This article is from the Automotive Electronics Network


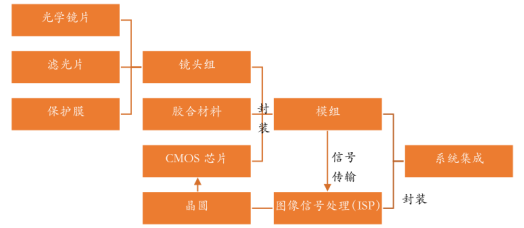 Fig. 3 Image Signal Processor (ISP)
Fig. 3 Image Signal Processor (ISP)



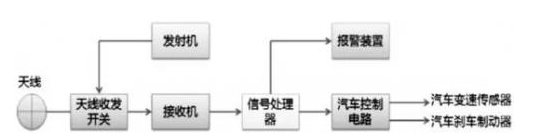



 Fig. 21 V2X (Vehicle-to-Everything) Communication Modes
Fig. 21 V2X (Vehicle-to-Everything) Communication Modes












This article is from the Automotive Electronics Network
Fig. 3 Image Signal Processor (ISP) Fig. 21 V2X (Vehicle-to-Everything) Communication Modes