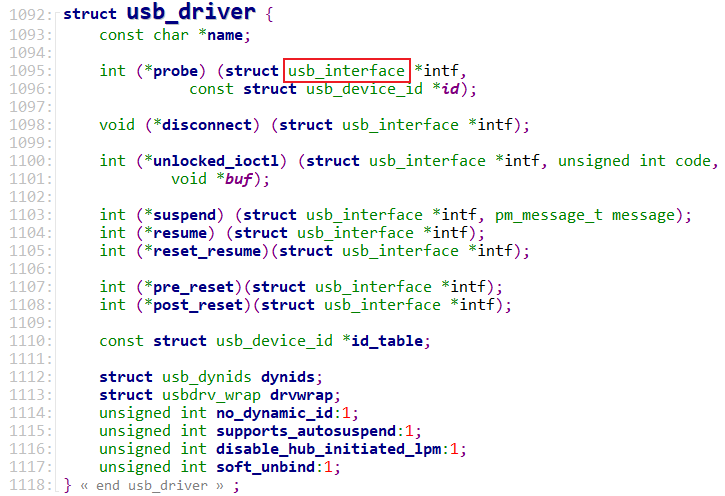
Linux kernel source: include/linux/usb.h
Linux kernel source: drivers/hid/usbhid/usbmouse.c
1. BUS/DEV/DRV Model
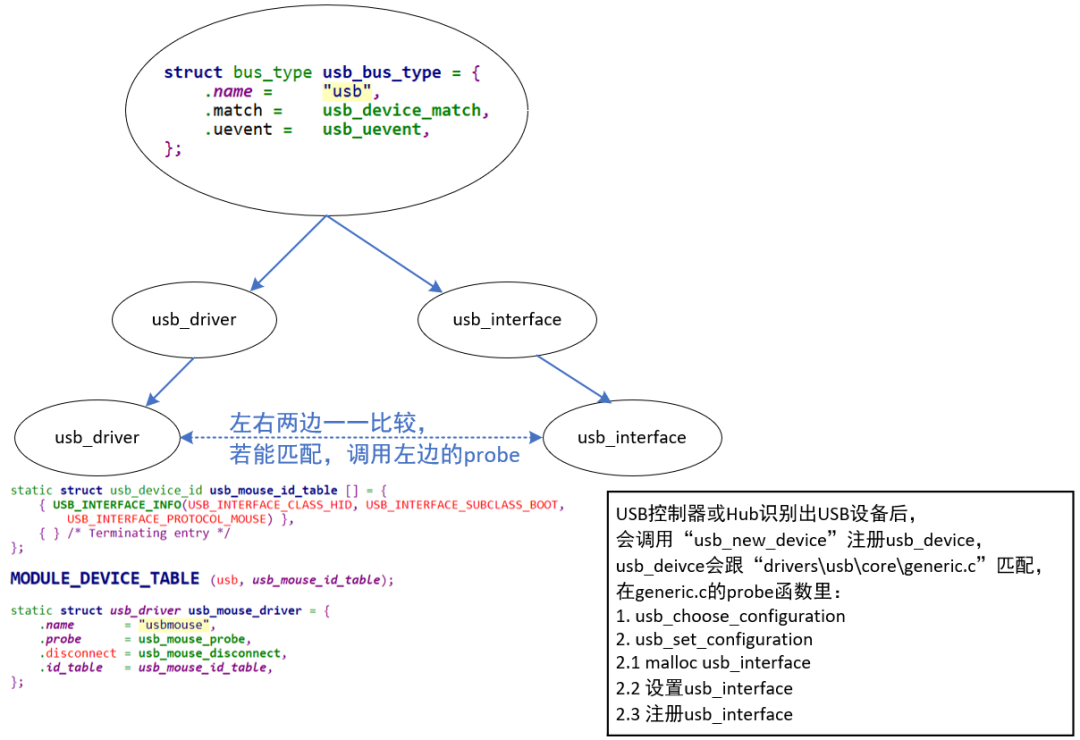
“USB Interface” is a logical USB device, and the usb_driver driver written supports the “USB interface”:
-
After the USB controller or Hub recognizes the USB device, it will create and register usb_device
-
Once usb_device is claimed by the driver in “drivers/usb/core/generic.c”, it will select and set a configuration
-
Interfaces under this configuration will allocate, set up, and register a usb_interface
-
If the left usb_driver matches the right usb_interface, usb_driver.probe will be called
2. Interface Functions
In the USB device driver, all usable USB functions are in this header file: include/linux/usb.h.
2.1 Pipe
The main purpose of using these interface functions is to transfer data, the object of data transfer is an endpoint in the USB device, which is called a pipe:
/* Create various pipes... */
#define usb_sndctrlpipe(dev, endpoint) \
((PIPE_CONTROL << 30) | __create_pipe(dev, endpoint))
#define usb_rcvctrlpipe(dev, endpoint) \
((PIPE_CONTROL << 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndisocpipe(dev, endpoint) \
((PIPE_ISOCHRONOUS << 30) | __create_pipe(dev, endpoint))
#define usb_rcvisocpipe(dev, endpoint) \
((PIPE_ISOCHRONOUS << 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndbulkpipe(dev, endpoint) \
((PIPE_BULK << 30) | __create_pipe(dev, endpoint))
#define usb_rcvbulkpipe(dev, endpoint) \
((PIPE_BULK << 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndintpipe(dev, endpoint) \
((PIPE_INTERRUPT << 30) | __create_pipe(dev, endpoint))
#define usb_rcvintpipe(dev, endpoint) \
((PIPE_INTERRUPT << 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
2.2 Synchronous Transfer Functions
For control transfer, bulk transfer, and interrupt transfer, there are 3 synchronous functions that can be used to initiate the transfer directly. These functions internally create, populate, and submit a URB (“usb request block”), and wait for it to complete or time out.
The function prototypes are as follows:
int usb_control_msg(struct usb_device *dev, unsigned int pipe, __u8 request,
__u8 requesttype, __u16 value, __u16 index, void *data,
__u16 size, int timeout);
int usb_bulk_msg(struct usb_device *usb_dev, unsigned int pipe,
void *data, int len, int *actual_length, int timeout);
int usb_interrupt_msg(struct usb_device *usb_dev, unsigned int pipe,
void *data, int len, int *actual_length, int timeout);
2.3 Asynchronous Transfer Functions
When transferring with URB, it is asynchronous: you need to first allocate, construct, and submit a URB (“usb request block”), and when the transfer is complete, its callback function is called.
The key lies in filling the URB:
-
dev: who to transfer data with -
pipe: which pipe to transfer data with -
buffer: contains the data to be sent or used to receive the data to be read -
data length -
callback function
2.3.1 Allocate and Free URB
The function prototypes are as follows:
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags);
void usb_free_urb(struct urb *urb);
2.3.2 Allocate/Free DMA Buffer
When initiating USB transfer, data is stored in the buffer. This buffer can be a regular buffer or a DMA buffer.
For a regular buffer, a DMA buffer is temporarily allocated when submitting the URB:
-
When sending data: the function internally copies data from the regular buffer to the DMA buffer before submitting it to the USB controller -
When reading data: the USB controller first sends data to the DMA buffer, and the function internally copies the data from the DMA buffer to the regular buffer -
This adds an additional data copy, which is inefficient
We can directly use the DMA buffer, the function prototypes are as follows:
void *usb_alloc_coherent(struct usb_device *dev, size_t size, gfp_t mem_flags,dma_addr_t *dma);
void usb_free_coherent(struct usb_device *dev, size_t size, void *addr,dma_addr_t dma);
2.3.3 Fill URB
For control transfer, bulk transfer, and interrupt transfer, the following functions are available:
static inline void usb_fill_control_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
unsigned char *setup_packet,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context);
static inline void usb_fill_bulk_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context);
static inline void usb_fill_int_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context,
int interval);
If the URB uses a DMA buffer, then it is also necessary to set a flag to indicate this:
urb->transfer_dma = DMA address of buffer; // output parameter of usb_alloc_coherent
urb->transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
2.3.4 Submit URB
After constructing the URB, it needs to be submitted to the USB system to start the transfer.
int usb_submit_urb(struct urb *urb, gfp_t mem_flags);
2.3.5 Cancel URB
Submitted URB can be canceled, there are 2 functions:
-
usb_kill_urb: this is a synchronous function, it will wait for the URB to finish -
usb_unlink_urb: this is an asynchronous function, it will not wait for the URB to finish, the USB controller driver will call its callback function
void usb_kill_urb(struct urb *urb);
int usb_unlink_urb(struct urb *urb);