Recently, Boston Dynamics released a “Goodbye, Hydraulic Atlas” video, announcing the official retirement of its famous hydraulic-driven bipedal humanoid robot Atlas. This video attracted widespread attention from everyone who loves humanoid robotics. However, within less than 24 hours of the announcement, the all-electric Atlas robot made its debut, becoming the continuing force in the company’s development efforts.
As a pioneer and technical benchmark in the global robotics industry, Boston Dynamics’ series of actions are both surprising and not unexpected. The biggest feature of the hydraulic version of Atlas is its excellent mobility, capable of performing parkour-like movements. However, the hydraulic system’s low energy efficiency, high number of components, complex manufacturing process, relatively slow response time, and high cost have also limited the commercialization of hydraulic Atlas. Boston Dynamics’ shift from the classic hydraulic solution to an electric drive solution is a signal to accelerate its commercialization efforts and once again proves the advantages of motor drives in the commercialization process of humanoid robots. Let’s talk about the power core of humanoid robots—motors and motor driver chips.
The electric version of Atlas is also very “cool”
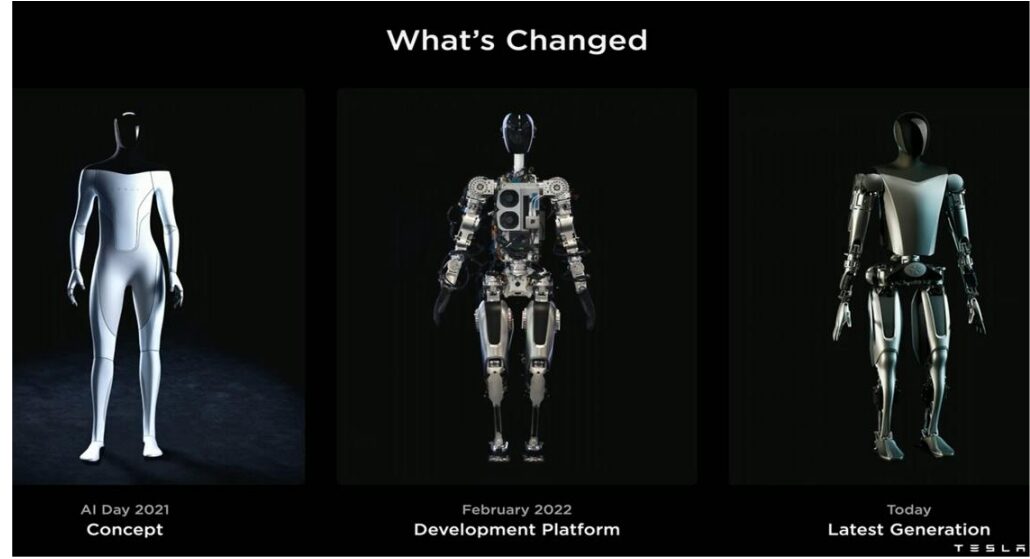
In the field of humanoid robot development, Boston Dynamics has always been at the forefront of the industry. The Atlas robot first appeared in 2013 and has now been in development for 10 years. When announcing the retirement of the hydraulic-driven humanoid robot Atlas, some industry insiders speculated, “It feels like hydraulic commercialization has no future, and they’re preparing to switch to electric drive.” Sure enough, the retirement announcement was in the morning, and the release was in the evening, indicating that Boston Dynamics had long been planning for electric-driven humanoid robots. This move is intended to fully showcase the new generation of electric-driven humanoid robots.
Boston Dynamics’ electric-driven humanoid robot also lives up to expectations. In the video, the electric version of Atlas stands up, walks steadily, and can rotate 360 degrees, showcasing incredible flexibility. Boston Dynamics stated, “The electric version of Atlas will be more powerful than any previous generation, with a wider range of motion.”

Electric version of Atlas
From a technical perspective, hydraulic drive systems generate high-pressure liquid through hydraulic pumps, converting hydraulic energy into mechanical energy to produce power for the output mechanism, driving the working mechanism. The advantages of this system include high torque density and higher torque output. This is one of the key factors that allow the hydraulic version of Atlas to perform parkour-like movements.
However, on the other hand, the drawbacks of hydraulic systems in robotic applications are also quite evident. First, the overall energy utilization efficiency of hydraulic systems is not high; second, the excessive number of system components makes reliability difficult to guarantee; third, the complex mechanical pump valve and the adaptation process of the servo motor system are complicated, with relatively slow response times; fourth, the high manufacturing technology requirements and complexity of the manufacturing process, especially for high-integrity hydraulic actuators, often cannot be met by conventional processing methods and equipment, leading to high development and production costs; fifth, the high production and maintenance costs result in high prices. Due to the complexity of hydraulic systems, the Atlas robot occasionally experiences oil leaks, necessitating a dedicated hydraulic maintenance team for upkeep. Therefore, from the perspective of humanoid robot development, motor-driven robots are more in line with the trends in robotics and automation.
The core components that enable 360-degree motion in humanoid robot joints
Motor drive involves directly driving loads with electric motors without the need for hydraulic transmission, offering advantages such as fast response time, easier maintenance, more precise motion control, higher energy efficiency, and faster commercialization. In fact, motors are ubiquitous in today’s society, with a wide range of applications beyond just humanoid robots.
Based on power supply classification, motors can be divided into DC motors and AC motors. Among DC motors, they can be further categorized by coil type into iron core motors and hollow cup motors. If categorized by purpose, they can be divided into drive motors and control motors. Drive motors include brushless motors and brushed DC motors, while control motors include stepper motors and servo motors.
As the core components for achieving motion in robot joints, motors have always been a focal point in hardware research for robotics. The dexterous hands of humanoid robots utilize hollow cup motors. Tesla’s humanoid robot Optimus employs a classic six-motor drive scheme made up of hollow cup motors + drivers + reducers + encoders, with the thumb using dual motors for bending and lateral movement, and each of the other four fingers driven by a single motor.

Tesla Optimus hand joint, driven by hollow cup motors
A hollow cup motor is a type of miniature servo motor commonly used in portable air sampling pumps, bionic hands, handheld power tools, and other scenarios. It is highly compatible with hand joints and can utilize permanent magnets to generate a magnetic field, enabling DC power supply. Unlike traditional motors, the hollow cup motor features a rotor without an iron core, resulting in low losses, reduced friction, and good heat dissipation, making it an ideal choice for battery-powered devices.
Other joints of humanoid robots use frameless torque motors. The Tesla humanoid robot has a total of 28 actuators distributed across the shoulders (6), elbows (2), wrists (6), torso (2), hips (6), knees (2), and ankles (4), with 14 rotational actuators and 14 linear actuators. The rotational actuators mainly consist of frameless torque motors + harmonic reducers + torque sensors + position sensors + bearings (angular contact ball bearings + crossed cylindrical roller bearings) + encoders.
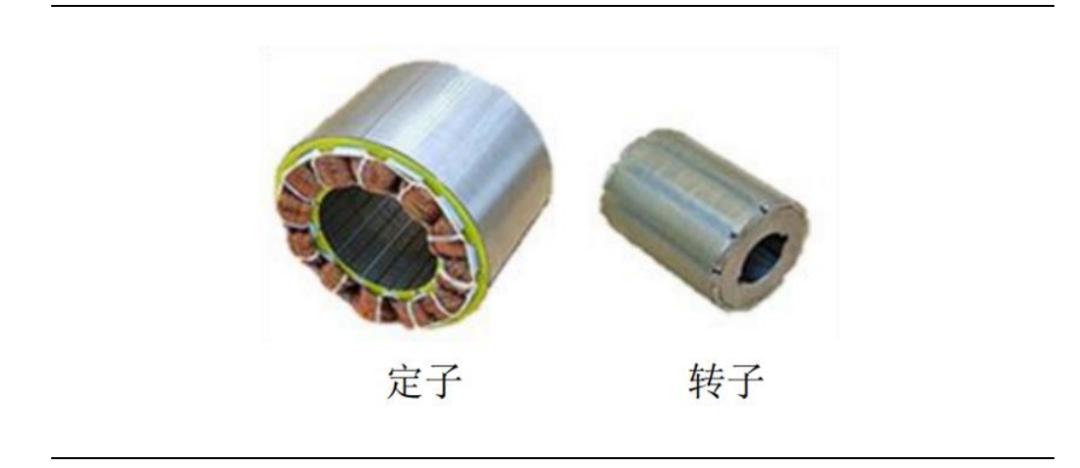
Frameless torque motors consist only of a stator and rotor
Frameless torque motors are a special type of servo motor that are applied in robot joints due to their advantages of low speed, high torque, and fast response. Frameless torque motors can be seen as traditional servo motors with a high number of pole pairs, using torque to control direction and employing open-loop control, featuring low speed, high torque, strong overload capacity, fast response, and good linearity characteristics. Frameless torque motors have soft mechanical characteristics and can stall; when the load torque increases, they can automatically reduce speed while increasing output torque; when the load torque is at a certain value, adjusting the motor terminal voltage can change the speed. Frameless torque motors eliminate the casing, consisting only of the rotor and stator, supported by bearings in the motor body. Humanoid robots require motors that can provide instantaneous explosive power output during fast running and jumping, thus the joint motors need to have high overload capacity and high dynamic response capabilities, with overall requirements for the motor being lightweight, compact, and high torque. The unique design and advantages of frameless torque motors make them widely used in robot joints. Domestic humanoid robots such as Yu Shu H1, Expedition A1, Xiaomi Cyber One, Ubtech X1, and Fourier GR-1 also use frameless torque motors for their joint units. According to Technavio, the global sales scale of torque motors is expected to reach 903 million USD by 2027, with a CAGR of 8% from 2022 to 2027. Considering the mass production of humanoid robots, the growth rate is expected to increase further.
And the “core” behind the motor
Motor driver chips are used for motor control, allowing for various modes of control over the motor’s rotation direction, speed, and movement patterns through the control of the driver. For example, stepper motor driver chips can achieve high-precision angle and position control by setting different control parameters. Motor driver chips have developed over several decades, initially relying on discrete components to build driver circuits. With the continuous advancement of integrated circuit technology and power electronics technology, motor driver chips have gradually achieved integration, miniaturization, and intelligence. Currently, wide bandgap semiconductor materials like SiC and GaN are rapidly applied in power devices, bringing more innovative vitality to motor driver chips.
The joints of humanoid robots, especially the hands, have a notable characteristic of having a particularly high degree of freedom. According to publicly available information, the total DOF (Degrees of Freedom) of humanoid robots is no less than 30, which includes 27 joints, each of which is driven by a motor. With so many motors in operation, how to achieve high, precise, and accurate control over these motors requires the motor driver chips to play a crucial role.
Frameless torque motors consist only of a stator and rotor
First, humanoid robots require higher performance and stronger stability from motor driver chips. The working environment of humanoid robots is complex, especially for those used in factory production activities, which may operate in environments with high voltage and large current, imposing higher stability requirements on the chips. Additionally, the joints of humanoid robots must achieve high speeds and frequent forward and reverse rotations to realize high degrees of freedom, which also places higher performance demands on the motors and driver chips, allowing for faster and more accurate torque control. Secondly, the motion control of humanoid robots involves a large number of electronic components, including various types of sensors, and higher integration control driver chips that incorporate sensors, MCUs, power devices, etc., will be an important development direction. Thirdly, lower power consumption. Low power consumption can extend the working time of motors and reduce system heating, which is particularly important for humanoid robots with limited joint space and battery power supply. Furthermore, smaller size, high cost performance, safety, programmability, and other aspects are also development directions for electric driver chips in humanoid robots.
Multicore architecture and integration will be one of the main trends in the development of motor driver chips for humanoid robots. Currently, the requirements for motor control are becoming increasingly complex, with more functions and stronger performance, making it increasingly difficult to rely on traditional chip processes. Multicore architecture allows motor chips to achieve higher performance control at lower process costs, making it a key development direction. Additionally, traditional intelligent power modules integrate drivers and power devices together. There are now solutions that integrate MCUs and sensors, forming IPMs that differ significantly from traditional IPM structures. As humanoid robots impose higher demands on space and cost, the multicore and integrated development of driver chips will also become more apparent.