1. Overview
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
1. Electrical Characteristics
1.1 Open-Drain for Bidirectional Communication
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
1.1.1 Open-Drain Pulling Low
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
1.1.2 Open-Drain Releasing the Bus
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
2. I2C Interface
2.1 Common Operations of I2C
-
Assuming a master wants to send data to a slave: -
The sending master sends a START condition and addresses the receiving slave -
The sending master sends data to the receiving slave -
The sending master ends the transmission by sending a STOP condition -
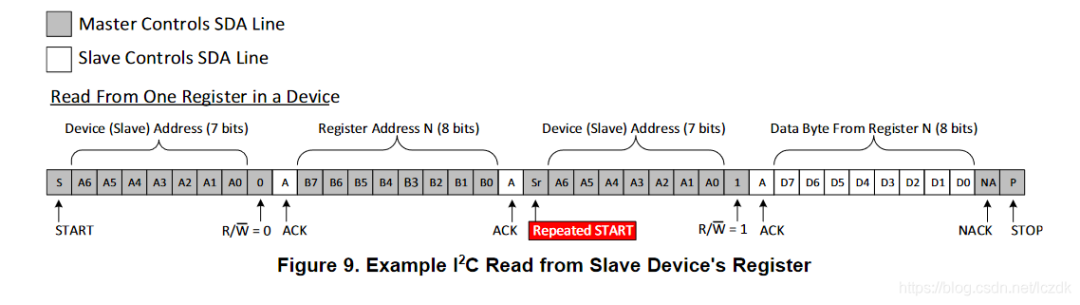
If the master wants to receive/read data from the slave: -
The receiving master sends a START condition and addresses the sending slave -
The receiving master sends the register address to be read from the sending slave -
The receiving master receives data from the sending slave -
The receiving master ends communication by sending a STOP condition
2.1.1 START and STOP Conditions
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
2.1.2 Repeated START Condition
2.2 Data Validity and Byte Format
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
2.3 Acknowledge (ACK) and Not Acknowledge (NACK)
-
The receiver cannot receive or send because it is performing some real-time functions and cannot communicate with the master. -
The receiver received unrecognized data or commands during transmission. -
The receiver cannot receive more data bytes during transmission (i.e., the buffer is full). -
The master, acting as the receiver, has completed data reading and sends a NACK to inform the slave.
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
3. Bus Data
3.1 Writing to a Slave on the I2C Bus
Source: https://www.ti.com/lit/an/slva704/slva704.pdf
3.2 Reading from a Slave on the I2C Bus
Original
Source
At:
Copyright belongs to the original author
or
Platform
All
for learning
reference and academic research
If there is infringement, please contact
to delete ~ thank you


👆 Long press the image, scan the code to apply 👆