Follow our public account to not miss any messages!

This tutorial was originally published by the author strongerHuang in September 2018.
Tags: CAN, CANOpen, CanFestival
Copyright: Commercial use prohibited
Disclaimer:This document is for personal learning use only. Please contact the author for authorization if you wish to reproduce it.
1Introduction
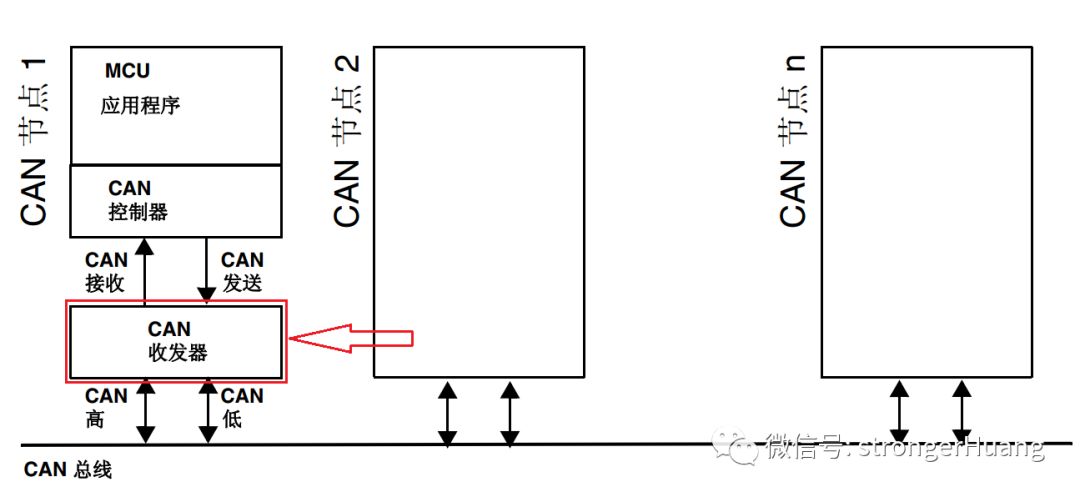
The previous article provided a broad overview of the CAN network to give readers a basic understanding. This article narrows the focus to discuss one component of the entire CAN network: the CAN transceiver, as marked in the figure below:
This article addresses common questions that beginners may have regarding the CAN transceiver, covering the following points:
-
What is a CAN transceiver?
-
CAN Bus Differential Signals
-
Differences Between CAN Transceiver Chips and 485 Chips
2
What is a CAN Transceiver?
The position of the CAN transceiver in the entire CAN network is shown in the above figure. A CAN transceiver is similar to a 232 or 485 conversion chip, and its main function is to convert the TTL signals from the CAN controller into differential signals for the CAN bus.
2.1 What are CAN Controller TTL Signals?
Currently, CAN controllers are generally integrated with the MCU, and the TTL signals sent and received are the MCU pins (high or low) signals.
Previously, there were standalone CAN controllers, and a CAN network node would consist of three chips: MCU chip, CAN controller, and CAN transceiver. Now, the first two are integrated together (as shown in the opening image of the article).
3
CAN Bus Differential Signals
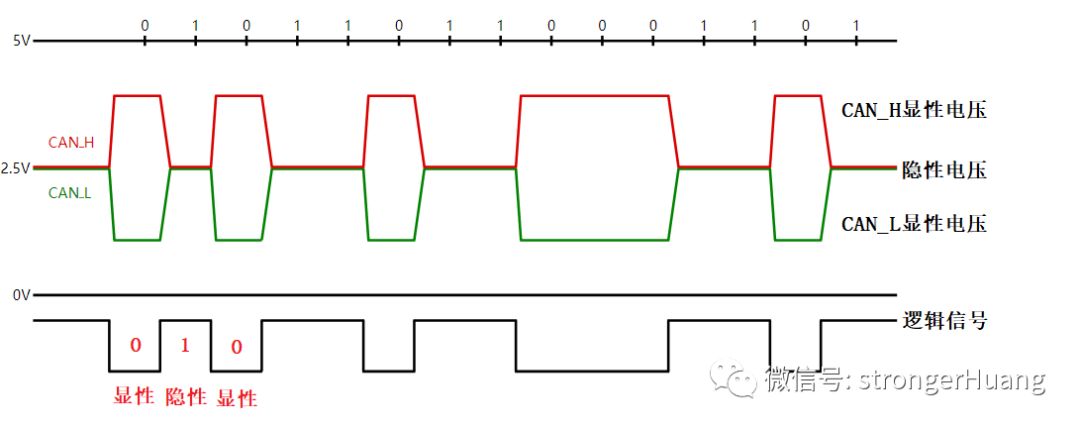
CAN bus signals coming from the CAN transceiver are “two-wire” “differential” signals, where the recessive state represents logic 1 and the dominant state represents logic 0.
1. CAN Transceiver Two Wires
Chip pins CAN_H, CAN_L
2. CAN_H and CAN_L Voltage
The voltage levels depend on the chip model; common CAN transceiver chips are available in 3.3V and 5V variants.
As shown in the above figure, for a 5V CAN transceiver, the voltage levels during logic 0 and logic 1 are as follows:
Logic 0:
Dominant, CAN_H=3.5V, CAN_L=1.5V;
Logic 1:
Recessive, CAN_H=2.5V, CAN_L=2.5V;
Of course, the bus voltage principles for 3.3V voltage chips are similar. In practical applications, the bus voltage may not strictly adhere to the aforementioned 3.5V, 2.5V, 1.5V due to factors like wire resistance and external interference.
3. Dominant and Recessive
As learned in biology, genes can be dominant or recessive. A recessive gene exists but does not manifest itself, while a dominant gene does.
The principle of dominant and recessive signals in the CAN bus is similar: when both types of signals are present on the bus, the bus will exhibit the dominant signal.
Note:The dominant and recessive signals mentioned here refer to the bit-level signals transmitted on the bus.
Thus, the CAN bus typically remains in a recessive state when idle. If a signal intended to be recessive is sent, the bus will only exhibit this recessive state if no other node sends a dominant signal; otherwise, if any other node sends a dominant signal, the recessive signal sent by your node will be invalid.
4. CAN Transceiver R Pin
The R pin of the CAN transceiver is connected to the CAN controller for receiving signals. As shown in the figure below:
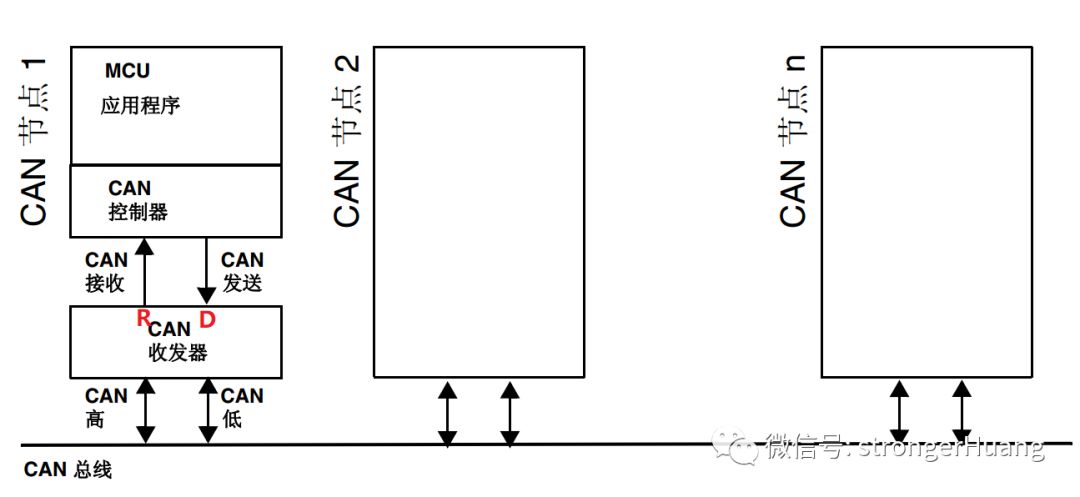
The R pin signals represent the current signals on the bus, allowing the controller to monitor the bus signals in real-time. There are two main purposes:
A. Monitor signals sent by other nodes: Data sent by others;
B. Monitor signals sent by its own node: To check if its own transmission has failed. As mentioned above, if it sends a recessive signal but detects a dominant signal, it indicates that someone else is sending data.
4
Differences Between CAN Transceiver Chips and 485 Chips
Both CAN communication and 485 communication are half-duplex. However, why does the CAN bus have evident advantages in speed and stability compared to 485 communication?
4.1 Bus Utilization
The working principle of CAN transceivers differs significantly from that of 485. As seen from the differential signals above, when both types of chips are present, only the dominant signal is effective, which does not affect bus transmission. In simple terms, the CAN bus has an automatic arbitration function, which improves bus utilization.
The RS485 bus is a conventional communication bus that cannot perform automatic arbitration, meaning it cannot send data simultaneously to avoid bus contention. Therefore, the communication efficiency of the entire system is inevitably lower, leading to higher data redundancy, making RS485 unsuitable for applications requiring high speed.
Note:
Any recessive signals not sent out will be subsequently sent by the CAN controller. This involves priority issues on the CAN bus, which will be discussed further.
Of course, CAN has significant advantages over 485, primarily due to the CAN controller.
4.2 Can a CAN Transceiver be Omitted?
UART can directly connect the TX pin to the RX pin of the other side, using TTL signals for communication. Can the same be done with CAN?
The answer is: unidirectional transmission is possible, but bidirectional transmission is not.
The reason is simple: as mentioned earlier, the CAN controller continuously monitors whether the signals sent out are correct. In other words, the TX signal must match the RX signal; otherwise, the CAN controller will consider the transmission a failure.
5
Notes
1. Some text in this document comes from the internet and is for personal learning use only. Copyright reserved, commercial use prohibited.
2. This article was edited and compiled by me alone, so there may be some errors.
3. This article is included in the public account “strongerHuang”; follow the public account and reply with [CANOpen Series Tutorial] to view the entire series.
6Conclusion
If you find this article helpful, please remember to like and share it. (Likes are the motivation for the author to update articles)
Scan the QR code below to follow and explore more exciting content in the bottom menu!

Long press to recognize the QR code in the image to follow

Appreciation is a recognition and support for the author!