> The steps include: initializing the positions of the radar and UAV, generating the signal model, processing the received signals to estimate angles, and then calculating the position using TDOA/AOA fusion algorithms. The code structure may be divided into parameter settings, signal generation, signal processing, positioning algorithms, and result visualization.
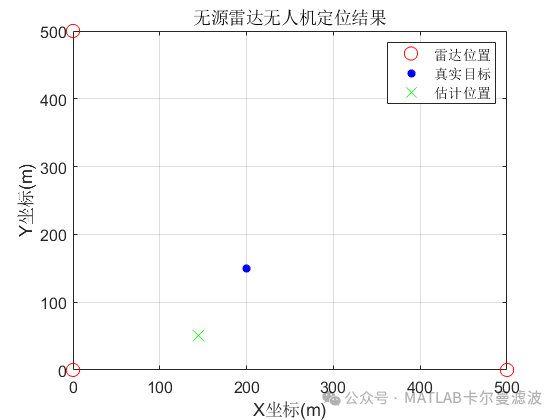
Running Results
# Source Code
%% Passive Radar UAV Positioning% Author: matlabfilter% 2025-03-08/Ver1clear; clc; close all;% Parameter settingsc = 3e8; % Speed of lightfc = 2.4e9; % Carrier frequencyfs = 10e6; % Sampling rateSNR = 50; % Signal-to-noise ratio (dB)N = 8; % Number of receiving array antennaslambda = c/fc; % Wavelengthd = lambda/2; % Element spacing% Initialize UAV and radar positions (example coordinates)radarPos = [0, 0; 500, 0; 0, 500]; % Three passive radar positions (2D)targetPos = [200, 150]; % True target positiontargetVel = [30, 20]; % Target velocity (m/s)% Generate signal model (based on opportunistic illumination sources)[signals, tdoa, fdoa] = generateSignal(radarPos, targetPos, targetVel, fc, fs, c, SNR);% Signal processing: angle estimation (MVDR algorithm)theta_est = zeros(size(radarPos,1),1);for i = 1:size(radarPos,1) R = signals{i} * signals{i}' / size(signals{i},2); % Covariance matrix theta_grid = 0:0.1:180; % Angle search range P_mvdr = mvdr_spectrum(R, d, lambda, theta_grid); [~, idx] = max(P_mvdr); theta_est(i) = theta_grid(idx); % Estimated arrival angleendComplete code:https://mbd.pub/o/bread/aJWakpxy
Code Explanation
Signal Generation Module:
* Simulates UAV reflected signal generation, considering TDOA (Time Difference of Arrival) and FDOA (Frequency Difference of Arrival) effects
* Adds Gaussian white noise to simulate real-world environments
Angle Estimation Module:
* Uses the MVDR (Minimum Variance Distortionless Response) beamforming algorithm for DOA estimation
* Achieves high-resolution angle measurement through covariance matrix calculations
Positioning Calculation Module:
* Constructs an overdetermined equation system using combined TDOA and AOA measurements
* Uses Weighted Least Squares (WLS) for position calculation
Visualization Module:
* Displays the geometric relationship between radar positions, true target, and estimated positions
* Positioning accuracy can be analyzed through error ellipses
Suggestions for Extension and Improvement:
* Multipath processing
* Add adaptive filtering modules (e.g., LMS algorithm) to suppress multipath interference
If you need assistance or have custom code requirements related to navigation and positioning filtering, please contact via WeChat below:
