Would you like to assemble a mini drone that can fly stably and be controlled by a smartphone using an ESP32 development board and a few expansion modules? Recently, Espressif has brought an exciting project called esp-drone! This is an open-source drone firmware based on ESP32/ESP32-S2/ESP32-S3.

Ultra-Simplified Hardware Composition
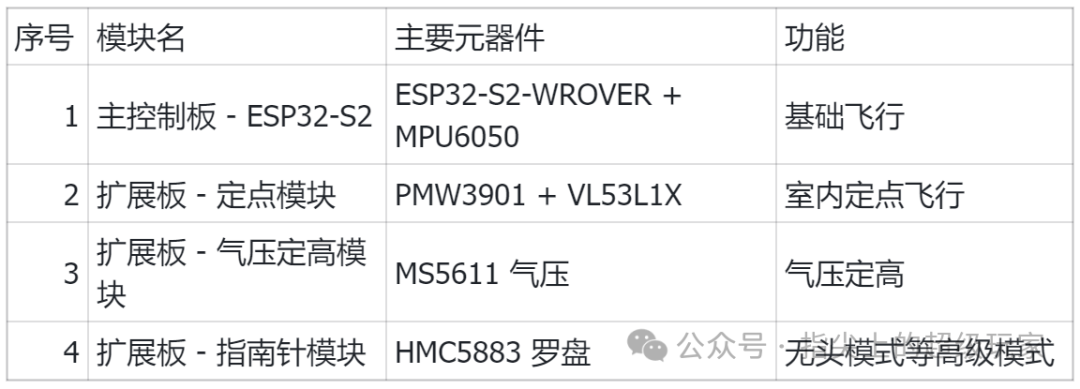
ESP-Drone uses a modular design approach, consisting of a main control board and an expansion board, with a cost of approximately 150 Yuan, where the electronic speed controller (ESC) accounts for a significant portion of the cost.
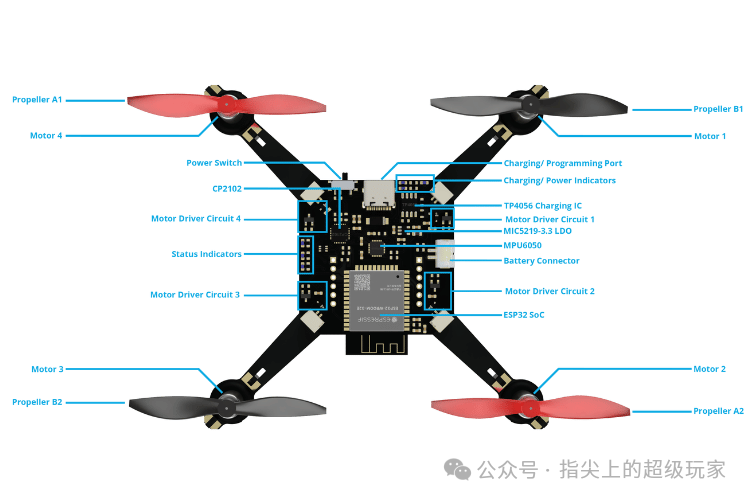
Main Control Board: Equipped with an ESP32-S2 module and necessary sensors for basic flight, providing hardware expansion interfaces.
Expansion Board: Equipped with additional sensors, can connect to the main control board’s hardware expansion interfaces, supporting advanced flight functions.
Comparison with Traditional Solutions
Core Advantage: Using Espressif’s mature ESP32 chip and open-source ecosystem,
turning “building a drone” from a “professional barrier” into a “DIY project that everyone can try.”


Hardware + Software
Hardware:
The hardware solution of esp-drone is very flexible, with the basic version requiring only an ESP32 development board and motors/ESC.
IMU Sensor: Measures acceleration/gyroscope (for stable flight)
Barometer: Measures altitude (for altitude hold mode)
Optical Flow Sensor: Position hold (hovering at a fixed coordinate)

Software:
The esp-drone software is based on Espressif’s official ESP-IDF framework (recommended version 5.0), with a clear code structure that includes:
Flight Control Core: Ported from the classic open-source drone project Crazyflie, supporting algorithms for stabilize mode, altitude hold, etc.;
Communication Protocol: Supports Wi-Fi direct connection to a mobile app or communication with game controllers via ESP-NOW;
Mobile App: Open-source for both iOS/Android platforms, can control flight and view sensor data (search GitHub for `ESP-Drone-iOS`/`ESP-Drone-Android`).
Flight Control Function Testing
Function 1: Stabilize Mode
This is the basic mode, where the flight control adjusts the motor speed based on IMU data to maintain the drone’s balance. Testing results:
– Gently push the throttle (up on the app’s virtual joystick), the drone will ascend steadily;
– Tilt the joystick left/right or forward/backward, the drone will slowly turn or translate;
– Release the joystick, the drone will automatically adjust to a level state (will not “crash”).
Function 2: Height-hold Mode
Requires a barometer! Once activated, the flight control will lock the current height based on pressure data. Testing results:
– After ascending to 1 meter and releasing the throttle, the drone hovers (height fluctuation <10cm);
– Manually pushing down on the drone (simulating external force), the flight control will automatically accelerate the motors to restore the original height.
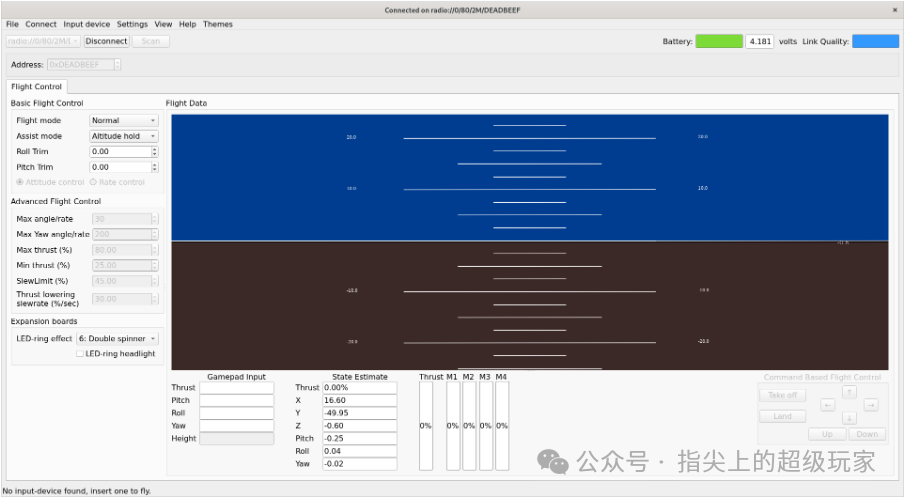
Function 3: Mobile App Control
The app interface includes:
Virtual joystick: Controls flight direction and throttle;
Data panel: Displays height, angular velocity, and battery level in real-time;
Mode switching: Stabilize mode → Height hold → Position hold (requires optical flow/GPS).
These Scenarios Are Not Suitable
Professional aerial photography: The ESP32’s computing power is limited, unable to support 4K video transmission or complex obstacle avoidance;
Long flight time requirements: A 300mAh battery can only fly for 3-5 minutes (requires a larger battery, but will increase weight);
Harsh environments: No waterproof/dustproof design, not suitable for outdoor heavy rain/dusty conditions.
How to Obtain
Source code and documentation
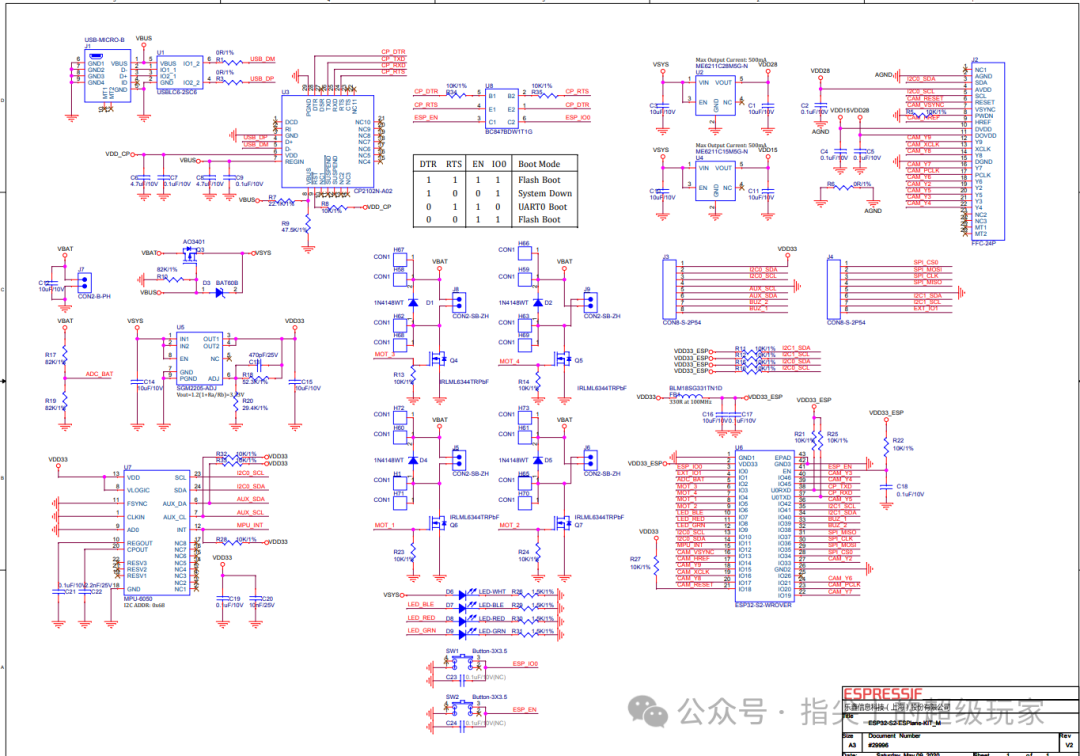
GitHub repository: espressif/esp-drone (includes flight control code);
https://github.com/espressif/esp-droneHardware schematic: Located in the `hardware` folder of the repository (includes expansion board design).
Final Words
The significance of esp-drone lies not only in “building a drone with ESP32” but also in moving “flight control development” from the “laboratory” to the “desktop”—with a development board, a few sensors, and a few lines of code, you can personally touch the core principles of drones.
Click the blue text
Follow us
▼▼▼
This tutorial ends here. If it was useful to you, please give it a thumbs up.
For more information on Home Assistant low-cost modifications, hardware DIY and software tutorials, feel free to follow our public account.
Previous highlights: Your Wi-Fi channels are all occupied!! Build a low-cost Wi-Fi sniffer with ESP32, a hacker-level network monitoring tool!
Build a low-cost smart security camera with ESP32-CAM
Transform a 45 Yuan bathroom heater controller! Remote control in the scorching summer! Start from scratch to integrate the heater into Home Assistant using ESP modules.
Tired of the ordinary Home Assistant interface? A beginner gives Home Assistant an iOS advanced interface!