Buses, buses, they always get you tangled up. In this world, signals may be the same, but there are thousands of buses, which can be quite a headache.
In general, there are three types of buses: internal buses, system buses, and external buses. Internal buses are used for interconnections between peripheral chips and processors within a microcomputer; system buses are for interconnections between plug-in boards and the system board; external buses are for communication between the microcomputer and external devices, allowing the microcomputer to exchange information and data with other devices, facilitating device-level interconnections.
In addition to buses, there are also some interfaces that are a collection of various buses, or can be described as accommodating all.
SPI (Serial Peripheral Interface): A synchronous serial bus method proposed by MOTOROLA. It is a high-speed synchronous serial port with 3 to 4 lines, allowing independent and synchronous transmission and reception.
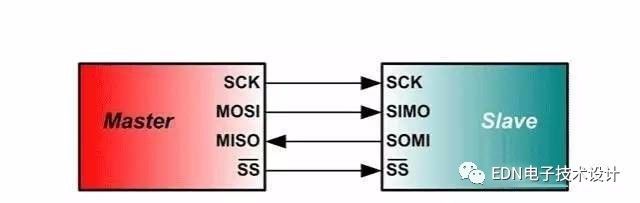
Due to its powerful hardware capabilities, it is widely used in smart instruments and measurement and control systems composed of microcontrollers. If speed is not a critical requirement, using the SPI bus mode is a good choice. It can save I/O ports, increase the number of peripherals, and enhance system performance. The standard SPI bus consists of four lines: Serial Clock Line (SCK), Master Input/Slave Output Line (MISO), Master Output/Slave Input Line (MOSI), and Chip Select Signal (CS). Some SPI interface chips may include an interrupt signal line or may not have MOSI.
The SPI bus consists of three signal lines: Serial Clock (SCLK), Serial Data Output (SDO), and Serial Data Input (SDI). The SPI bus can connect multiple SPI devices. The SPI device providing the serial clock is the SPI master, while other devices are SPI slaves. Full-duplex communication can be achieved between master and slave devices, and when there are multiple slave devices, an additional slave select line can be added. If simulating the SPI bus with general I/O ports, one output port (SDO), one input port (SDI), and another port depending on the type of device being implemented are required. If implementing master-slave devices, both input and output ports are needed; if only a master device is implemented, only an output port is required; if only a slave device is implemented, only an input port is needed.
I2C (Inter-Integrated Circuit): A two-wire serial bus developed by PHILIPS for connecting microcontrollers and their peripheral devices.
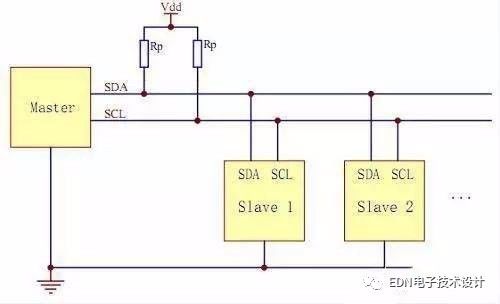
The I2C bus transmits information between the bus and devices using two lines (SDA and SCL), enabling serial communication between microcontrollers and external devices or bidirectional data transfer between master and slave devices. I2C is an open-drain output, and most I2C implementations are two-wire (clock and data), typically used for transmitting control signals.
I2C is a multi-master bus, allowing any device to function as a master and control the bus. Each device on the bus has a unique address, and depending on their capabilities, they can operate as transmitters or receivers. Multiple microcontrollers can coexist on the same I2C bus.
UART: Universal Asynchronous Receiver-Transmitter, which completes bidirectional communication at standard baud rates, but at slower speeds.
The UART bus is asynchronous, making its structure generally more complex than the previous two synchronous serial ports. It typically consists of a baud rate generator (which generates a baud rate equal to 16 times the transmission baud rate), a UART receiver, and a UART transmitter, with two lines for sending and receiving data.
UART is a chip used for controlling communication between computers and serial devices. It is important to note that it provides an RS-232C data terminal equipment interface, allowing computers to communicate with modems or other serial devices using the RS-232C interface. As part of the interface, UART also provides the following functions:
Converts parallel data received from the computer into an output serial data stream. Converts serial data from external sources into bytes for use by devices that require parallel data within the computer. Adds parity bits to the output serial data stream and performs parity checking on the data stream received from external sources. Adds start and stop markers to the output data stream and removes them from the received data stream. Handles interrupt signals generated by keyboards or mice (which are also serial devices). Manages synchronization issues between the computer and external serial devices. Some higher-end UARTs also provide input/output data buffers; the latest UART is the 16550, which can store 16 bytes of data in its buffer before the computer needs to process it, while the typical UART is the 8250. Nowadays, if you purchase an internal modem, it usually contains a 16550 UART.
Comparison of SPI, I2C, and UART
Both SPI and I2C are communication methods for short distances, typically between chips or between other components like sensors and chips. SPI and I2C are used for on-board communication; I2C can sometimes be used for inter-board communication, but only over very short distances. For example, some touch screens and mobile LCD screens often use I2C. I2C can replace standard parallel buses and connect various integrated circuits and functional modules. I2C is a multi-master bus, allowing any device to function as a master and control the bus. Each device on the bus has a unique address, and depending on their capabilities, they can operate as transmitters or receivers. Multiple microcontrollers can coexist on the same I2C bus, and both lines are low-speed transmission.
On the other hand, UART is used for communication between two devices, such as a device built with a microcontroller and a computer. This type of communication can be done over long distances. UART is faster than the previous two, reaching speeds of up to around 100K, used for communication between computers and devices or between computers, but its effective range is not very long, about 10 meters. The advantages of UART include broad support and a simple program design structure. With the development of USB, UART is gradually declining.
I2S (Inter-IC Sound Bus) is a bus standard established by Philips for audio data transmission between digital audio devices.

I2S typically consists of three lines (in addition to clock and data, there is also a left/right channel selection signal). I2S is primarily used for transmitting audio signals, such as in STBs, DVDs, and MP3 players.
The I2S standard specifies both hardware interface specifications and the format of digital audio data. I2S has three main signals: 1) Serial Clock SCLK, also known as Bit Clock (BCLK), which corresponds to each bit of digital audio data, with one pulse for each SCLK. The frequency of SCLK = 2 × sampling frequency × number of bits per sample. 2) Frame Clock LRCK (also known as WS), used to switch between left and right channel data. LRCK is ‘1’ when transmitting left channel data and ‘0’ when transmitting right channel data. The frequency of LRCK equals the sampling frequency. 3) Serial Data SDATA, which represents audio data in binary two’s complement format.
Sometimes, to better synchronize between systems, an additional signal MCLK, known as the Master Clock or System Clock (Sys Clock), is also transmitted, which is 256 or 384 times the sampling frequency.
GPIO (General Purpose Input Output) or bus expander simplifies the expansion of I/O ports using industrial standard I2C, SMBus, or SPI interfaces.
When a microcontroller or chipset lacks sufficient I/O ports, or when the system requires remote serial communication or control, GPIO products can provide additional control and monitoring capabilities. Each GPIO port can be configured as input or output through software. Maxim’s GPIO product line includes GPIOs with 8 to 28 ports, offering push-pull output or open-drain output, available in a compact 3mm x 3mm QFN package.
Advantages of GPIO (Port Expander):
Low power consumption: GPIO has lower power consumption (approximately 1μA, while μC operating current is 100μA).
Integrated IIC slave interface: GPIO has a built-in IIC slave interface, allowing it to operate at full speed even in standby mode.
Small package: GPIO devices offer the smallest package size – 3mm x 3mm QFN!
Low cost: You don’t pay for unused features!
Quick time to market: No need to write additional code, documentation, or maintenance work!
Flexible lighting control: Built-in multiple high-resolution PWM outputs.
Pre-determined response time: Shorten or determine the response time between external events and interrupts.
Better lighting effects: Matched current output ensures uniform display brightness.
Simple wiring: Only requires 2 IIC lines or 3 SPI lines.
SDIO
SDIO is an extension interface of the SD type, which can connect not only SD cards but also devices that support the SDIO interface. The port’s purpose is not limited to inserting storage cards. Devices such as PDAs, laptops, etc., that support the SDIO interface can connect to GPS receivers, Wi-Fi or Bluetooth adapters, modems, LAN adapters, barcode readers, FM radios, TV receivers, RFID readers, or digital cameras that use the SD standard interface.
The SDIO protocol evolved from the SD card protocol, retaining many aspects of the SD card’s read/write protocol while adding CMD52 and CMD53 commands on top of the SD card protocol. As a result, an important distinction between the SDIO and SD card specifications is the addition of a low-speed standard, aimed at supporting low-speed I/O capabilities with minimal hardware. Low-speed cards support applications like modems, barcode scanners, and GPS receivers, while high-speed cards support network cards, TV cards, and ‘combo’ cards, which refer to memory + SDIO.
Another important distinction between the SDIO and SD card specifications is the addition of a low-speed standard. SDIO cards only require SPI and 1-bit SD transfer mode. Low-speed cards aim to support low-speed I/O capabilities with minimal hardware costs, supporting applications like modems, barcode scanners, and GPS receivers. For combo cards, full-speed and 4BIT operations are mandatory for both the card’s memory and SDIO parts.
In non-combo SDIO devices, the maximum speed is limited to 25M, while combo cards can achieve speeds higher than 25M, similar to the maximum speed of SD cards.
CAN
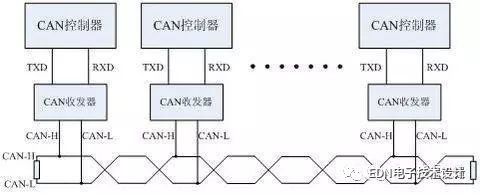
CAN, short for ‘Controller Area Network’, is one of the most widely used field buses internationally. Initially, CAN was designed for microcontroller communication in automotive environments, exchanging information between various electronic control units (ECUs) in vehicles, forming an automotive electronic control network. For example, engine management systems, transmission controllers, instrument equipment, and electronic backbone systems all embed CAN control devices.
In a single network constructed with CAN bus, theoretically, countless nodes can be connected. In practical applications, the number of nodes is limited by the electrical characteristics of the network hardware. For instance, when using the Philips P82C250 as a CAN transceiver, up to 110 nodes are allowed on the same network. CAN can provide data transmission rates of up to 1Mbit/s, making real-time control very easy. Additionally, the hardware’s error detection features enhance CAN’s resistance to electromagnetic interference.
Characteristics of the CAN bus:
1) It can operate in a multi-master mode, allowing any node on the network to actively send information to other nodes at any time, without distinguishing between master and slave, providing flexible communication.
2) Nodes on the network can be divided into different priority levels, meeting various real-time requirements.
3) It employs a non-destructive bit arbitration bus structure mechanism, where if two nodes transmit information simultaneously, the lower-priority node will actively stop data transmission, while the higher-priority node can continue transmitting without interruption.
4) It supports point-to-point, point-to-multipoint, and global broadcast data transmission methods.
5) The maximum direct communication distance can reach 10km (at speeds below 4Kbps).
6) The maximum communication speed can reach 1MB/s (with a maximum distance of 40m).
Finally, we have covered these tongue-twisting terms; the question is, do you understand them?
Source: EDN Electronic Technology DesignCopyright belongs to the original author. If there is any infringement, please contact for deletion.▍Recommended Reading I found another open-source serial port tool, it’s amazing What are 232
s485
s422? Common issues in serial communication explained, do you understand? Using the open-source button component Multi_Button, including test projects → Follow for more updates ←