To treat hemiplegic patients with unilateral paralysis, a bilateral rehabilitation system using bilateral or unilateral assistive robots has been developed. However, the challenge of promoting coordination between bilateral limbs with flexible robot assistance remains to be addressed. The research team at Kagawa University has published a paper titled An EMG‑Based Biomimetic Variable Stiffness Modulation Strategy for Bilateral Motor Skills Relearning of Upper Limb Elbow Joint Rehabilitation in the Journal of Bionic Engineering. This paper proposes a biomimetic variable stiffness modulation strategy for variable stiffness actuators (VSA) integrated robots to enhance bilateral limb coordination and promote the relearning of bilateral motor skills. The study establishes an electromyographic (EMG) coordinated reference stiffness estimation model for the upper limb elbow joint, reproducing muscle coordination effects on the affected limb through independent real-time stiffness control. Additionally, bidirectional impedance control is combined to achieve flexible interaction between the patient and the robot. Preliminary studies examined the impact of multitasking intensity on the relearning of bilateral motor skills. Experimental results indicate that this method can facilitate the relearning of high-intensity bilateral motor tasks, further enhancing coordination between bilateral limbs.
The research team at Kagawa University has published a paper titled An EMG‑Based Biomimetic Variable Stiffness Modulation Strategy for Bilateral Motor Skills Relearning of Upper Limb Elbow Joint Rehabilitation in the Journal of Bionic Engineering. This paper proposes a biomimetic variable stiffness modulation strategy for variable stiffness actuators (VSA) integrated robots to enhance bilateral limb coordination and promote the relearning of bilateral motor skills. The study establishes an electromyographic (EMG) coordinated reference stiffness estimation model for the upper limb elbow joint, reproducing muscle coordination effects on the affected limb through independent real-time stiffness control. Additionally, bidirectional impedance control is combined to achieve flexible interaction between the patient and the robot. Preliminary studies examined the impact of multitasking intensity on the relearning of bilateral motor skills. Experimental results indicate that this method can facilitate the relearning of high-intensity bilateral motor tasks, further enhancing coordination between bilateral limbs. 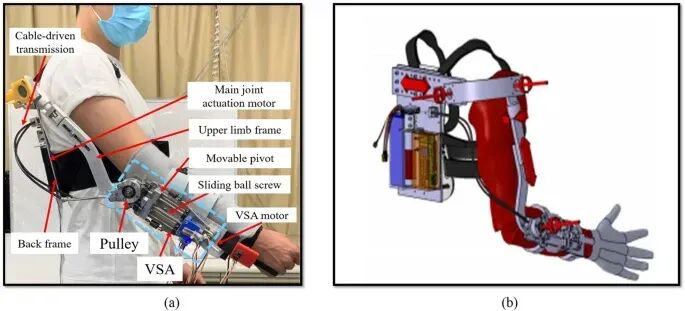 Figure 1 Mechanical design of PVSED: (a) Prototype of PVSED worn by the subject; (b) Adaptive design for individual body shapes of the subject. To achieve high adaptive independent stiffness adjustment for elbow joint motion assistance rehabilitation training, improvements were made based on previous work. The designed PVSED is a lightweight, portable, and user-adaptive mechanical structure, with 1 active degree of freedom (DOF) and 5 passive degrees of freedom for the elbow joint. Additionally, there is a VSA for actively adjusting elbow joint stiffness. As shown in Figure 1, the main structure of PVSED includes a rear frame, shoulder frame, and upper limb frame, each with an adjustable structure to accommodate different users’ specific body sizes. Furthermore, a main joint actuator system for elbow flexion and extension motion and a variable stiffness actuator system for stiffness adjustment are designed. The main actuation system for elbow extension motion is driven by a cable transmission mechanism connected to a DC motor (Maxon RE-30 brushed motor) mounted on the rear frame. In the independent stiffness actuator system, the VSA is implemented on the main unit. The VSA consists of a screw with a movable pivot driven by a compact DC motor (Maxon RE-13 brushed motor) fixed on the main unit, a pair of antagonistic springs, and an output link for interaction with the user. If there is a defect between the main unit and the output link, the user will feel the elasticity generated by the extension of one of the antagonistic springs, resulting in flexible interaction.
Figure 1 Mechanical design of PVSED: (a) Prototype of PVSED worn by the subject; (b) Adaptive design for individual body shapes of the subject. To achieve high adaptive independent stiffness adjustment for elbow joint motion assistance rehabilitation training, improvements were made based on previous work. The designed PVSED is a lightweight, portable, and user-adaptive mechanical structure, with 1 active degree of freedom (DOF) and 5 passive degrees of freedom for the elbow joint. Additionally, there is a VSA for actively adjusting elbow joint stiffness. As shown in Figure 1, the main structure of PVSED includes a rear frame, shoulder frame, and upper limb frame, each with an adjustable structure to accommodate different users’ specific body sizes. Furthermore, a main joint actuator system for elbow flexion and extension motion and a variable stiffness actuator system for stiffness adjustment are designed. The main actuation system for elbow extension motion is driven by a cable transmission mechanism connected to a DC motor (Maxon RE-30 brushed motor) mounted on the rear frame. In the independent stiffness actuator system, the VSA is implemented on the main unit. The VSA consists of a screw with a movable pivot driven by a compact DC motor (Maxon RE-13 brushed motor) fixed on the main unit, a pair of antagonistic springs, and an output link for interaction with the user. If there is a defect between the main unit and the output link, the user will feel the elasticity generated by the extension of one of the antagonistic springs, resulting in flexible interaction. 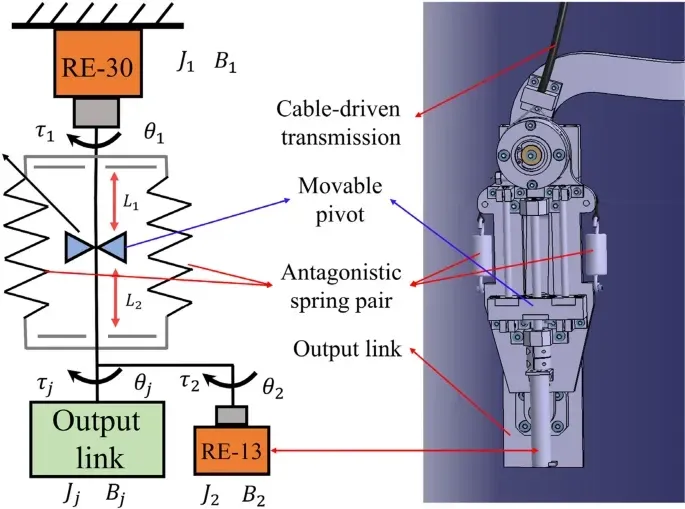 Figure 2 Composition and variable stiffness principle of PVSED As shown in Figure 2, the variable stiffness principle of PVSED can be described based on the definition of stiffness, defined as:
Figure 2 Composition and variable stiffness principle of PVSED As shown in Figure 2, the variable stiffness principle of PVSED can be described based on the definition of stiffness, defined as: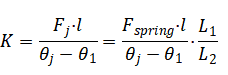 Where, is the interaction force acting on the output link, and is the spring force of the VSA. is the moment arm of PVSED, which is a constant. The turning angle can be calculated as .∕ represents the transmission ratio. To achieve adaptive variable stiffness modulation for different tasks, the RE-13 motor controls the position of the movable pivot by rotating the screw, actively adjusting the transmission ratio between the elastic element and the output link ∕. Therefore, by rotating the angle of the RE-13 motor, the movable pivot can be changed to the corresponding position to approach the desired transmission ratio ∕, thus achieving the required output stiffness of PVSED. As mentioned earlier, for ease of control practice, the stiffness control problem can be transferred to the RE-13 rotational control. In the experiment, the output link is fixed on a force sensor (MINI 4/20, BLAUTOTEC). By rotating the main unit of PVSED, the force at each position can be recorded. By substituting the measured and rotational angles, the output stiffness at each pivot position can be calculated using the formula.
Where, is the interaction force acting on the output link, and is the spring force of the VSA. is the moment arm of PVSED, which is a constant. The turning angle can be calculated as .∕ represents the transmission ratio. To achieve adaptive variable stiffness modulation for different tasks, the RE-13 motor controls the position of the movable pivot by rotating the screw, actively adjusting the transmission ratio between the elastic element and the output link ∕. Therefore, by rotating the angle of the RE-13 motor, the movable pivot can be changed to the corresponding position to approach the desired transmission ratio ∕, thus achieving the required output stiffness of PVSED. As mentioned earlier, for ease of control practice, the stiffness control problem can be transferred to the RE-13 rotational control. In the experiment, the output link is fixed on a force sensor (MINI 4/20, BLAUTOTEC). By rotating the main unit of PVSED, the force at each position can be recorded. By substituting the measured and rotational angles, the output stiffness at each pivot position can be calculated using the formula.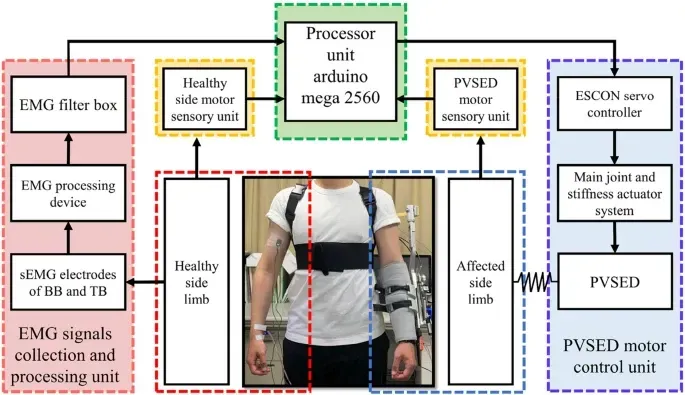 Figure 3 Configuration diagram of the control system In this paper, a comprehensive system configuration is designed to achieve trajectory tracking and independent stiffness modulation, including a processor unit, motion sensing unit for healthy side motion capture, PVSED motion sensing unit, EMG signal acquisition and processing unit, and PVSED motor control unit, as shown in Figure 3. An Arduino Mega 2560 is selected as the processor unit to communicate with various sensors and control the servo motor controller for motor trajectory tracking control, implementing the EMG-driven coordinated reference stiffness estimation model. For trajectory tracking control, an inertial measurement unit (GY-25 T tilt angle module) is placed on the healthy side limb to capture the reference trajectory for bilateral training tasks. Two additional units are connected to the output link of PVSED and the affected side limb to couple and collect actual positions, connected to the main frame of PVSED to calculate the defects of the VSA. Each inertial measurement unit communicates with the processor unit via the I2C method. In the PVSED motor control unit, two ESCON 50/5 servo controllers are used to drive the DC motor RE-30 of the main joint actuator system and the DC motor RE-13 of the variable stiffness actuator system through PWM commands from the processor unit.
Figure 3 Configuration diagram of the control system In this paper, a comprehensive system configuration is designed to achieve trajectory tracking and independent stiffness modulation, including a processor unit, motion sensing unit for healthy side motion capture, PVSED motion sensing unit, EMG signal acquisition and processing unit, and PVSED motor control unit, as shown in Figure 3. An Arduino Mega 2560 is selected as the processor unit to communicate with various sensors and control the servo motor controller for motor trajectory tracking control, implementing the EMG-driven coordinated reference stiffness estimation model. For trajectory tracking control, an inertial measurement unit (GY-25 T tilt angle module) is placed on the healthy side limb to capture the reference trajectory for bilateral training tasks. Two additional units are connected to the output link of PVSED and the affected side limb to couple and collect actual positions, connected to the main frame of PVSED to calculate the defects of the VSA. Each inertial measurement unit communicates with the processor unit via the I2C method. In the PVSED motor control unit, two ESCON 50/5 servo controllers are used to drive the DC motor RE-30 of the main joint actuator system and the DC motor RE-13 of the variable stiffness actuator system through PWM commands from the processor unit. 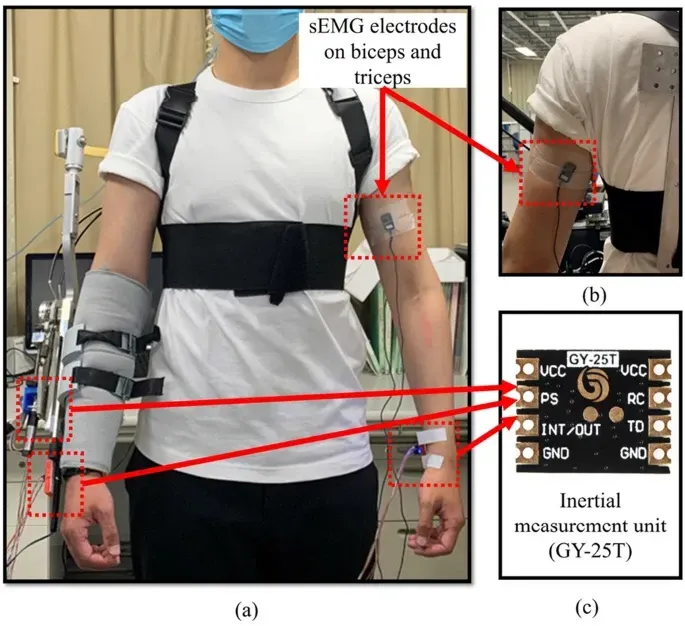 Figure 4 Experimental setup A bilateral impedance controller is cascaded with an inverse dynamics-based torque controller to achieve flexible assistive control of the human-robot coupling system, as shown in Figure 4. During the experimental phase, subjects were instructed to stand in front of a monitor, with the right side considered the affected side in this paper, thus wearing the PVSED on the right side. After cleaning the skin with alcohol to eliminate skin bioimpedance interference, two Ag/AgCl dry electrodes were connected to the biceps and triceps of the contralateral limb to collect raw EMG signals. In the experiment, subjects were asked to naturally complete bilateral curling motion tasks. At the same time, raw EMG signals from the healthy limb and motion information from both limbs were recorded for stiffness estimation and assistive interaction control.
Figure 4 Experimental setup A bilateral impedance controller is cascaded with an inverse dynamics-based torque controller to achieve flexible assistive control of the human-robot coupling system, as shown in Figure 4. During the experimental phase, subjects were instructed to stand in front of a monitor, with the right side considered the affected side in this paper, thus wearing the PVSED on the right side. After cleaning the skin with alcohol to eliminate skin bioimpedance interference, two Ag/AgCl dry electrodes were connected to the biceps and triceps of the contralateral limb to collect raw EMG signals. In the experiment, subjects were asked to naturally complete bilateral curling motion tasks. At the same time, raw EMG signals from the healthy limb and motion information from both limbs were recorded for stiffness estimation and assistive interaction control.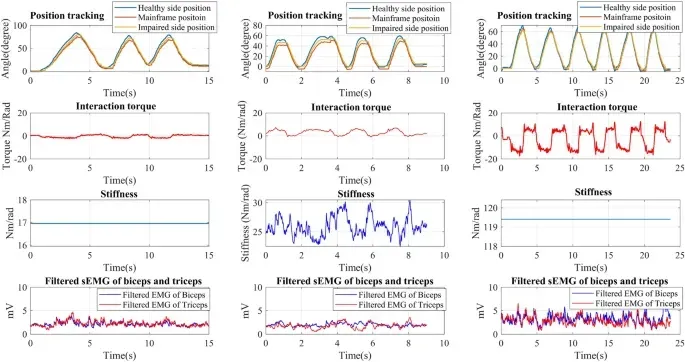 Figure 5 Comparison results of low stiffness condition, biomimetic variable stiffness condition, and high stiffness condition: (a) Low stiffness, no biomimetic variable stiffness; (b) Biomimetic variable stiffness; (c) High stiffness, no biomimetic variable stiffness. As shown in Figure 5, from low stiffness to high stiffness, the tracking error shows an increasing trend, which corresponds to the increasing trend of stiffness. This phenomenon is consistent with our previous research, as the torque generated for the same VSA deviation angle also increases with stiffness. Under biomimetic variable stiffness conditions, the output stiffness of PVSED can be calculated based on the EMG signals from the healthy side to influence the interaction torque, validating the feasibility of the proposed biomimetic stiffness modulation strategy.Conclusion: This paper proposes an EMG-driven biomimetic variable stiffness modulation strategy combined with a bilateral impedance control framework, aimed at promoting the relearning of bilateral motor skills in hemiplegic patients. Preliminary experiments evaluated the feasibility and performance of the proposed variable stiffness rehabilitation strategy. Results from different load experiments indicate that this strategy can transfer the extensive bilateral movement patterns and skills of the healthy side limb to the affected side limb under varying task intensities. The proposed biomimetic stiffness modulation strategy has the following advantages: 1) It introduces the concept of biomimetic variable stiffness adjustment for elbow joint rehabilitation of the upper limb, aimed at promoting coordination between limbs and the relearning of bilateral motor skills. It employs an EMG-based coordinated reference stiffness estimation model to explain bilateral motor skills through the synergistic effects of antagonistic muscles at the elbow joint. 2) Utilizing the proposed coordinated reference model, bilateral movement patterns and task skills can be quantitatively characterized by the EMG signals of specified antagonistic muscles at the joint. Comparison results under different loads indicate that under conditions of 0 kg, 1.5 kg, and 2.5 kg, the average stiffness values are 27.759 Nm/rad, 30.459 Nm/rad, and 32.981 Nm/rad respectively, allowing the side limb to perceive different levels of assistive compliance based on the required bilateral movement patterns. 3) Based on the proposed biomimetic variable stiffness modulation strategy, a bilateral impedance control framework based on the inverse dynamics of the human-robot coupling system is achieved, enabling reference trajectory tracking. By transferring the biomechanics of the healthy side limb for comparative results, as the stiffness and damping values increase from 0 kg to 2.5 kg (with an average stiffness of 27.759 Nm/rad at 0 kg, 30.459 Nm/rad at 1.5 kg, and 32.981 Nm/rad at 2.5 kg, with average damping values of 3.68 Nm∙s/rad, 3.85 Nm∙s/rad, and 3.95 Nm∙s/rad respectively), the average tracking error shows a decreasing trend (4.96°, 4.06°, 2.77°). Through the corresponding variable impedance characteristics, it is demonstrated that flexible interaction between the patient and the robot can be achieved.Full text link:https://rdcu.be/dgoZi
Figure 5 Comparison results of low stiffness condition, biomimetic variable stiffness condition, and high stiffness condition: (a) Low stiffness, no biomimetic variable stiffness; (b) Biomimetic variable stiffness; (c) High stiffness, no biomimetic variable stiffness. As shown in Figure 5, from low stiffness to high stiffness, the tracking error shows an increasing trend, which corresponds to the increasing trend of stiffness. This phenomenon is consistent with our previous research, as the torque generated for the same VSA deviation angle also increases with stiffness. Under biomimetic variable stiffness conditions, the output stiffness of PVSED can be calculated based on the EMG signals from the healthy side to influence the interaction torque, validating the feasibility of the proposed biomimetic stiffness modulation strategy.Conclusion: This paper proposes an EMG-driven biomimetic variable stiffness modulation strategy combined with a bilateral impedance control framework, aimed at promoting the relearning of bilateral motor skills in hemiplegic patients. Preliminary experiments evaluated the feasibility and performance of the proposed variable stiffness rehabilitation strategy. Results from different load experiments indicate that this strategy can transfer the extensive bilateral movement patterns and skills of the healthy side limb to the affected side limb under varying task intensities. The proposed biomimetic stiffness modulation strategy has the following advantages: 1) It introduces the concept of biomimetic variable stiffness adjustment for elbow joint rehabilitation of the upper limb, aimed at promoting coordination between limbs and the relearning of bilateral motor skills. It employs an EMG-based coordinated reference stiffness estimation model to explain bilateral motor skills through the synergistic effects of antagonistic muscles at the elbow joint. 2) Utilizing the proposed coordinated reference model, bilateral movement patterns and task skills can be quantitatively characterized by the EMG signals of specified antagonistic muscles at the joint. Comparison results under different loads indicate that under conditions of 0 kg, 1.5 kg, and 2.5 kg, the average stiffness values are 27.759 Nm/rad, 30.459 Nm/rad, and 32.981 Nm/rad respectively, allowing the side limb to perceive different levels of assistive compliance based on the required bilateral movement patterns. 3) Based on the proposed biomimetic variable stiffness modulation strategy, a bilateral impedance control framework based on the inverse dynamics of the human-robot coupling system is achieved, enabling reference trajectory tracking. By transferring the biomechanics of the healthy side limb for comparative results, as the stiffness and damping values increase from 0 kg to 2.5 kg (with an average stiffness of 27.759 Nm/rad at 0 kg, 30.459 Nm/rad at 1.5 kg, and 32.981 Nm/rad at 2.5 kg, with average damping values of 3.68 Nm∙s/rad, 3.85 Nm∙s/rad, and 3.95 Nm∙s/rad respectively), the average tracking error shows a decreasing trend (4.96°, 4.06°, 2.77°). Through the corresponding variable impedance characteristics, it is demonstrated that flexible interaction between the patient and the robot can be achieved.Full text link:https://rdcu.be/dgoZi