
Follow Us
 Reporter from “China Transportation Informatization” Hu Lihua A series of recent traffic accidents have brought the safety issues of autonomous driving to the forefront. In the current context where single-vehicle intelligence is difficult to break through, vehicle-road collaboration has become an important part of the commercialization of autonomous driving. From the technological research during the 10th and 11th Five-Year Plans, to the key technological breakthroughs during the 12th Five-Year Plan, to the transition from testing grounds to real roads by 2020, and now to the current wave of commercial application exploration, the curtain of rapid development in vehicle-road collaboration is gradually being drawn. What is the core essence of the new generation of vehicle-road collaboration? What challenges does vehicle-road collaboration face in its design and implementation? How should it be further promoted in the future? Experts at the 23rd China Expressway Informatization Conference, hosted by the China Highway Society and organized by “China Transportation Informatization” magazine, analyzed and discussed these issues.
Reporter from “China Transportation Informatization” Hu Lihua A series of recent traffic accidents have brought the safety issues of autonomous driving to the forefront. In the current context where single-vehicle intelligence is difficult to break through, vehicle-road collaboration has become an important part of the commercialization of autonomous driving. From the technological research during the 10th and 11th Five-Year Plans, to the key technological breakthroughs during the 12th Five-Year Plan, to the transition from testing grounds to real roads by 2020, and now to the current wave of commercial application exploration, the curtain of rapid development in vehicle-road collaboration is gradually being drawn. What is the core essence of the new generation of vehicle-road collaboration? What challenges does vehicle-road collaboration face in its design and implementation? How should it be further promoted in the future? Experts at the 23rd China Expressway Informatization Conference, hosted by the China Highway Society and organized by “China Transportation Informatization” magazine, analyzed and discussed these issues.
Cognition
The Core Essence of the New Generation of Vehicle-Road Collaboration For road engineers and traffic engineers, “vehicle-road collaboration” is not a new term. In the foundational courses of road engineering and traffic engineering, the coupling and collaboration of the four elements of the road traffic system: people, vehicles, roads, and environment are emphasized. However, with the progress of the times and the development of technology, “vehicle-road collaboration” has been endowed with many new connotations. In June 2021, Tsinghua University’s Intelligent Industry Research Institute and Baidu jointly released the world’s first white paper titled “Key Technologies and Prospects for Vehicle-Road Collaboration in Autonomous Driving.” The white paper points out that vehicle-road collaboration uses advanced wireless communication and new-generation internet technologies to implement dynamic real-time information exchange between vehicles, roads, and people in an all-encompassing manner. Based on the collection and integration of dynamic traffic information in all time and space, it conducts proactive safety control of vehicles and collaborative management of roads, fully realizing effective collaboration among people, vehicles, and roads, ensuring traffic safety, and improving traffic efficiency, thus forming a safe, efficient, and environmentally friendly road traffic system. Vehicle-road collaboration can accelerate the large-scale commercialization of autonomous driving, with enormous potential in the industrial chain, becoming a new high ground for technological innovation and industrial competition. The white paper states that vehicle-road collaborative autonomous driving is based on single-vehicle intelligent autonomous driving, utilizing advanced vehicle and road perception and positioning devices (such as cameras, radars, etc.) to achieve real-time high-precision perception and positioning of the road traffic environment. It exchanges data according to agreed protocols, achieving varying degrees of information exchange and sharing between vehicles, roads, and people (network interconnectivity), covering different levels of vehicle automation stages (vehicle automation), and considering the collaborative optimization issues between vehicles and roads (system integration). Through vehicle automation, network interconnectivity, and system integration, a vehicle-road collaborative autonomous driving system is ultimately constructed. Vehicle-road collaborative autonomous driving is a developmental process from low to high, mainly including three stages: information exchange collaboration stage, collaborative perception stage, and collaborative decision-making control stage. Currently, driven by both technology and policy, vehicle-road collaboration is entering a new development stage, making the correct understanding of vehicle-road collaboration extremely important. In this forum, experts expressed their views on this. Zhang Jie, Deputy General Manager and Chief Technology Officer of Datang Gaohong Intelligent Transportation Division, believes that vehicle-road collaboration is not a new term. The main differences from traditional highway informatization lie in four aspects: From the perspective of information flow, traditional highway informatization emphasizes bottom-up information flow, focusing on information collection, visualization, and big data statistics, while vehicle-road collaboration emphasizes a closed-loop information flow with control significance; From the service subject perspective, traditional highway informatization mainly serves managers, focusing on “operation management,” while vehicle-road collaboration serves both managers and drivers, emphasizing “operation management, construction, maintenance, and service”; From the perspective of information analysis, traditional highway informatization emphasizes data aggregation and macro information analysis, but does not sufficiently obtain and analyze micro information, while vehicle-road collaboration can achieve a combination of macro scheduling and micro control; From the perspective of information flow timeliness, traditional highway informatization has low requirements for information flow timeliness, but vehicle-road collaboration, especially when serving L4-level and above autonomous driving, has extremely high requirements for information flow timeliness. In summary, the development from traffic informatization to vehicle-road collaboration is a process of evolving from a traditional traffic intelligent brain to a “smart brain + neural network.” Additionally, Zhang Jie believes that vehicle-road collaboration mainly involves four key technologies: roadside full-domain perception technology, high-precision vehicle positioning technology, high-reliability vehicle-to-vehicle communication technology, and hierarchical cloud control technology. Wang Weifeng, Director of the Intelligent Transportation Technology and Equipment R&D Center of Huashe Design Group, believes that vehicle-road collaboration is not a narrow concept; it is not just control but can also be a service. The core essence of the new generation of vehicle-road collaboration should include intelligent vehicles, responsive roads, interactive networks, and decision-making brains. Intelligent vehicles are those that can see clearly, hear well, learn, and think, capable of perceiving the surrounding environment, understanding electronic maps, listening to each other, and co-governing, as well as self-learning and making autonomous decisions. Responsive roads are no longer cold but are perceivable, activated living entities, capable of self-perception of infrastructure, perception of people, vehicles, and the environment, thus constructing an “I2X” (interaction, collaboration) from the perspective of the road. Overall, Wang Weifeng believes that, essentially, vehicle-road collaboration requires the integration of technologies with brain-like capabilities such as perception, thinking, understanding, analysis, and execution; from the perspective of elements, it requires credible interaction and collaboration among all elements including people, vehicles, environment, and infrastructure; and from the perspective of goals, it aims for safety, efficiency, convenience, and greenness, achieving a balance between service and management.
Design
Multiple Key Links Still Need to Overcome Challenges Since its inception, the technology of vehicle-road collaboration has rapidly developed and iterated. From the broadest variable speed limit systems and traffic information release systems for ordinary vehicles, to fog road driving safety induction devices, luminous induction facilities, and microwave vehicle detection-based visual blind spot hazard warning systems for ordinary vehicles, and further developing into active luminous traffic signs based on ETC and IoT technology, and visual blind spot hazard warning systems based on millimeter-wave radar or machine vision, with the development of C-V2X technology, intelligent vehicle-road collaborative systems based on LTE-V2X and 5G-V2X have emerged. The rapid technological updates have made the choice of technological routes in design complex, requiring the combination of multiple technological routes to better support the realization of different scene functions. Chen Zhihong, Director of the Technology and Network Security Department of the Road Network Monitoring and Emergency Response Center of the Ministry of Transport, believes that the current design process of vehicle-road collaboration involves multiple aspects such as communication technology, application scenarios, data fusion, effect quantification indicators, safety, and product performance indicators, but there are also various challenges. In terms of V2X communication technology, Chen Zhihong believes that the mainstream technologies currently used for V2X communication include Dedicated Short Range Communication (DSRC) technology and Cellular Vehicle-to-Everything (C-V2X) technology based on cellular mobile communication systems (including LTE-V2X and 5G NR-V2X). ETC is the only electronic tag for vehicles, and except for vehicle-to-vehicle (V2V) communication that cannot be realized, almost all V2I scenarios can be implemented with the existing ETC system after certain software upgrades; LTE-V2X can support all functions of assisted driving and primary autonomous driving, and the LTE-V2X industrial ecosystem is currently basically mature; the 5G-based V2X technology is still in the development stage, with R16 laying a good foundation for C-V2X, enabling 5G technology to better support autonomous driving and digital infrastructure. Therefore, in the design process, it is necessary to reasonably select communication technologies based on different needs and prepare for a smooth transition for future development. In terms of application scenarios, Chen Zhihong believes that they currently present a diversified and continuously enriching characteristic, thus posing higher requirements for design. In September 2017, China’s V2X application layer standard “Cooperative Intelligent Transportation Systems – Vehicle Communication System Application Layer and Application Layer Data Interaction Standard” defined 17 typical vehicle-road collaboration application scenarios. In 2020, the “Cooperative Intelligent Transportation Systems – Vehicle Communication System Application Layer and Application Data Interaction Standard Phase II” defined 12 application scenarios for the second phase, further enriching the V2X application scenarios and providing a foundation for safer, smarter, and more collaborative scenario realization. Currently, the most common application scenarios in vehicle-road collaboration construction include near-all-weather passage, ramp merging and diverging, tunnel induction and driving systems, and lane-level differentiated services. Specifically, near-all-weather passage refers to the use of traffic information monitoring, vehicle-road collaboration, edge computing, and other technologies and control methods to achieve safe passage of vehicles under specific adverse weather conditions through vehicle-road collaboration warnings and induction services; ramp merging and diverging refers to warning reminders for vehicles passing through merging and diverging areas to avoid collisions between mainline vehicles and ramp vehicles; tunnel induction and driving systems refer to the entire process of safety warnings and induction scenarios for vehicles before, during, and after passing through tunnels, focusing on solving the black-and-white hole effect in tunnels while achieving early notification of accidents inside the tunnel; lane-level differentiated services refer to the construction of lane-level differentiated service systems to provide differentiated and precise planning and induction services for special vehicles based on the driving characteristics of different user subjects on highways and the differences in their functional needs for road use. The first two are relatively basic application scenarios in vehicle-road collaboration, while the latter two meet higher demand application scenarios. Different application scenarios for highways and urban roads propose different deployment principles and requirements, and specific roadside facility deployment plans need to be set according to road conditions and the precision requirements of monitoring objects to meet actual business needs. For example, for lane-level differentiated services with higher precision requirements, the effective coverage range of cameras is approximately 100 meters for lane-level tracking, while if only simple event detection is required, the effective coverage range of cameras can reach 500-1000 meters. It is evident that different precision requirements directly affect the selection and deployment principles of equipment, directly impacting the scale and cost of the project. In addition to the aforementioned two aspects of communication technology and application scenarios, Chen Zhihong believes that there are also certain challenges in traffic big data fusion. Currently, highway business data can be roughly divided into several categories: toll data, traffic monitoring data, traffic meteorological data, command and dispatch data, and daily operation and maintenance data, etc. These data have characteristics such as large volume, high dimensionality, multi-source, heterogeneous, dynamic, timely, continuous, and infinite. With the continuous construction of intelligent transportation information systems, the relevant data volume has jumped from the TB level to the PB level, forming a true big data environment for highway traffic operations. However, there are still issues such as insufficient solid data resource foundations, the need for deeper promotion of data sharing and openness, insufficient widespread application of big data, and the need for improvement in management systems, which urgently need to be further advanced to promote data fusion and better support the construction of vehicle-road collaboration systems. Additionally, in terms of effect indicator quantification, the current design of vehicle-road collaboration still lacks clear quantifiable indicators, making it difficult to quantify effects such as improvements in traffic efficiency and reductions in accident rates; in terms of safety, since vehicle-road collaboration is closely linked with smart highways and traditional electromechanical systems, higher requirements are placed on network security solutions; in terms of product performance indicators, the diversity of product types leads to diverse design solutions, and the selection of equipment types and parameters is closely related to actual scene needs, with many product parameters still lacking unified design standards. It is evident that in the design process of vehicle-road collaboration, further improvements and developments are needed in multiple aspects such as communication technology, application scenarios, big data fusion, and effect indicator quantification.
Implementation
Typical Samples of Pilot Testing The ideal scenario for vehicle-road collaboration is the deep integration and mutual empowerment between “vehicle-road-cloud-network-map” from technology to products, and then to application scenarios. The most critical first step is to move application scenarios from closed to open, as well as the industrial collaboration between the vehicle and road sectors, which were originally parallel tracks. In recent years, local governments have actively introduced relevant policies to strive for national-level vehicle networking pilot zones, resulting in a number of key cities for vehicle networking industry development, such as Wuxi, Tianjin, Chongqing, Changsha, Deqing, and Guangzhou, leading the industry development. Currently, China has established several national-level testing demonstration zones and approved national-level vehicle networking pilot zones in Jiangsu (Wuxi), Tianjin (Xiqing), and Hunan (Changsha). At present, the construction of vehicle networking in the country is gradually transitioning from small-scale testing demonstrations to large-scale pilot applications, and various demonstration zones are accelerating the deployment of C-V2X network environments. In addition to the demonstration projects of vehicle networking, various provinces and cities are also considering vehicle-road collaboration in the construction of smart highways. Currently, provinces such as Beijing, Hebei, Jiangsu, Zhejiang, Jiangxi, Guangdong, Hunan, and Hainan are exploring the application of vehicle-road collaboration in smart highways, which has greatly accelerated the verification of vehicle-road collaboration experiences. At this forum, experts introduced typical vehicle-road collaboration construction projects. Zhang Yan, Deputy Chief Engineer of Zhongzitai Ke Traffic Engineering Group Co., Ltd., took the Beijing-Shanghai Expressway as an example to introduce the application of vehicle-road collaboration in smart highways. The Beijing-Shanghai Expressway (G2 section) is a project for constructing a vehicle networking pilot application environment and scenario testing verification platform, located in the strategic development economic belts of Beijing-Tianjin-Hebei and the Yangtze River Delta, characterized by strong demonstration significance, high traffic volume, good basic conditions, and diverse application scenarios, expected to be completed in July 2022. Zhang Yan pointed out that the construction principles of the Beijing-Shanghai Expressway focus on innovation-driven, demand-oriented, people-centered, demonstration-first, and integration of old and new. In terms of technological routes, this project primarily achieves road testing environment perception through the fusion of “high-definition cameras + millimeter-wave radar”; it uses “C-V2X” communication technology to achieve real-time communication between “vehicle-road” and “vehicle-cloud” (this stage uses “LTE-V2X” communication technology, supporting a smooth transition to 5G-V2X in the future); it follows the collaborative strategy of “real-time delivery of road testing information (PCS) and timely issuance of cloud information (Uu)”; and it realizes vehicle-road collaboration applications in typical scenarios on highways and urban roads. In terms of construction content, it builds a large-scale vehicle networking pilot application environment based on C-V2X, achieving collaboration among “people, vehicles, roads, and clouds” through large-scale vehicle modifications, comprehensive roadside deployment, and integrated cloud services, realizing cross-province applications of vehicle-road collaboration on the Beijing-Shanghai Expressway (G2 section). Specifically, in the cloud, it mainly consists of three layers: business application layer, platform service layer, and infrastructure layer. The cloud construction architecture is shown in the following figure.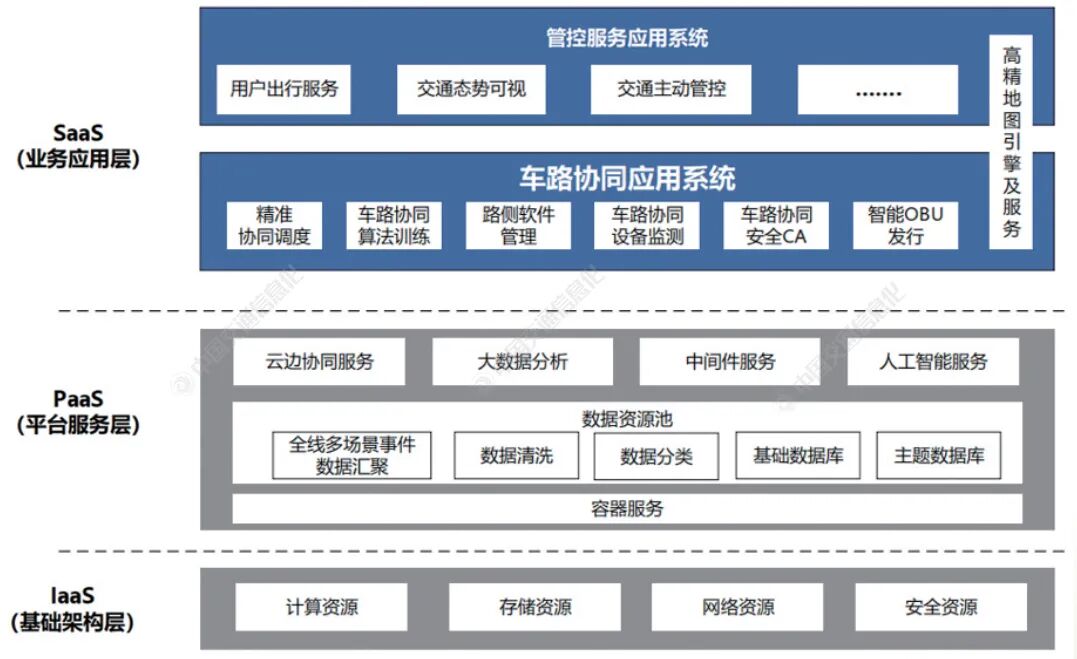 Cloud Construction Architecture DiagramOn the roadside, it mainly realizes four major application scenarios: safety warnings and induction for merging and diverging, safety warnings and induction for tunnels, near-all-weather auxiliary passage, and lane-level differentiated services. The deployment points for safety warnings and induction for merging and diverging are at interchange ramps, hub interchanges, service areas, etc., selecting sections with high traffic volume, high accident rates, and high proportions of trucks for deployment in merging and diverging scenarios. The deployment points for safety warnings and induction for tunnels are in tunnel areas, selecting typical tunnels with high traffic volume, high accident rates, and significant black-and-white hole effects for deployment. The deployment points for near-all-weather auxiliary passage are on pilot sections such as Jing-Jin-Tang, Linyi to Laiwu, Xinyi to Jiangdu, and Jing-Tai Expressway, selecting sections that play important roles in resident or logistics transport, with low substitutability, based on the functions and importance of the sections, while also considering traffic accident rates, causes of traffic accidents, traffic volume, and traffic characteristics. For example, sections connecting main urban areas with satellite cities, sections connecting urban areas with airports, sections connecting counties, and sections passing through logistics distribution areas. The deployment points for lane-level differentiated services are on the near-all-weather auxiliary passage sections from Xinyi to Jiangdu in Jiangsu, providing lane-level driving induction services for special vehicles based on the infrastructure of near-all-weather auxiliary passage, combined with high-precision maps and vehicle terminal functions. In terms of differentiated induction services for key vehicles, application scenarios include path guidance for freight logistics vehicles, speed guidance for freight logistics vehicles, location monitoring for freight logistics vehicles, path guidance for passenger and dangerous goods vehicles, speed guidance for passenger and dangerous goods vehicles, location monitoring for passenger and dangerous goods vehicles, avoidance of dangerous vehicles, and emergency lane driving induction for rescue vehicles. On the vehicle side, it includes communication modules (Uu, PC5, 4G), V2X application modules, ETC application modules, satellite positioning modules, MCU real-time processing modules, warning modules (audio and visual warnings), WIFI & BT modules, and hardware encryption modules. In summary, the current application examples of vehicle-road collaboration in smart highways are increasing, such as the Jing-Tai Expressway with a one-way 20KM vehicle-road collaboration demonstration section, Chengyi Expressway built based on LTE-V2X technology for vehicle networking, Wufengshan Cross-River Highway connection built as a vehicle-road collaboration demonstration application base and the first highway with full coverage of 5G networks + applications, and the Huhangyu Expressway achieving technologies for unmanned driving and freight vehicle platooning, etc.
Cloud Construction Architecture DiagramOn the roadside, it mainly realizes four major application scenarios: safety warnings and induction for merging and diverging, safety warnings and induction for tunnels, near-all-weather auxiliary passage, and lane-level differentiated services. The deployment points for safety warnings and induction for merging and diverging are at interchange ramps, hub interchanges, service areas, etc., selecting sections with high traffic volume, high accident rates, and high proportions of trucks for deployment in merging and diverging scenarios. The deployment points for safety warnings and induction for tunnels are in tunnel areas, selecting typical tunnels with high traffic volume, high accident rates, and significant black-and-white hole effects for deployment. The deployment points for near-all-weather auxiliary passage are on pilot sections such as Jing-Jin-Tang, Linyi to Laiwu, Xinyi to Jiangdu, and Jing-Tai Expressway, selecting sections that play important roles in resident or logistics transport, with low substitutability, based on the functions and importance of the sections, while also considering traffic accident rates, causes of traffic accidents, traffic volume, and traffic characteristics. For example, sections connecting main urban areas with satellite cities, sections connecting urban areas with airports, sections connecting counties, and sections passing through logistics distribution areas. The deployment points for lane-level differentiated services are on the near-all-weather auxiliary passage sections from Xinyi to Jiangdu in Jiangsu, providing lane-level driving induction services for special vehicles based on the infrastructure of near-all-weather auxiliary passage, combined with high-precision maps and vehicle terminal functions. In terms of differentiated induction services for key vehicles, application scenarios include path guidance for freight logistics vehicles, speed guidance for freight logistics vehicles, location monitoring for freight logistics vehicles, path guidance for passenger and dangerous goods vehicles, speed guidance for passenger and dangerous goods vehicles, location monitoring for passenger and dangerous goods vehicles, avoidance of dangerous vehicles, and emergency lane driving induction for rescue vehicles. On the vehicle side, it includes communication modules (Uu, PC5, 4G), V2X application modules, ETC application modules, satellite positioning modules, MCU real-time processing modules, warning modules (audio and visual warnings), WIFI & BT modules, and hardware encryption modules. In summary, the current application examples of vehicle-road collaboration in smart highways are increasing, such as the Jing-Tai Expressway with a one-way 20KM vehicle-road collaboration demonstration section, Chengyi Expressway built based on LTE-V2X technology for vehicle networking, Wufengshan Cross-River Highway connection built as a vehicle-road collaboration demonstration application base and the first highway with full coverage of 5G networks + applications, and the Huhangyu Expressway achieving technologies for unmanned driving and freight vehicle platooning, etc.
Future
Key Steps for Large-Scale Application Vehicle-road collaboration is a “system engineering” that spans multiple departments and industries, integrating technology, industry, policy and regulations, infrastructure construction, and business models. In fact, due to issues such as cost, policy, and regulations, vehicle-road collaboration technology has not yet been widely implemented and applied. The large-scale implementation of vehicle-road collaboration still requires a process. Regarding the future development of vehicle-road collaboration, Zhang Yan believes that further improvements and explorations are needed in various aspects such as business collaboration, legal regulations, and operational models. Zhang Yan identifies nine issues currently facing vehicle-road collaboration: 1. Unclear vehicle-road collaboration business on the cloud platform. The outdoor business scenarios of vehicle-road collaboration are relatively clear, but the business scenarios on the platform side are not clear. Currently, the platform businesses in the vehicle-road collaboration demonstration zones in China’s highways are mostly focused on effect display, with insufficient exploration of core application businesses related to vehicle-road collaboration, lacking strong correlation with vehicle-road collaboration business applications. 2. Fragmentation with existing highway toll, monitoring, and maintenance system businesses. Currently, the vehicle-road collaboration business is fragmented from traditional highway toll systems, monitoring systems, and maintenance systems. How to better connect these businesses, enhance data value and business value, and achieve an effect of 1+1+1+1>4 is a direction that needs to be explored in the future. 3. Interoperability issues between platforms of various demonstration projects. Currently, multiple provinces and cities in China have launched vehicle-road collaboration demonstration application projects, and each province and city, even each road section, has built its own vehicle-road collaboration testing and verification platform, with varying construction standards, leading to independence and fragmentation between platforms. 4. Unclear communication performance requirements for vehicle-road collaboration businesses on highways. Network demands are unclear, and the basis for network design is insufficient; network construction is often siloed, lacking unified planning; network solutions vary, and there is a lack of evaluation and testing standards for networks. 5. Variability in product performance of roadside equipment, lacking unified deployment principles. Currently, roadside perception devices (high-definition cameras, millimeter-wave radars, laser radars, meteorological perception devices), roadside computing devices (MEC), roadside communication devices (RSU), etc., have a wide variety of products with significant differences in performance indicators, and deployment spacing is constrained by the capabilities of the products themselves. 6. Tunnel positioning issues are still being explored. The current inability to achieve precise positioning within tunnels remains to be explored, and issues such as rapid positioning of accident locations and types within tunnels, as well as blind spots at tunnel entrances and exits, still need further promotion. 7. Unclear service interface between single-vehicle intelligence and vehicle-road collaboration. In terms of improving road traffic efficiency and safety performance, what issues cannot be solved by single-vehicle intelligence? What specific information needs to be provided by the road side, and how can this information be effectively verified? Currently, there is no relatively clear content on this. 8. The operational, management, and service mechanisms for vehicle-road collaboration have not yet been established. For road owners and highway operating companies, vehicle-road collaboration is still in the early construction stage nationwide and has not yet truly entered the operational and management stage. The existing operational and management mechanisms may not support the operational and management businesses of vehicle-road collaboration. 9. Unclear profit models for vehicle-road collaboration. Vehicle-road collaboration is being vigorously constructed nationwide, but the overall cost of vehicle-road collaboration systems is high, equipment installation is dense, technical requirements are high, and the penetration rate of connected vehicles is low. The profit model is still being explored, and most projects are being constructed as pilots, with large-scale promotion still facing challenges. In light of the various issues facing vehicle-road collaboration, including industry collaboration, legal regulations, operational models, and standard guarantees, Liu Jiling, Secretary of the Party Committee and General Manager of the Chongqing Regional Management Headquarters of China Communications Asset Management Co., Ltd., proposed three suggestions: First, accelerate the formulation of standards and norms. Fully utilize the advantages of projects in the construction, testing, and operation of vehicle-road collaboration, leverage the role and value of demonstration roads, and promote the formulation, improvement, and application of relevant standards and norms under the leadership of relevant industry departments. Second, accelerate the exploration of business models. Currently, vehicle-road collaboration has not formed a network scale and user scale, nor a circular business model, and there are still significant obstacles to commercial promotion. Currently, providing vehicle-road collaboration solutions, offering intelligent device integration services, conducting vehicle-road collaboration project consulting, and providing commercial testing services for intelligent devices are four directions with commercial potential. Third, actively seek government support. In terms of research support, make good use of demonstration project resources, actively seek research and funding support from regions with policy advantages, and promote more vehicle-road collaboration projects to be implemented; in terms of testing support, actively seek testing support, deploying onboard terminals in vehicles frequently traveling on roads to increase the testing range, and enhance and improve the vehicle-road collaboration system. Regarding future strategies for promoting vehicle-road collaboration, Li Baidan, a senior engineer at the Planning Research Institute of the Ministry of Transport, believes that four aspects need to be focused on: first, emphasize integrated innovation, focusing on pain points and user experiences in smart highways and vehicle-road collaboration, and innovatively design application scenarios and functions; improve operational mechanisms and sustainable business models, allowing “roads” to form a closed loop of investment, operation, construction, and reinvestment, and promote the construction of standards and norms to ensure that smart highways and vehicle-road collaboration can operate effectively and be scalable. Second, enhance rational thinking and remain calm; in the case where the construction models and application scenarios of smart highways and vehicle-road collaboration are not very clear, avoid blindly pursuing high-end solutions for the sake of construction. Third, ensure orderly development through top-level design, focusing on achieving large-scale, systematic, and networked applications of mature technologies in smart highways and vehicle-road systems in the short term, and planning for key technology research and pilot demonstrations in the long term, continuously covering new applications at a certain scale, focusing on expanding network effects, and more importantly, ensuring that everyone has a sense of experience and gain. Finally, manage the relationships between government and market, innovation and safety, and data openness and security.
Conclusion
In the post-pandemic era, the wave of “new infrastructure” is coming, with a dense outbreak of domestic intelligent connected demonstration zones and continuous advancement of various road and vehicle testing work, an unstoppable technological revolution in the transportation field is underway, and vehicle-road collaboration is also ushering in a historic development opportunity. With the support of policies, technological innovations, and industrial integration… vehicle-road collaboration has reached a new critical juncture, and we look forward to a future where beautiful travel is no longer far away. (Original article published in the 9th issue of “China Transportation Informatization” in 2021)WeChat Editor | Hu LihuaEditor | Hu Lihua

