Document Number:No.367(AS-035)
Source:
Mohammed Jamal Almansor, Norashidah Md Din, Mohd Zafri Baharuddin, Ahmed Jasim Al-asadi, Huda Mohammed Alsayednoor, Zeyad Ghaleb Al-Mekhlafi, Badiea Abdulkarem Mohammed, Majid Khalaf Alshammari. A conceptual framework for smart ports: Novel UAV-based pilotage protocol using flying aerial ad-hoc networks. Alexandria Engineering Journal, Volume 123, 2025. https://doi.org/10.1016/j.aej.2025.01.068.
Institution:
National Power University of Malaysia, etc.
Abstract:
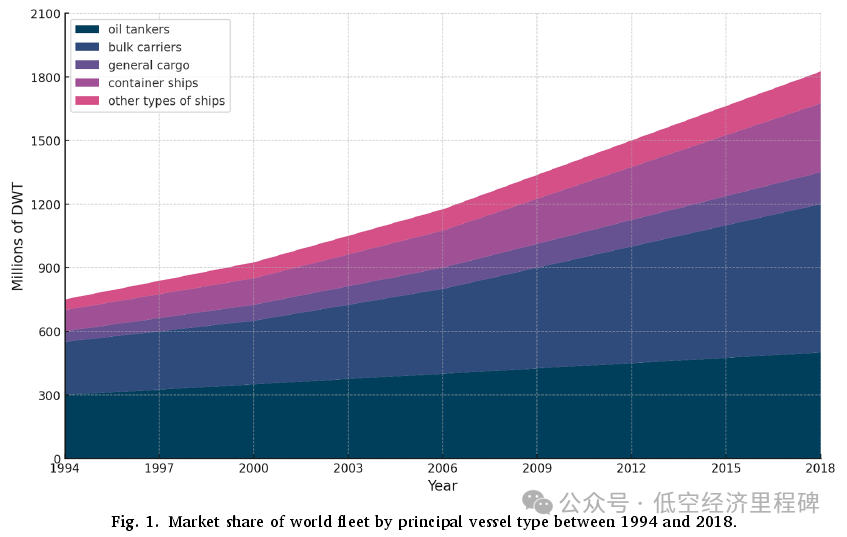
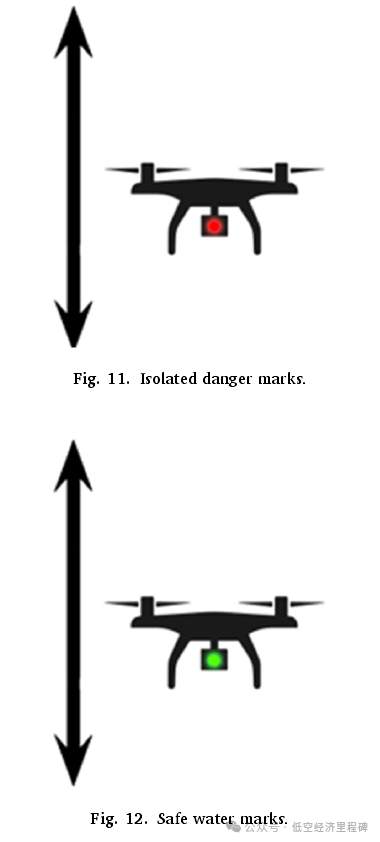
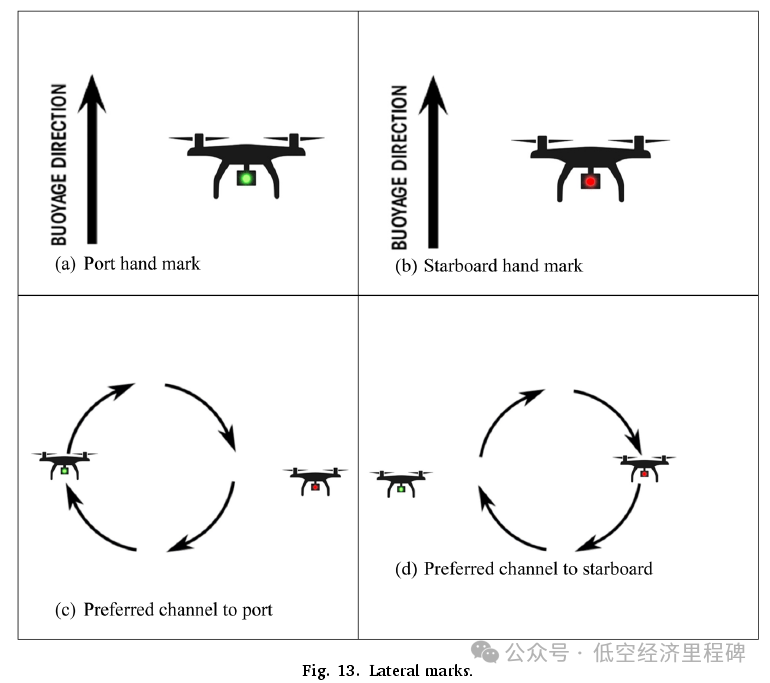
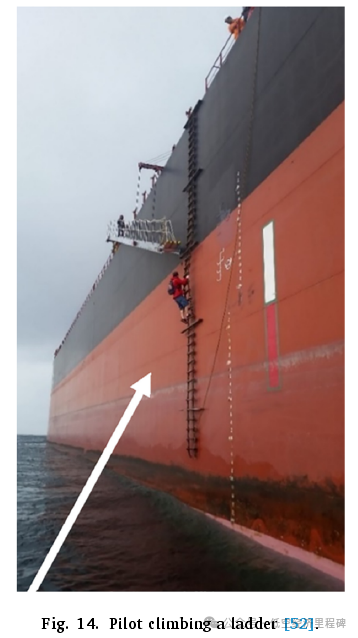
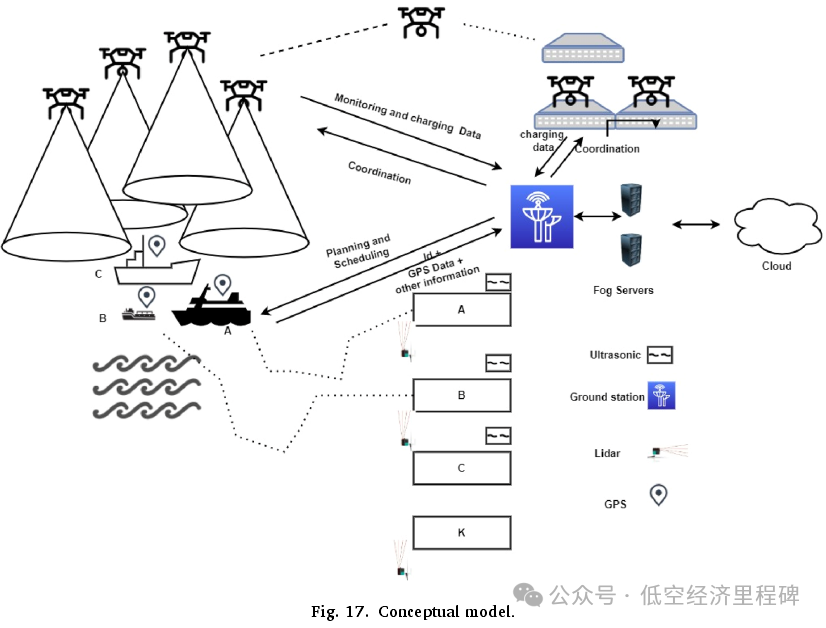
With the increase in container volumes and the size of vessels, the complexity of port operations has grown, making efficiency a critical priority. Traditional vessel navigation in the dock area relies on pre-installed buoy systems with geometric colored markers, which are costly and safety-critical, posing significant risks to pilots. This paper proposes a novel approach that incorporates a ship pilotage protocol based on Flying Aerial Ad-Hoc Networks (FANET) as part of the smart port concept. This innovative system replaces the IALA buoy system with drone-guided vessel navigation, utilizing advanced sensing and communication infrastructure to achieve precise docking operations. Additionally, it integrates a coordinated drone charging process to maintain operational continuity. This work addresses a significant gap in existing FANET routing protocols, which often overlook the integration of drone routing and mobility models tailored for specific piloting tasks, such as charging coordination. By employing Reinforcement Learning (RL) techniques, the proposed method aims to optimize vessel guidance, planning, and scheduling, providing an intelligent port system capable of determining optimal trajectories. This novel approach not only enhances operational efficiency but also lays the groundwork for modernizing maritime navigation and port management through cutting-edge drone technology.
Figures:

Conclusion:
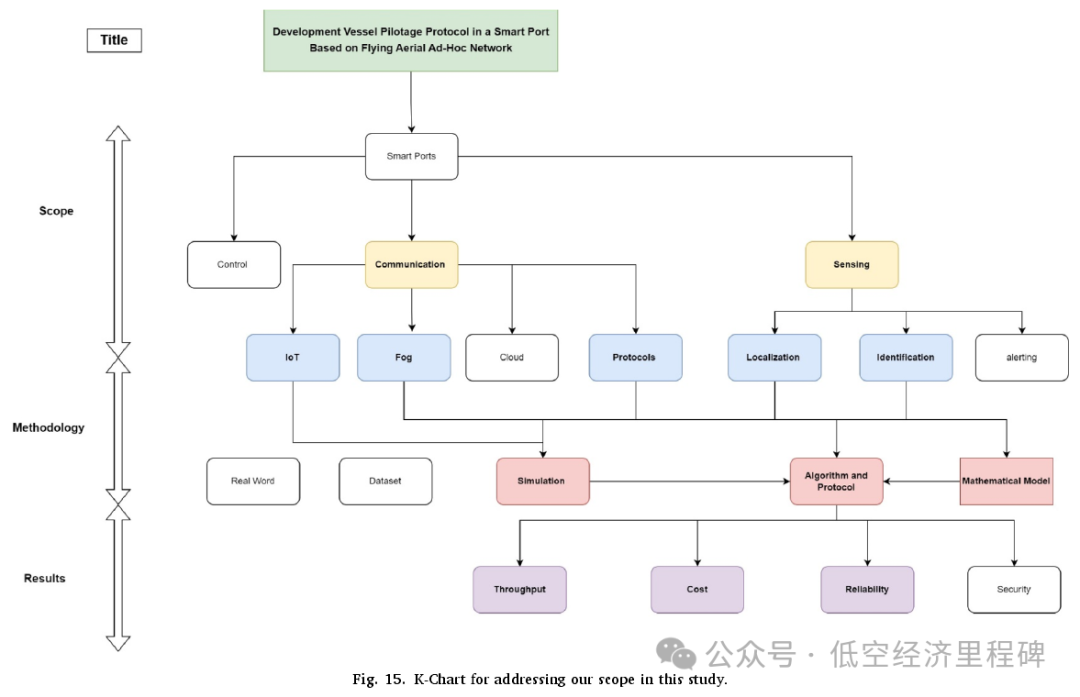
This study presents a new method for developing ship pilotage protocols in smart ports, utilizing Flying Aerial Ad-Hoc Networks (FANET) as an alternative to traditional IALA buoy systems. Through an extensive literature review and bibliometric analysis, two significant gaps were identified: existing FANET routing algorithms primarily focus on drone-to-drone communication without aligning routing with mobility models tailored for dynamic drone movements in piloting applications, and most current protocols are designed for general tasks, neglecting specific tasks related to piloting, such as drone charging coordination. To address these gaps, this study proposes a comprehensive framework that includes sensing and communication infrastructure for vessel identification, positioning, planning, and scheduling during docking operations; a drone-guided dedicated protocol to ensure efficient and precise navigation; and a drone coordination mechanism to optimize task lifespan and minimize the number of active drones. While the proposed system is conceptually robust, future work will involve rigorous evaluation through simulations and real-world testing to validate its effectiveness under practical conditions. By integrating cutting-edge technology, this research sets new benchmarks for safety, efficiency, and sustainability in maritime navigation, contributing to the development of intelligent and adaptive smart port systems.