1. Install Necessary Packages:
sudo apt-get updatesudo apt-get install python3-smbus python3-dev i2c-toolssudo apt-get install python3-smbus2. Confirm I2C Interface is Enabled:
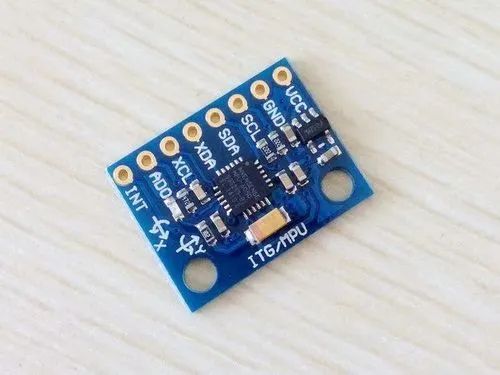
sudo raspi-config command to open the Raspberry Pi configuration tool.3. Confirm Sensor Connections:
4. Navigate to the Directory to Store Code
cd /home/pi/my_code_directory5. Create a New .py File
nano mpu6050_qt.py6. Enter the Code
import sys
from PyQt5.QtWidgets import QApplication, QMainWindow, QVBoxLayout, QWidget, QPushButton, QLabel, QMessageBox
from PyQt5.QtCore import QTimer
import RPi.GPIO as GPIO
import smbus
class DataCollectionApp(QMainWindow):
def __init__(self):
super().__init__()
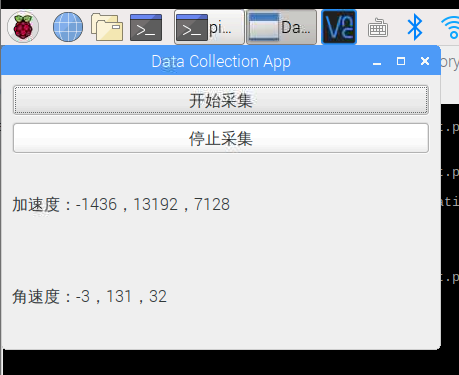
self.setWindowTitle("Data Collection App")
# Create buttons and labels
self.start_button = QPushButton("Start Collection")
self.stop_button = QPushButton("Stop Collection")
self.accel_label = QLabel("Waiting for data collection...")
self.gyro_label = QLabel("Waiting for data collection...")
# Set layout
layout = QVBoxLayout()
layout.addWidget(self.start_button)
layout.addWidget(self.stop_button)
layout.addWidget(self.accel_label)
layout.addWidget(self.gyro_label)
central_widget = QWidget()
central_widget.setLayout(layout)
self.setCentralWidget(central_widget)
# Connect signals and slots
self.start_button.clicked.connect(self.start_collection)
self.stop_button.clicked.connect(self.stop_collection)
# Initialize state
self.is_collecting = False
self.timer = QTimer()
self.timer.timeout.connect(self.update_data)
def start_collection(self):
if not self.is_collecting:
self.is_collecting = True
self.timer.start(2000) # Update data every 2 seconds
else:
QMessageBox.warning(self, "Warning", "Collection already started!")
def stop_collection(self):
if self.is_collecting:
self.is_collecting = False
self.timer.stop()
else:
QMessageBox.warning(self, "Warning", "Collection has not started yet!")
def read_data(self):
bus = smbus.SMBus(1)
device_address = 0x68 # MPU6050 device address
# Start accelerometer and gyroscope
bus.write_byte_data(device_address, 0x6B, 0x00)
bus.write_byte_data(device_address, 0x1B, 0x08)
# Read acceleration values
accel_x = self.read_word_2c(bus, device_address, 0x3B)
accel_y = self.read_word_2c(bus, device_address, 0x3D)
accel_z = self.read_word_2c(bus, device_address, 0x3F)
# Read gyroscope values
gyro_x = self.read_word_2c(bus, device_address, 0x43)
gyro_y = self.read_word_2c(bus, device_address, 0x45)
gyro_z = self.read_word_2c(bus, device_address, 0x47)
return (accel_x, accel_y, accel_z), (gyro_x, gyro_y, gyro_z)
def read_word_2c(self, bus, address, register):
high = bus.read_byte_data(address, register)
low = bus.read_byte_data(address, register + 1)
value = (high << 8) + low
if value >= 0x8000:
return -((65535 - value) + 1)
else:
return value
def update_data(self):
acceleration, gyro = self.read_data()
accel_data = "Acceleration: {}, {}, {}".format(acceleration[0], acceleration[1], acceleration[2])
gyro_data = "Gyroscope: {}, {}, {}".format(gyro[0], gyro[1], gyro[2])
self.accel_label.setText(accel_data)
self.gyro_label.setText(gyro_data)
if __name__ == "__main__":
app = QApplication(sys.argv)
window = DataCollectionApp()
window.show()
sys.exit(app.exec_())
7. Execute the Code
python3 mpu6050_qt.pyPlease note: Execute under VNC login, otherwise the interface cannot pop up.
Related Past Articles:
Raspberry Pi | I2C Communication
Raspberry Pi | Angular Velocity and Acceleration Sensor

Want to know more?
Quickly scan the code to follow!