The Tesla humanoid robot is on the verge of mass production, expected to bring a “catalyst effect” to the global robotics market.
Recently, Tesla CEO Elon Musk announced the latest production plan for the humanoid robot Optimus.
According to the plan, Tesla aims to increase the production of humanoid robots to 50,000 to 100,000 units by 2026, and further increase it to 1 million units in 2027, achieving a target of tenfold growth in production for two consecutive years.
Musk stated, “If all goes well, by next year (2026), production will increase tenfold, with a target of producing 50,000 to 100,000 humanoid robots, and the following year will see another tenfold increase.”

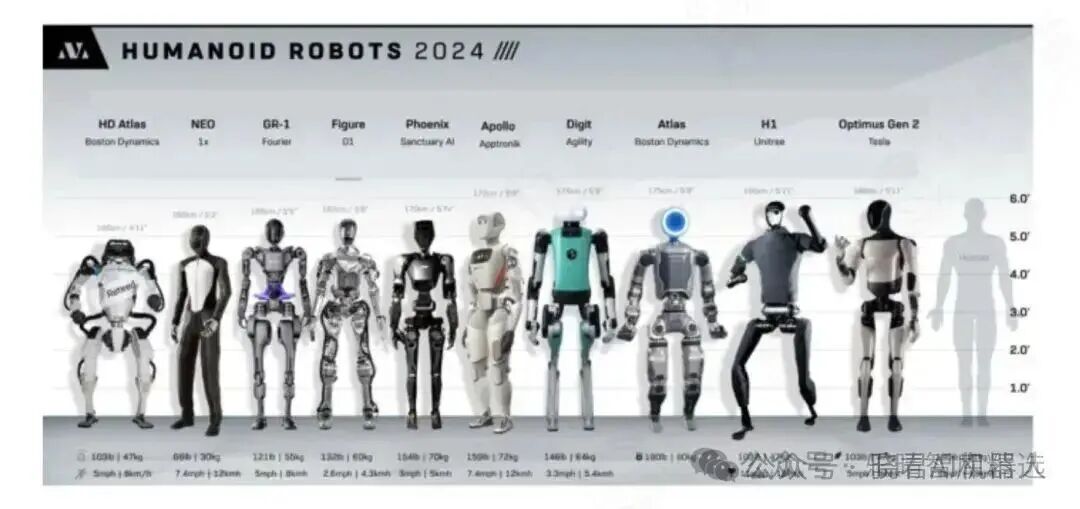
Additionally, at CES 2025 (Consumer Electronics Show), several domestic and international manufacturers showcased humanoid robot products and technologies.
NVIDIA presented 14 humanoid robots, six of which are from China, including Zhiyuan Expedition A2, Star Movement Star1, Galaxy General G1, Yushu H1, and Xiaopeng Iron, among others. NVIDIA has partnered with several humanoid robot companies, including Boston Dynamics, Figure AI, Yushu Technology, and Xiaopeng Motors, to provide AI technology, simulation platforms, and computing hardware support.
Domestically, companies like UBTECH, Yushu, Fourier, Zhiyuan, and Leju are accelerating their leadership in the humanoid robot industry; Huawei, Xiaopeng, Xiaomi, and GAC Group are also increasing their investments in the humanoid robot sector, with heavyweight players continuously emerging to accelerate industry development.
The Tesla humanoid robot is a bellwether for the global robotics industry. With the imminent mass production of the Tesla humanoid robot, various segments of the domestic industry chain are expected to accelerate and seize opportunities.
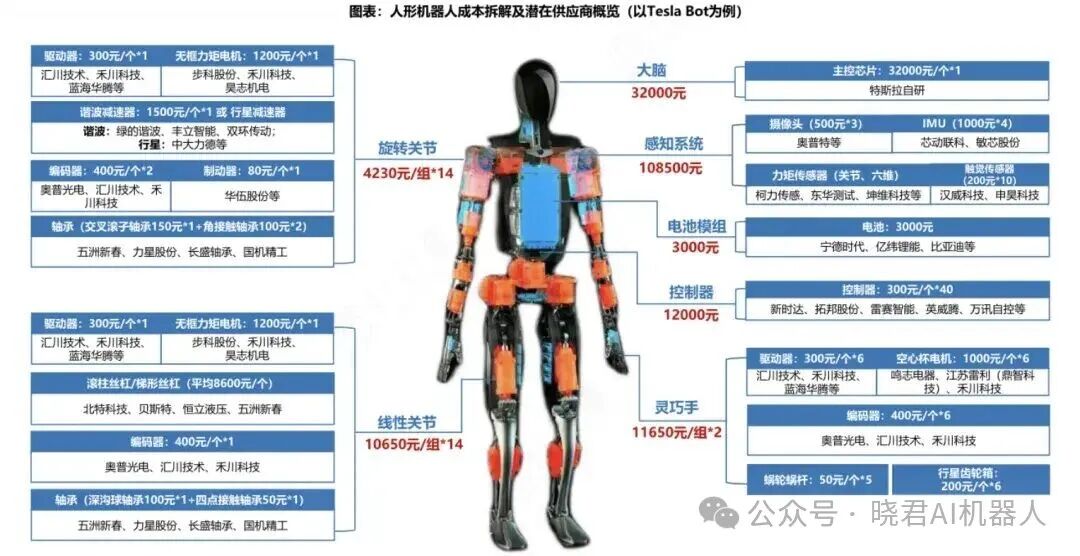
From the perspective of the humanoid robot supply chain, key high-value components such as dexterous hands, lead screws, reducers, sensors, motors, and controllers are worth focusing on. This article will break down each major sub-segment.
Source: Tesla AI Day, Vehicle, Zhonghang Securities, Hanghang Check
01. Humanoid Robot Joints
The Tesla humanoid robot Optimus has 28 degrees of freedom throughout its body, with the upper limbs using rotary joints and the lower limbs using linear actuator schemes.
The cost of the joints accounts for approximately 55% of the overall cost, mainly including rotary joints, linear joints, and dexterous hands.
1. Rotary Joints
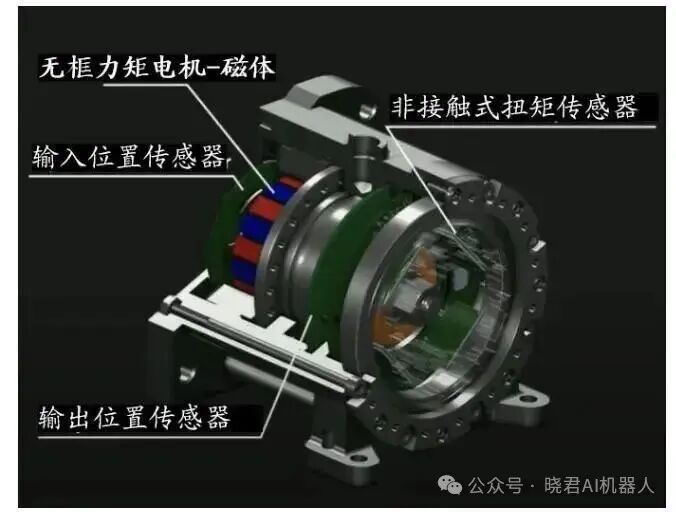
Rotary joints mainly consist of actuators, frameless torque motors, harmonic reducers, encoders, mechanical clutches, bearings, etc., with 14 rotary joints accounting for approximately 14.1% of the total cost.
Frameless Torque Motors
Frameless torque motors are used in both the 14 linear actuators and 14 rotary actuators of the Tesla humanoid robot.
As a core component of humanoid robots, frameless torque motors can achieve extremely high control precision, used for both linear and rotary joints in humanoid robots.
Frameless torque motors are a type of torque motor, characterized by the magnitude of the output torque, and can typically be seen as brushless, permanent magnet, direct-drive servo motors with a very high pole count.
Domestic humanoid robot manufacturers such as Yushu H1, Expedition A1, Xiaomi Cyberone, UBTECH X1, and Fourier GR-1 also use frameless torque motors in their joint units, with a maximum torque of 360Nm.
Frameless torque motors in rotary joints:
Currently, frameless torque motors have a high technical barrier, with the global market being highly concentrated among leading manufacturers.
Major manufacturers include Kollmorgen (USA), Wittenstein (Germany), Nidec (Japan), Parker Hannifin (USA), and MAXON MOTOR (Switzerland).
Kollmorgen was one of the first companies to develop frameless motors, possessing core production technology for high-end products, with the KBM series frameless motors being the company’s star products.
There are few players in the domestic frameless motor industry, with a high concentration, and leading companies dominate the market.
According to public information, the main participants in the domestic frameless motor industry include Boke Co., Haoshi Electromechanical, Weichuang Electric, and Hechuan Technology.
Moreover, the performance of frameless torque motors largely depends on their motor structure and encoders.
Encoders affect the motor’s motion control functions, with high-end products relying on imported key component chips and the complexity of encoder manufacturing processes being a major barrier to domestic production.
In terms of market structure, the encoder market has long been dominated by overseas companies, such as Heidenhain, Tamagawa, and Renishaw. According to MIR data, in 2023, Tamagawa and Heidenhain together accounted for about 42% of the market share in China.
Leading domestic suppliers include Yuheng Optics (Aopu Optoelectronics), Changchun Huitong (Inovance Technology), Yike Electronics, and Suzhou Jiezhi Shuo, with Yuheng Optics being a leader in the domestic market, capable of competing with foreign companies, holding a market share of about 7.7%.
Overall, the domestic frameless motor industry is still in its infancy, with few market participants and significant potential for domestic substitution.
Harmonic Reducers
Reducers are high-value components used in humanoid robots, with a cost share as high as 35%.
Reducers are widely used in joint areas of humanoid robots, such as elbow joints and wrist joints, to achieve precise transmission and control.
Harmonic reducers are often used in these areas that require fine operations due to their small size, light weight, and high transmission ratio.
A harmonic reducer is a transmission device that uses a wave generator to create controllable elastic deformation waves in a flexible wheel, achieving motion and power transmission through interaction with a rigid wheel.
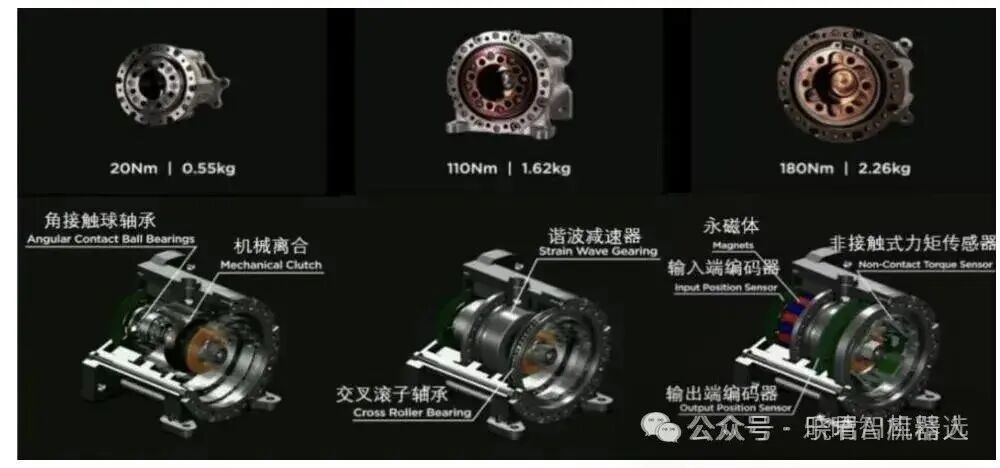
The Tesla Optimus humanoid robot mainly uses harmonic reducers and planetary reducers, with all 14 rotary joints employing harmonic reducers, while the hand’s 12 degrees of freedom use planetary gearboxes.
Reducer scheme for Tesla Optimus robot:
In terms of the global market structure for harmonic reducers, the Japanese leader Harmonic Drive monopolizes the harmonic reducer market, with a global share exceeding 80%.
The domestic harmonic reducer market is relatively concentrated, with the top five manufacturers accounting for over 60% of shipments. Green Harmonic leads the domestic substitution, while companies like Laifu Harmonic, Tongchuan Technology, and Dazhu Precision are also accelerating their market layout.
Servo Drives
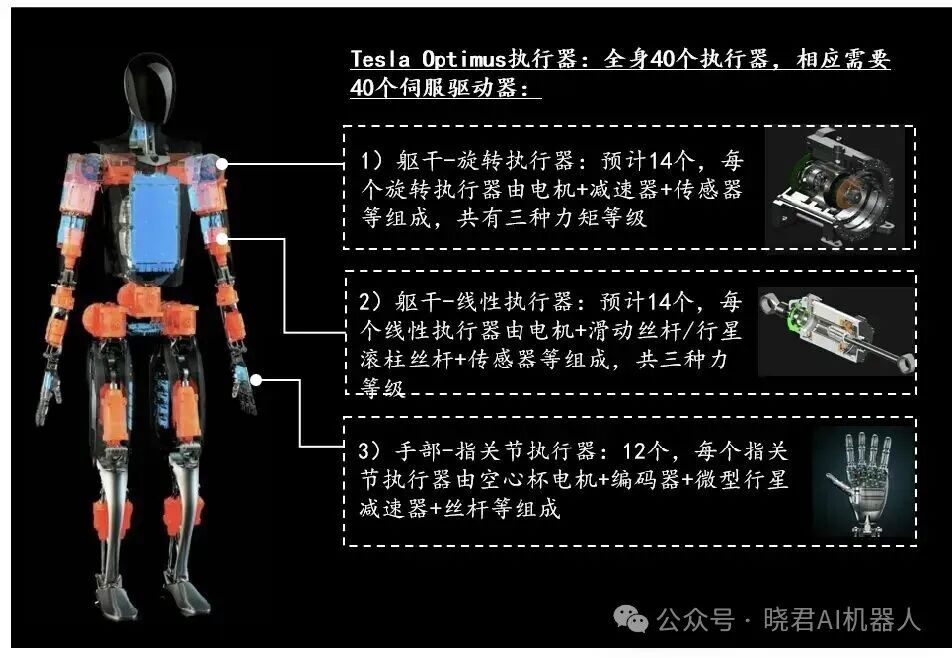
According to information presented at Tesla AI DAY, the Tesla humanoid robot Optimus has a total of 40 joint actuators, all of which are motor-driven, meaning Optimus requires at least 40 servo drives to ensure the robot can flexibly and accurately perform various complex actions.
In terms of driving methods, the logic is primarily based on the main control system → controller → drive → transmission → execution → sensing feedback.
Currently, servo drives also undertake some motion control functions, with a trend towards integrated development of drive and control.
Major domestic servo drive manufacturers include Inovance Technology, Hechuan Technology, Leadshine Technology, Estun, Blue Ocean Huaten, and Mingzhi Electric.
Distribution of Tesla joint actuators:
Bearing
Humanoid robots require a variety of bearings in large quantities.
Bearings are mainly used in the joint connections of rotary joint actuators (including those used in conjunction with reducers, motors, etc.), including angular contact bearings, crossed roller bearings, etc.; harmonic reducers require flexible bearings, needle bearings, etc.
The dexterous hand of the humanoid robot is expected to use 24 sliding bearings, 24 ball bearings, and 36 needle bearings.
Major domestic bearing manufacturers include Wuzhou Xinchun, Changsheng Bearings, Lixing Co., and Guoji Precision.
2. Linear Joints
The linear joints of the Tesla humanoid robot also include the aforementioned rotary components such as actuators, frameless torque motors, and encoders, with the addition of planetary roller lead screws/trapezoidal lead screws, and bearings mainly being deep groove ball bearings and four-point contact bearings.
The total cost of the 14 linear joints accounts for approximately 35.4%.
Lead Screws
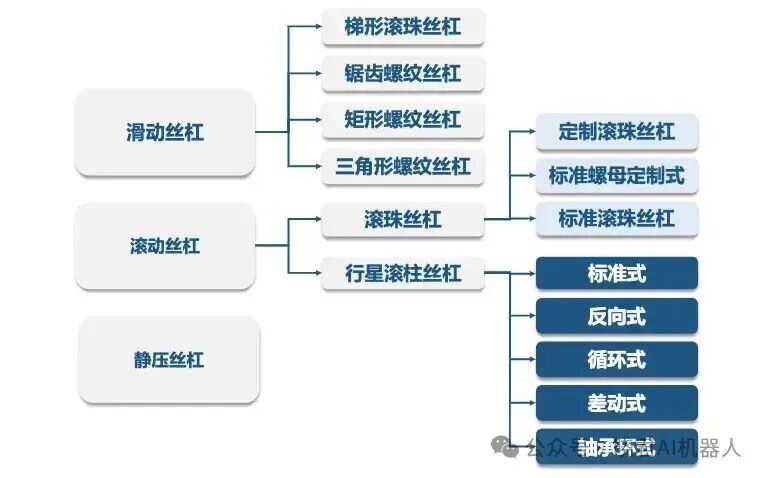
Lead screws are transmission elements that convert rotational motion into linear motion, classified into trapezoidal lead screws, ball lead screws, and planetary roller lead screws based on design structure.
According to relevant information released by Tesla, the Tesla humanoid robot uses a total of 14 planetary roller lead screws for its linear joints.
Planetary roller lead screws are the highest value segment of humanoid robot components, accounting for approximately 28.6% of the cost. For the Tesla Optimus, the unit price of a single planetary roller lead screw is about 1500 yuan, with the total value of planetary roller lead screws in a single humanoid robot exceeding 21,000 yuan.
Planetary roller lead screws are a new type of precision rolling functional component, characterized by small size, high thrust, and high precision, making them the optimal choice for actuators under high load, high speed, and complex working conditions.
Classification of lead screws:
From the perspective of the planetary roller lead screw industry structure, overseas companies have a first-mover advantage, while domestic companies are accelerating the realization of domestic substitution.
Swiss GSA is the world’s largest manufacturer of planetary roller lead screws, holding a market share of 52% in the Chinese market. The Tesla humanoid robot Optimus uses a reverse planetary roller lead screw, specifically the RGTI 12.8 manufactured by Swiss GSA.
According to public information, the main companies currently involved in planetary roller lead screws in China include Beite Technology, Hengli Hydraulic, Best, Shuanglin Co., Wuzhou Xinchun, Hechuan Technology, Shiling Co., Nanjing Technology, Dingzhi Technology, and KGG.
Overall, the domestic planetary roller lead screw industry is in a growth phase, with future breakthroughs in domestic technology expected to lead to a downward substitution logic for ball screws and trapezoidal lead screws.
3. Dexterous Hands
Dexterous hands mainly consist of actuators, hollow cup motors/brushless slot motors, encoders, precision planetary reducers, planetary gearboxes, worm gears, etc., with the total cost of the two hand joints accounting for approximately 5.5%.
The Tesla Optimus dexterous hand:

Source: Tesla AI DAY
Hollow Cup Motors/Brushless Slot Motors
The finger joints of humanoid robot hands require high degrees of freedom and need to be equipped with small-sized but high-power motors, which is where hollow cup motors meet this requirement.
Hollow cup motors, as the core components of the dexterous hand’s end effector in humanoid robots, are currently one of the most optimal motor solutions.
The Tesla Optimus dexterous hand uses six motor drives, requiring 12 hollow cup motors.
The main components of hollow cup motors include hollow cup windings, rotor assemblies, sensor components, flanges, bearings, and magnetic yokes, with core technical barriers including coil design, winding processes, and winding equipment.
Leading international companies mainly use one-time winding forming production technology and possess core technologies such as barrier coil winding design and processing, and barrier winding equipment technology. Their automation level is high, capable of processing coils required for motors with wire diameters of 0.08-0.2mm and power below 400W.
Domestic companies mainly use winding production, relying on manual labor and limited wire diameters, with current one-time forming winding equipment needing breakthroughs.
New entrants have shallow technical accumulation, making it difficult to meet the high efficiency requirements in the humanoid robot field.
Global market structure for hollow cup motors shows that overseas manufacturers have established technological advantages early on.
Germany, Switzerland, the USA, and Japan have leading companies that maintain high market shares, forming a certain degree of monopoly.
Swiss Maxon, German Faulhaber, and Swiss Portescap are in the industry’s top tier and have applied for numerous patents related to hollow cup motors.
Some excellent domestic manufacturers are accelerating their catch-up and layout. For example, products from Mingzhi Electric and Dingzhi Technology have been applied in high-end fields such as military, medical, and semiconductors, and can customize products of different specifications, providing products in the form of “encoder + controller + hollow cup motor + precision gearbox”.
According to public information, Mingzhi Electric has achieved mass production and sales. The company has mastered core technologies through two acquisitions: acquiring Lin Engineering from the USA and Technosoft Motion AG from Switzerland, which has maintained a leading global technology level in hollow cup drive control.
Comparing the same model hollow cup motor products from MAXON and Mingzhi Electric, the gap in core indicators such as no-load speed and maximum continuous torque is continuously narrowing.
Dingzhi Technology’s hollow cup motors are basically mature and are in the stage of small to medium batch supply, with self-developed hollow cup motor winding equipment achieving fully automated mass production. Dingzhi Technology was acquired by Jiangsu Leili in 2019, becoming its holding subsidiary.
Leading industrial control companies like Weichuang Electric have also entered the robotics field, laying out products such as hollow cup motors and frameless motors. Weichuang Electric’s self-developed hollow cup motor can achieve a no-load speed of 85,000 rpm, a maximum output power of 58W, a maximum rated torque of 7Nm, and an efficiency of up to 90%. The hollow cup motor module suitable for dexterous hands of 10mm has already received small batch orders.
Leading micro-drive companies like Zhaowei Electromechanical have formed a series of products for torque DC motors and brushless hollow cup motors, used in humanoid robots and other fields, and are working on 4mm diameter brushless hollow cup motors to break through foreign technical barriers; 8mm permanent magnet stepper motors have achieved automated mass production, and they are actively laying out 3.4mm and 4.4mm products.
Currently, the industrialization process of humanoid robots is accelerating, and the trend of domestic substitution for core components is clear. In the future, as domestic robot hardware iterates and upgrades, cost advantages will gradually become apparent. In the hollow cup motor sector, with continuous breakthroughs in domestic winding machines, domestic companies are accelerating their efforts to overcome barriers in hollow cup motors, which is expected to open up the high-end hollow cup motor market.
As the mass production of Tesla’s humanoid robot approaches, the trend in the humanoid robot industry is strong, and there is expected to be a significant increase in demand for core components, further driving the penetration rate and market share of domestic manufacturers.
This article focuses on three core sensors of humanoid robots: tactile sensors, visual sensors, and force/torque sensors.
01. Force/Torque Sensors
Force/torque sensors can measure the forces and torques acting on the joints or end effectors of the robot in real-time, providing critical feedback information to the control system. This allows the robot to autonomously adjust its posture during operations, ensuring stability and precision.
According to the measurement dimensions, force sensors can be divided into one-dimensional to six-dimensional force sensors.
From the perspective of mainstream sensor measurement dimensions, one-dimensional, three-dimensional, and six-dimensional torque sensors are common products, while two-dimensional and five-dimensional torque sensors are relatively rare.
The more measurement dimensions, the greater the production difficulty of the product.
According to Yuan Ming, CTO of Kunwei Technology: “If the direction of the force is fixed, a one-dimensional force sensor can be used; if the force application point coincides with the sensor’s calibration reference point but the direction of the force varies randomly, a three-dimensional force sensor can be used; if both the direction and application point of the force vary randomly in three-dimensional space, a six-dimensional force sensor should be used for measurement.”
Six-dimensional force sensors are the highest-dimensional tactile sensors, capable of providing the highest dimensional tactile information and the most comprehensive and precise tactile data.
The barriers for six-dimensional torque sensors are also the highest, as the number of strain gauges required is several times that of one-dimensional force sensors, and the production difficulty is high, making their cost far exceed that of one-dimensional torque sensors.
Installing six-dimensional force sensors at the end of humanoid robots can obtain tactile information from the force sensors.
Humanoid robots have a clear demand for force sensors; for example, the Tesla humanoid robot Optimus uses torque sensors and tension sensors at the joints, while the wrist and ankle joints use six-dimensional force sensors, capable of measuring three force components and three torque components in three-dimensional space, providing comprehensive tactile information for the robot.
The Tesla humanoid robot uses six-dimensional force sensors at the wrist and ankle joints:

Source: Tesla official website
UBTECH has equipped its humanoid robots with four six-dimensional force/torque sensors at the wrist and ankle.
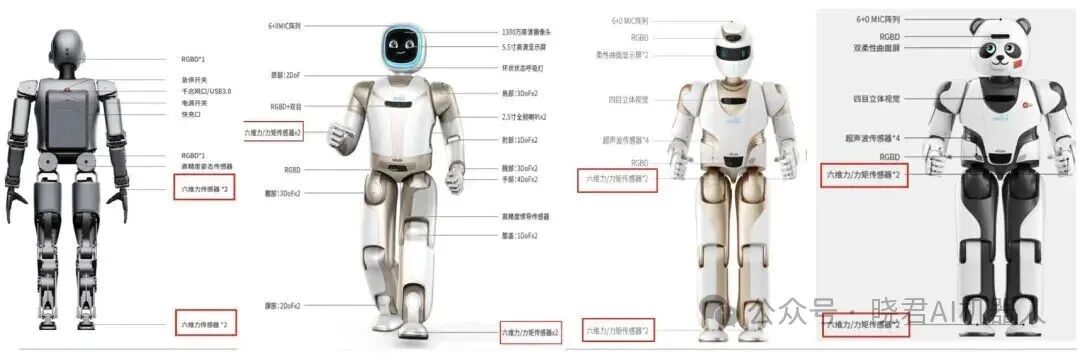
Source: UBTECH official website
Currently, the market for six-dimensional force sensors is relatively small, and no significant scale effect has formed.
There are many established foreign manufacturers in the global market, with European and American countries starting early. The market structure is relatively concentrated, with the top ten manufacturers accounting for about 70% of the market share.
In the global six-dimensional force sensor market, ATI occupies a large market share and is the preferred supplier for many robot and automation equipment manufacturers. ATI was the first to develop six-dimensional force and torque sensors, capable of measuring forces and torques in three directions (XYZ).
Among domestic manufacturers, there are currently few companies capable of mass supply, with Yuli Instruments, Blue Dot Touch, Kunwei Technology, Xinjing Cheng, and Haibosen being major players, with some indicators matching those of overseas products. Companies like Keli Sensor, Donghua Testing, Haoshi Electromechanical, Anpeilong, Shenyuan Intelligent, and Reiter Measurement and Control have accelerated their layout in recent years.
In the 2023 Chinese six-dimensional force sensor market, Yuli Instruments ranked second with a market share of 12.2%. The first place is ATI, with a market share of 22.4%. Yuli Instruments’ six-dimensional force sensors are used in UBTECH’s Walker S1 humanoid robot.
Blue Dot Touch’s six-dimensional force sensor products have entered the supply chains of collaborative robots from Dazhu, Luoshi, Xinsong, and UR.
Kunwei Technology’s six-dimensional force sensors have deep cooperation with collaborative robot manufacturers such as Jieke, Aobo, Ruierman, Yuejiang, and Siling.
Keli Sensor has already supplied samples to many domestic industrial robots, collaborative robots, and humanoid robot customers, and has obtained batch orders from some collaborative robot customers. In addition, Keli Sensor has delivered six-dimensional force sensor samples to Huawei, which have passed customer testing, and the orders have been completed.
Before mass production, body manufacturers will prioritize finding six-dimensional force/torque sensor manufacturers with strong R&D capabilities to support body development.
After product finalization, cost reduction in mass production is key, and companies with large-scale cost reduction capabilities, especially those with automated placement equipment and experience in mass production of force sensors, will have an advantage.
Application locations for humanoid robot sensors:

02. Tactile Sensors
Tactile sensors are important sensors for robots to directly perceive the environment, applied in joints and flexible skin areas of robots.
As an important complement to visual sensing, tactile sensors allow robots to perceive the physical properties of objects, such as shape and texture, through touch, enabling precise grasping operations.
The most valuable sensors in the Tesla humanoid robot’s hand are tactile sensors.
Each finger of the Optimus is equipped with flexible tactile sensors:

Tactile sensors are mainly divided into flexible and rigid (mainly MEMS). Among them, flexible tactile sensors have higher value, with barriers mainly in materials and manufacturing.
Material choices include sensitive materials such as organic polymers, graphene, and flexible substrate materials.
Tactile sensors are currently in the early stages of development, with the current market mainly dominated by overseas companies such as Canatu, Sensel, and Flexpoint.
Domestic companies involved in tactile sensors include Suzhou Nengsida Electronics (Hanwei Technology), Shenhao Technology, Moxian Technology, Ligan Technology, Ruihu Technology, Puhui Technology, Parsini Perception, Taishen Technology, and Yubo Intelligent.
In the future, the demand for more refined tactile perception capabilities in various scenarios will further drive the demand for robot tactile sensors, with humanoid robot limbs, chests, and other areas expected to become potential application scenarios.
03. Visual Sensors
Visual sensors obtain environmental images through cameras for object recognition and tracking.
Depth cameras (such as LiDAR, ToF cameras) can help obtain 3D spatial information, enabling humanoid robots to recognize objects, pedestrians, and obstacles in their surroundings, achieving obstacle avoidance and navigation functions.
LiDAR is used for high-precision distance measurement of the environment, helping robots understand the location and dynamics of surrounding obstacles, providing important information for path planning and obstacle avoidance.
Hesai Technology has launched the mini 3D LiDAR JT series products for the robotics field, using Hesai’s fourth-generation self-developed chip, providing a 360° x 187° ultra-hemispherical field of view, offering zero-blind-spot three-dimensional perception capabilities for robots.
Suoteng Juchuang has launched the world’s first fully solid-state digital LiDAR E1R, equipped with digital SPAD-SoC chips and 2D VCSEL chips, supporting various types of mobile robots to operate in different lighting conditions.
Orbbec’s latest dToF (direct time-of-flight) LiDAR sensor chip LS635 integrates high-performance SPAD pixels and high-performance data processing modules, using the industry’s most advanced 3D stacking process of back-illuminated SPAD-SoC chips, and has been applied in scenarios such as robots, drones, and autonomous driving.
Machine vision is one of the most important frontier technologies in artificial intelligence, with the underlying logic being to implant “human eyes and brains” into machines, allowing machines to replace humans in measuring and judging detected objects.
Currently, machine vision is evolving into robot vision, with humanoid robot vision solutions mainly based on combinations of structured light, binocular or multi-eye RGB, and ToF.
UBTECH’s humanoid vision solution:

Global machine vision market is dominated by manufacturers such as Cognex from the USA and Keyence from Japan, which together account for over 50% of the global market share.
In the domestic machine vision industry, local manufacturers such as Hikvision, Daheng Technology, Tianzhun Technology, and Lingyun Optical have made significant investments in core component technologies and independent software algorithms; Orbbec holds over 70% market share in the 3D vision sensor field for service robots in China; Aopu has a complete range of core machine vision hardware and software products.
Additionally, IMUs can measure the angular velocity and acceleration of humanoid robots in real-time in three-dimensional space, providing real-time feedback to the control system by sensing the robot’s body tilt, rotation, and other posture changes, allowing it to quickly adjust the robot’s gait and posture to maintain balance and prevent falls. Major players in this field include Minxin Co. and Xindong Lian Technology.
As the mass production of Tesla’s humanoid robot accelerates, the trend in the humanoid robot industry is strong, and there is expected to be a significant increase in demand for core components, further driving the penetration rate and market share of domestic manufacturers.
Source: Network, if there is any infringement, please contact for deletion!