Control Framework and Performance Analysis
Force control robots are robotic systems capable of controlling and interacting based on external forces. Compared to traditional position-controlled robots, force control robots are more flexible and adaptable, enabling safe interaction with the environment and human operators.
The core idea of force control robots is to measure the forces and torques between the robot and the environment using sensors, and to use this information as control input for real-time adjustments. They can perceive and respond to the magnitude and direction of external forces, allowing them to adapt to different working environments and task requirements.
The control framework of force control robots typically includes the following key components:
1. Force Sensors: Used to measure the forces and torques between the robot and the environment. Common force sensors include pressure sensors, force-sensitive resistors, and strain gauges.
2. Control Algorithms: The control algorithms for force control robots calculate the control commands in real-time based on the force information feedback from the sensors. Common control algorithms include PID control, impedance control, and admittance control.
3. Actuators: The actuators of force control robots adjust the forces and torques of the robot according to the control commands. Common actuators include motors and hydraulic drives.
4. Interaction Interface: Force control robots typically need to interact with human operators, so a user-friendly interaction interface is required to facilitate monitoring and adjustment of the robot’s behavior by the operator.
Performance evaluation of force control robots can be conducted from multiple aspects, with some common performance indicators including:
1. Dynamic Response: The dynamic response capability of force control robots is an important indicator for evaluating their control performance. It can be assessed by observing the robot’s real-time adjustments to external forces, including response speed, stability, and accuracy.
2. Contact Sensing and Control: The contact sensing and control capability of force control robots is an important indicator for evaluating their interaction with the environment. It includes accurate perception of the magnitude and direction of contact forces, as well as the ability to reasonably adjust and control these forces.
3. Safety: The safety of force control robots is an important indicator for evaluating their interaction with human operators and the environment. It includes the robot’s ability to perceive and respond to external forces, as well as its safety response capabilities in the event of unexpected collisions or abnormal situations.
4. Accuracy and Stability: The accuracy and stability of force control robots are important indicators for evaluating their performance in executing force control tasks. This includes the accuracy and stability of the robot when applying and maintaining specific forces and torques.
Through performance analysis and evaluation of force control robots, their control algorithms and system designs can be further optimized to enhance their interaction performance and adaptability.
Common force control robots include:
Franka Emika Robot: https://www.franka.de/

Force control robots often employ compliant control algorithms for direct or indirect physical interaction between humans, the environment, and robots. Compliant control can manipulate the flexible characteristics and dynamic behavior of the controlled system, which can be categorized into passive compliance and active compliance, as shown in the figure below:

The interaction control framework of force control robots is a control system designed to achieve force interaction between the robot and the external environment or operator.
In the interaction control of force control robots, three main methods are primarily involved: direct force control, impedance control, and admittance control. Below are the frameworks and performance analyses of these control methods:
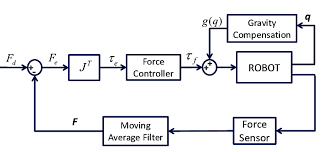
1. Direct Force Control Framework:
Force/Torque Sensors: Used to measure the forces and torques between the robot and the environment.
Force/Torque Controller: Generates control commands to achieve the desired force interaction based on sensor measurements and the expected force/torque commands.
Motion Controller: Used to control the joints or end effectors of the robot to achieve the desired motion trajectory.
Environment Modeling and Recognition: Used to perceive and recognize the environment to help the robot adapt to environmental changes.
Performance Analysis:
• Force Tracking Performance: Evaluates the ability of the force controller to achieve the desired force tracking.
• Motion Trajectory Tracking Performance: Evaluates the ability of the motion controller to achieve the desired motion trajectory tracking.
• Dynamic Response Performance: Evaluates the system’s response speed and stability to changes in external forces.
• Force/Position Error Analysis: Analyzes the errors between force control and position control to assess the system’s accuracy and stability.
• Stability Analysis: Evaluates the stability of the force control system through methods such as linear stability analysis or Lyapunov stability analysis.
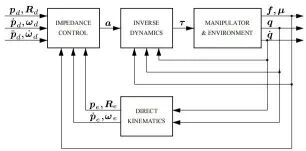
2. Impedance Control Framework:
Force/Torque Sensors: Used to measure the forces and torques between the robot and the environment.
Impedance Controller: Generates control commands to achieve the desired impedance interaction based on sensor measurements and the expected force/torque commands.
Motion Controller: Used to control the joints or end effectors of the robot to achieve the desired motion trajectory.
Environment Modeling and Recognition: Used to perceive and recognize the environment to help the robot adapt to environmental changes.
Performance Analysis:
• Impedance Response Performance: Evaluates the response speed and stability of the impedance controller to changes in external forces.
• Impedance Parameter Analysis: Analyzes the impact of parameters in the impedance controller on system performance, such as damping, stiffness, and mass.
• Impedance Stability Analysis: Evaluates the stability of the impedance control system, including impedance stability boundaries and the stability range of impedance parameters.
• Dynamic Performance Analysis: Analyzes the dynamic response performance of the impedance controller to external force changes at different frequencies.
• Impedance Control Accuracy Analysis: Evaluates the accuracy and stability of the impedance controller in achieving the desired impedance response.
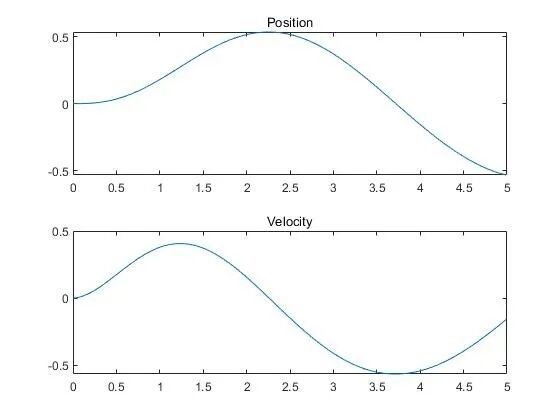
Below is a simple implementation of impedance control in MATLAB:
% Define impedance control parametersM = 5;B = 10;K = 20;% Define initial position and velocityx = 0;xdot = 0;% Define time step and simulation time dt = 0.01;T = 5;% Initialize position and velocity arraysx_arr = zeros(1, T/dt);xdot_arr = zeros(1, T/dt);% Perform impedance control simulationfor i = 1:T/dt % Calculate external force F_ext = 10 * sin(i*dt); % Calculate acceleration xddot = (F_ext - B*xdot - K*x) / M; % Update position and velocity xdot = xdot + xddot*dt; x = x + xdot*dt; % Store position and velocity x_arr(i) = x; xdot_arr(i) = xdot;end% Plot position and velocity graphs t = 0:dt:T-dt;subplot(2,1,1)plot(t, x_arr)title('Position')subplot(2,1,2)plot(t, xdot_arr)title('Velocity')The simulation results are as follows:
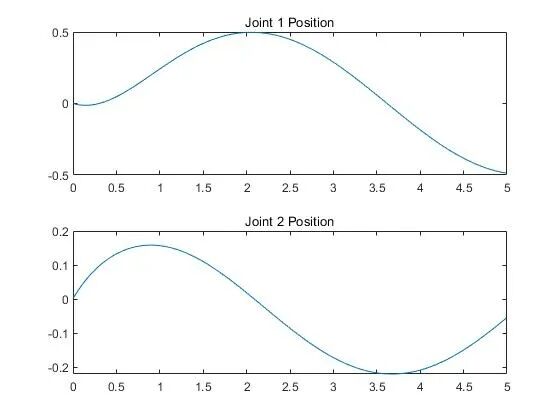
For impedance control of a two-link robotic arm, the dynamics model of the arm needs to be considered. More information is needed to determine the arm’s parameters and control objectives:
% Define impedance control parametersMd = diag([5, 5]);Bd = diag([10, 10]);Kd = diag([20, 20]);% Define arm mass and initial positionm1 = 1;m2 = 1;l1 = 1;l2 = 1;q = [0; 0];qdot = [0; 0];% Define time step and simulation timedt = 0.01;T = 5;% Initialize position arrayq_arr = zeros(2, T/dt);% Perform impedance control simulationfor i = 1:T/dt % Calculate external torque tau_ext = [10 * sin(i*dt); 5 * cos(i*dt)]; % Calculate joint inertia matrix M = [(m1+m2)*l1^2 + m2*l2^2 + 2*m2*l1*l2*cos(q(2)), m2*l2^2 + m2*l1*l2*cos(q(2)); m2*l2^2 + m2*l1*l2*cos(q(2)), m2*l2^2]; % Calculate centrifugal and Coriolis force matrix C = [-m2*l1*l2*sin(q(2))*qdot(2), -m2*l1*l2*sin(q(2))*(qdot(1)+qdot(2)); m2*l1*l2*sin(q(2))*qdot(1), 0]; % Calculate gravity matrix G = [(m1+m2)*l1*9.8*cos(q(1)) + m2*l2*9.8*cos(q(1)+q(2)); m2*l2*9.8*cos(q(1)+q(2))]; % Calculate desired acceleration qddot_d = Md \ (tau_ext - Bd*qdot - Kd*q); % Calculate control torque tau = M*qddot_d + C*qdot + G - Bd*qdot - Kd*q; % Update position and velocity qddot = M \ (tau + tau_ext - C*qdot - G); qdot = qdot + qddot * dt; q = q + qdot * dt; % Store position q_arr(:,i) = q;end% Plot position graphs t = 0:dt:T-dt;subplot(211)plot(t, q_arr(1,:))title('Joint 1 Position')subplot(212)plot(t, q_arr(2,:))title('Joint 2 Position')The simulation results are as follows:
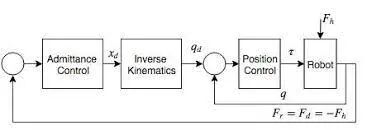
3. Admittance Control Framework:
Force/Torque Sensors: Used to measure the forces and torques between the robot and the environment.
Admittance Controller: Generates control commands to achieve the desired admittance interaction based on sensor measurements and the expected force/torque commands.
Motion Controller: Used to control the joints or end effectors of the robot to achieve the desired motion trajectory.
Environment Modeling and Recognition: Used to perceive and recognize the environment to help the robot adapt to environmental changes.
Performance Analysis:
• Admittance Response Performance: Evaluates the response speed and stability of the admittance controller to changes in external forces.
• Admittance Parameter Analysis: Analyzes the impact of parameters in the admittance controller on system performance, such as admittance stiffness and admittance damping.
• Admittance Stability Analysis: Evaluates the stability of the admittance control system, including admittance stability boundaries and the stability range of admittance parameters.
• Dynamic Performance Analysis: Analyzes the dynamic response performance of the admittance controller to external force changes at different frequencies.
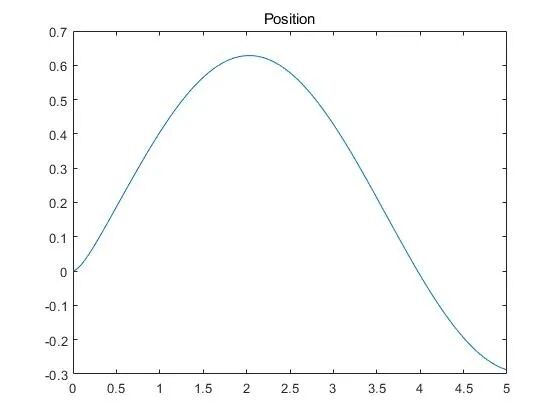
Implementation of admittance control for a single degree of freedom robotic arm in MATLAB:
% Define admittance control parametersMd = 5;Bd = 10;Kd = 20;% Define arm mass and initial positionm = 1;x = 0;xdot = 0;% Define desired position and velocityxd = 1;xdot_d = 0;% Define time step and simulation time dt = 0.01;T = 5;% Initialize position arrayx_arr = zeros(1, T/dt);% Perform admittance control simulationfor i = 1:T/dt % Calculate external force F_ext = 10 * sin(i*dt); % Calculate desired acceleration xddot_d = (F_ext - Bd*(xdot-xdot_d) - Kd*(x-xd)) / Md; % Calculate control force F = m * xddot_d - Bd * xdot - Kd * x; % Update position and velocity xdot = xdot + (F + F_ext) / m * dt; x = x + xdot * dt; % Store position x_arr(i) = x;end% Plot position graphs t = 0:dt:T-dt;plot(t, x_arr)title('Position')The simulation results are as follows:
Through performance analysis of the interaction control framework of force control robots, the stability, accuracy, response performance, and adaptability of the system can be evaluated and optimized to achieve efficient, safe, and reliable force interaction with the external environment or operator.
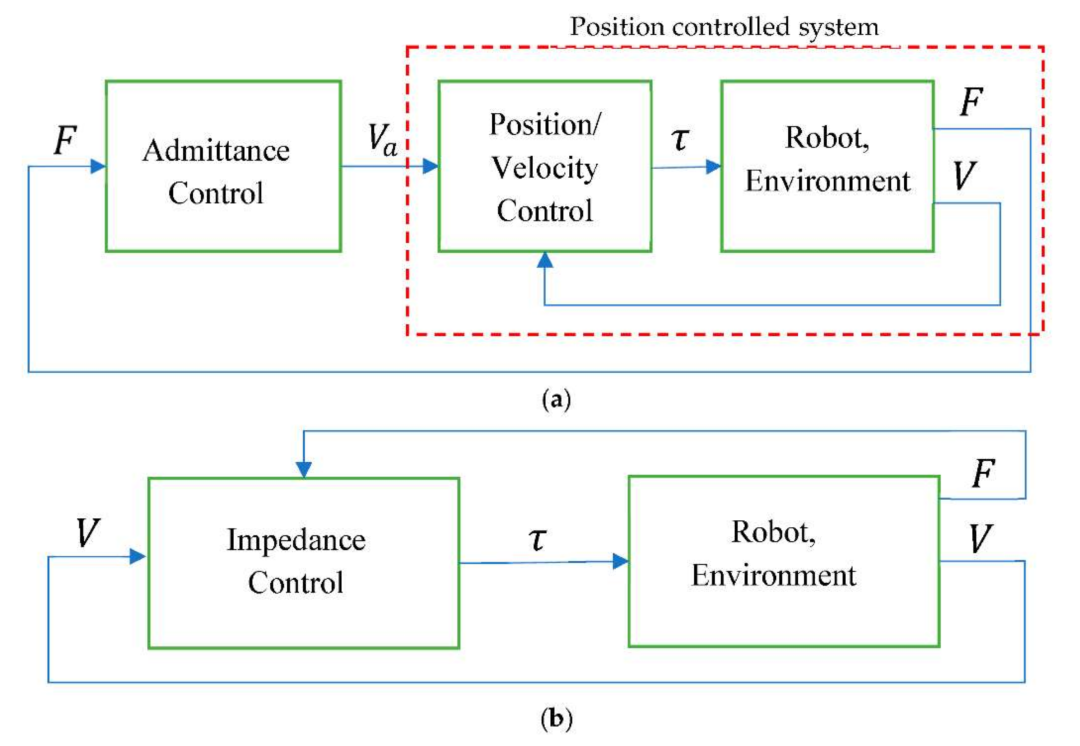
Block diagrams of impedance control and admittance control are shown in figures (a) and (b) respectively:
And the control framework in transfer function form is shown in the figure below:
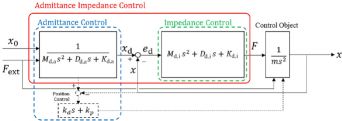
Reference link: Series admittance–impedance controller for more robust and stable extension of force control | ROBOMECH Journal |
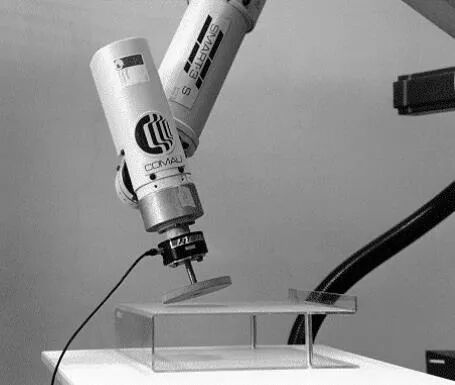
Robots with end force sensors are shown in the figure below:
In physical human-robot interaction control, commonly used performance quantification indicators include:
1. Action Accuracy: Measures the error between the actual action and the expected action in human-robot interaction. High accuracy indicates good consistency between the actual action and the expected action, and the control system can accurately perceive and execute human intentions.
2. Action Smoothness: Indicates the continuity and smoothness of the actual action. Smooth actions have less jitter and abrupt changes, providing a more natural and comfortable human-robot interaction experience.
3. Action Response Time: Refers to the time required for the control system to respond to human commands or action requests. Shorter response times provide a more real-time interaction experience.
4. Action Force: Indicates the magnitude of the actual force or torque applied. The appropriateness of the force depends on specific task requirements; excessive or insufficient force may affect interaction effectiveness and safety.
5. Load Adaptation: Indicates the control system’s ability to adapt to different load conditions. In physical human-robot interaction, the strength and range of motion of human muscles may vary, and the control system needs to adaptively adjust its control strategy based on different load conditions.
6. Stability: Refers to the stability performance of the control system when facing external disturbances or parameter changes. Stability assessment can be conducted using frequency domain analysis or time domain analysis methods, such as determining the stability boundaries of the system and assessing whether the system meets stability conditions.
7. Interaction Efficiency: Indicates the efficiency of the control system in achieving human-robot interaction tasks. Higher interaction efficiency means the control system can complete interaction tasks with greater speed and accuracy.
8. User Satisfaction: Assesses the user’s satisfaction with the interaction process and results. User satisfaction can be evaluated through surveys, subjective evaluations, or behavioral observations.
These performance quantification indicators can be selected and customized based on specific physical human-robot interaction tasks and application scenarios to assess the performance and interaction effects of the control system, providing references for controller design and optimization.
In impedance control, commonly used performance quantification indicators include:
1. Contact Force Accuracy: Measures the error between the actual contact force and the expected contact force. High accuracy indicates that the actual contact force can remain consistent with the expected contact force, and the control system can accurately perceive and control the contact force.
2. Impedance Response Time: Refers to the time required for the control system to respond to changes in external forces or torques. Shorter response times provide faster and more stable impedance adjustments, allowing the robot to adapt promptly to different environmental and task requirements.
3. Impedance Stability: Indicates the stability performance of the control system when facing external disturbances or parameter changes. Stability assessment can be conducted using frequency domain analysis or time domain analysis methods, such as determining the stability boundaries of the system and assessing whether the system meets stability conditions.
4. Impedance Control Accuracy: Measures the error between the actual impedance and the expected impedance. High accuracy indicates that the actual impedance can remain consistent with the expected impedance, and the control system can accurately adjust the robot’s stiffness, damping, and mass parameters.
5. Action Smoothness: Indicates the continuity and smoothness of the actual action. Smooth actions have less jitter and abrupt changes, providing a more natural and comfortable physical interaction experience.
6. Energy Transfer Efficiency: Measures the efficiency of the robot’s response to external forces or torques and energy transfer. Higher energy transfer efficiency means the robot can effectively absorb, dissipate, or feedback external forces to achieve stable physical interaction.
References:
【1】
https://baike.baidu.com/item/%E5%8A%9B%E6%8E%A7%E6%9C%BA%E5%99%A8%E4%BA%BA/55623439?fr=ge_ala
【2】
https://zhuanlan.zhihu.com/p/126338809
【3】
Li Zhengyi. Research and Application of Force/Position Control Technology between Robots and the Environment [D]. Huazhong University of Science and Technology, 2011.
【4】
Yang Zhen. Research on Robot Compliance Control Method Based on Impedance Control [D]. Southeast University, 2005.

↑ Hot course, limited time coupon! 🎉 Grab it now ↑

