed-loop control by measuring the speed of the motor and PID control algorithm, which can correct the deviation in time and avoid deviating from the preset orbit. The chassis uses the rosserial protocol to communicate with the host computer ROS through the WiFi function of ESP8266. The chassis is lightweight and low-cost, which provides a chassis design scheme for low-cost indoor wheeled mobile robots.
Key words: Arduino; mobile robot chassis; ESP8266; ROS

Introduction
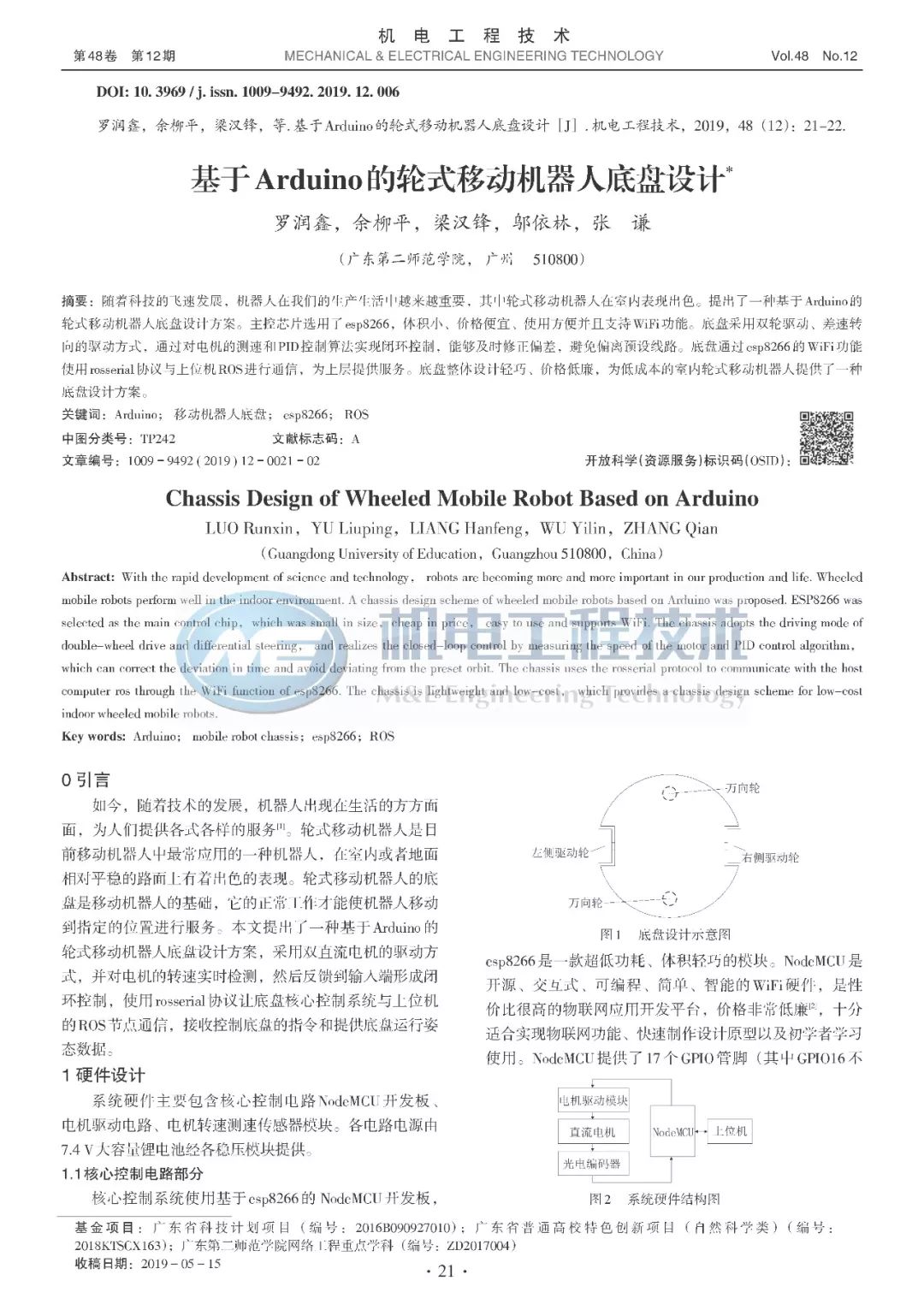
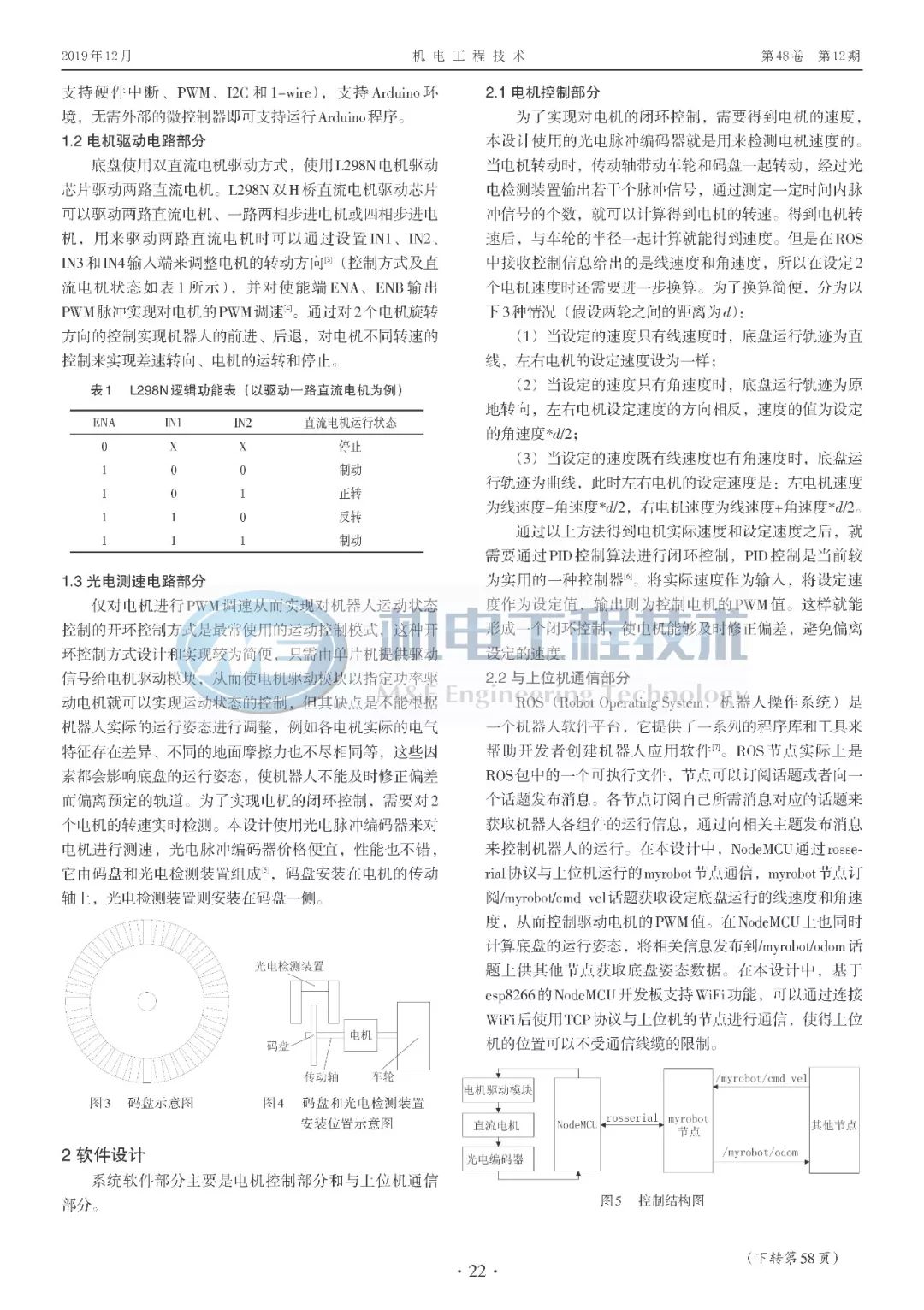
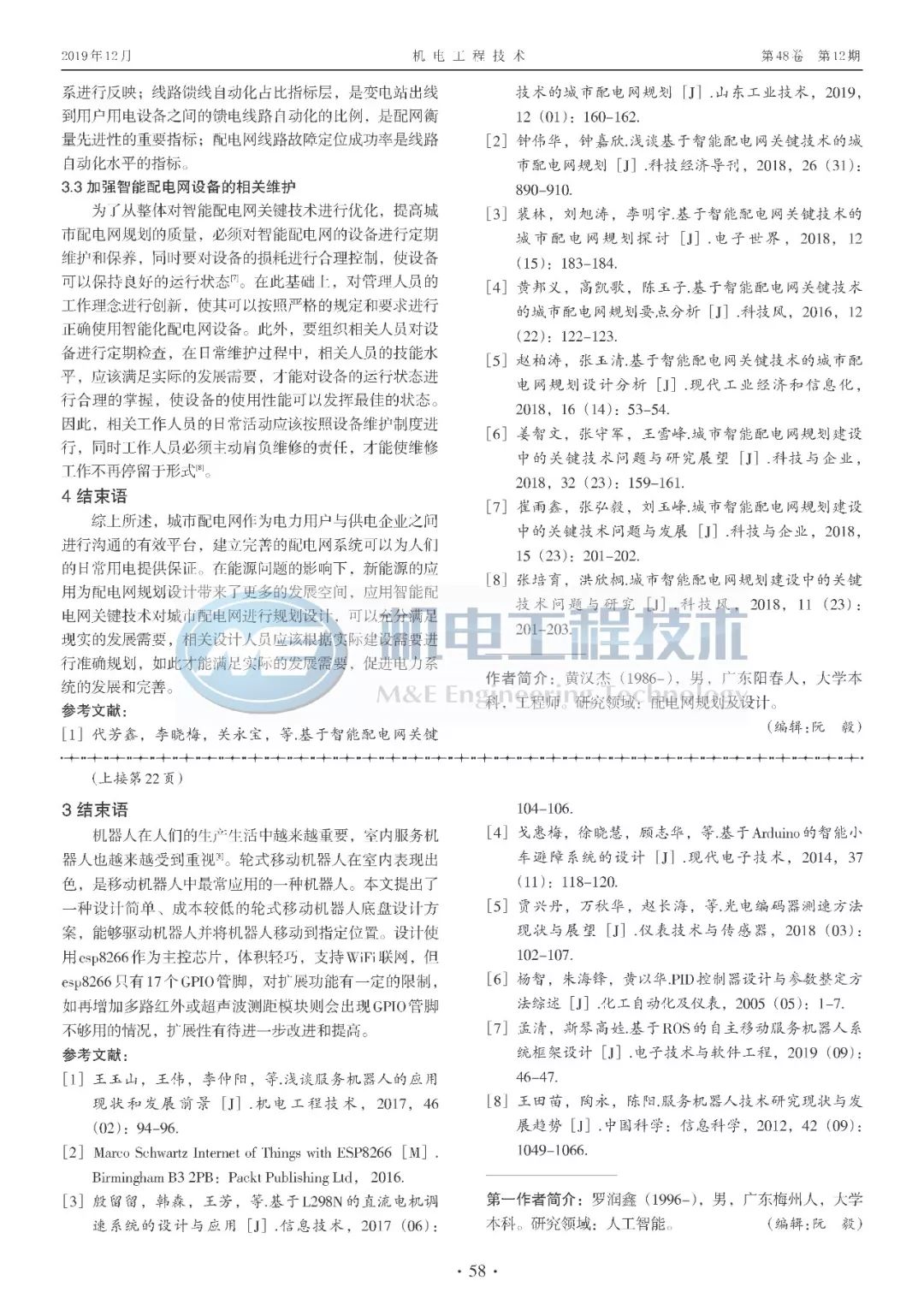
Today, with the development of technology, robots are appearing in various aspects of life, providing people with various services. Wheeled mobile robots are currently the most commonly used type of mobile robot, performing excellently on indoor or relatively flat ground. The chassis of wheeled mobile robots is the foundation of mobile robots, and its normal operation enables the robot to move to designated positions for service. This paper proposes a chassis design scheme of wheeled mobile robots based on Arduino, adopting a double DC motor driving method, and real-time monitoring the motor speed, then feeding back to the input end to form closed-loop control, using the rosserial protocol to enable communication between the chassis core control system and the host computer ROS node, receiving control commands for the chassis and providing data on the chassis’s operational posture.
Conclusion
Robots are becoming increasingly important in people’s production and life, and indoor service robots are receiving more attention. Wheeled mobile robots perform excellently indoors, being the most commonly used type of mobile robot. This paper proposes a simple and low-cost design scheme for the chassis of wheeled mobile robots, enabling the robot to drive and move to designated positions. The design uses ESP8266 as the main control chip, which is lightweight and supports WiFi networking, but the ESP8266 only has 17 GPIO pins, which limits the expansion of functions. For example, if additional infrared or ultrasonic distance measuring modules are added, there may be insufficient GPIO pins, and the expandability needs further improvement.
Welcome to submit!
Welcome to reprint!
Welcome to subscribe!
Welcome to advertise!
Welcome to project cooperation!

↓ Online Submission System ↓

