Click the blue text
Follow us
Hey! Have you ever seen a robot that can run around and pick up trash by itself? Not a remote-controlled toy car, but a smart sorting expert that can distinguish between batteries, plastic bottles, and fruit peels!
Do you remember the “campus internet celebrity” that was trending a few days ago for its agile trash collection in the lab? That’s right! It’s the black technology from Nanjing Industrial Vocational Technical University that won the Gold Medal at the International Women Inventors Award in South Korea! It not only uses a camera to accurately identify trash but also employs a six-axis robotic arm for stable grabbing, and it can even be remotely controlled via a mobile app—this is actually an experimental project from the elective course “Intelligent Perception Technology and Applications of Robots”?!
The best part is, when the robot picks up trash, it will voice report: “Ding~ Detected harmful waste, has been placed in the red trash bin” (imagine the robot’s cute voice).
Let me tell you a secret, this project also won the First Prize at the Jiangsu Province College Student Robot Competition, and it has now become the most sought-after “training artifact” in the lab. Next time you pass by the lab, you might just see its impressive figure accurately targeting rubber scraps!

01
Introduction

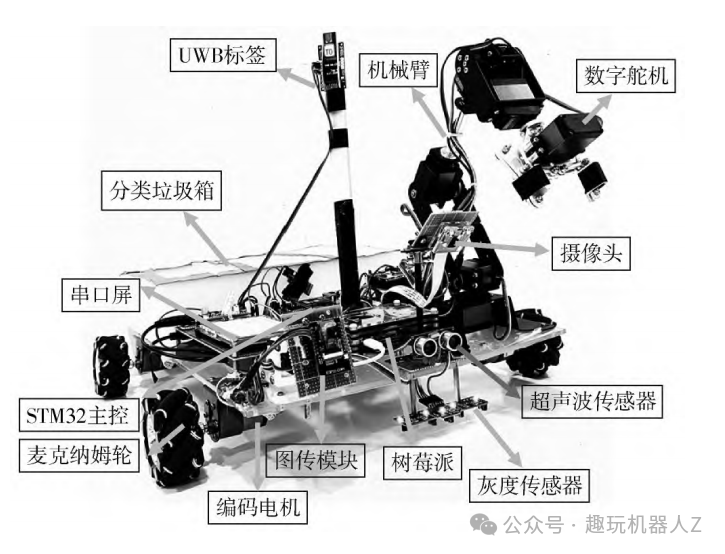
Physical robot experimental system
🔍 Project Background
Traditional embedded system course experiments have long faced three major pain points:
1️⃣ Single content: Experimental projects have remained unchanged for years, lacking innovation.
2️⃣ Insufficient appeal: Difficult to stimulate students’ interest and exploratory desire.
3️⃣ Detached from reality: Unable to reflect the latest developments in embedded technology.
With the widespread application of robots in service, medical, and educational fields, combined with environmental protection issues, the team decided to develop a garbage sorting robot that integrates machine vision, autonomous navigation, and intelligent control.
🚀 Technical Breakthrough
This robot experimental system deeply integrates:
· Machine vision technology: Allows the robot to “see” the trash.
· Precision positioning system: Enables centimeter-level free movement indoors.
· Automatic control algorithms: Achieves precise grabbing and placement.
· Wireless communication module: Supports remote control via mobile phone.
🎯 Teaching Achievements
This system has been successfully applied in the public elective course “Intelligent Perception Technology and Applications of Robots.” Surprisingly, what started as a course experiment ultimately won the Gold Medal at the International Women Inventors Award in South Korea and the First Prize at the Jiangsu Province College Student Robot Competition!
💡 Innovative Value
This robot not only addresses the pain points of garbage classification but more importantly:
· Breaks the dull mode of traditional experimental classes.
· Integrates knowledge points from multiple courses.
· Stimulates students’ innovative enthusiasm.
· Cultivates engineering practical abilities.
Now, this project, which was once just a classroom assignment, has become the most sought-after “training artifact” in the lab, showcasing the infinite possibilities of “small classrooms nurturing big innovations”!

02
Methodology

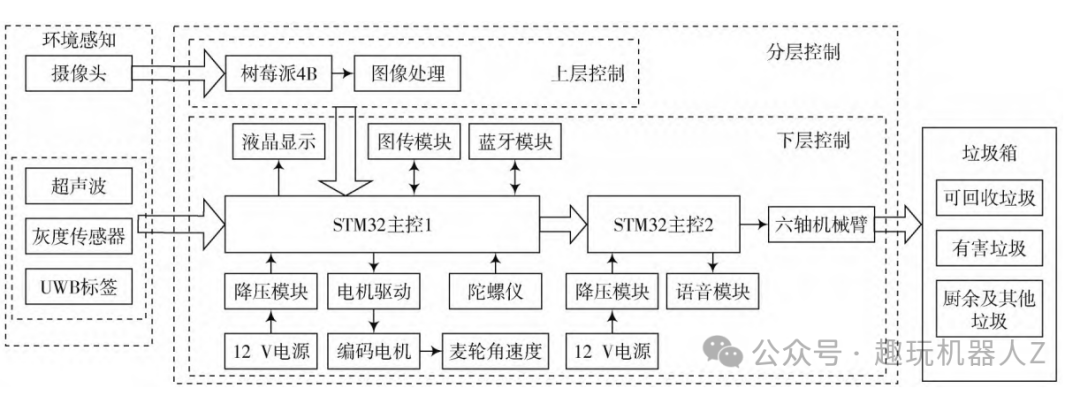
System hardware structure block diagram
🤖 System Architecture Design
· Layered control strategy: The upper layer uses Raspberry Pi 4B for garbage recognition decision-making, while the lower layer employs dual STM32 microcontrollers to control robot movement and robotic arm operation.
· Modular hardware layout: Control core, sensors, and actuators are arranged in layers to ensure stable system operation.
👁️ Core Technology of Visual Recognition
· Algorithm selection: Uses YOLOv5s object detection algorithm, balancing small model size and fast inference advantages.
· Training process: Self-made dataset of 5000 garbage images → Label-me annotation → COCO format conversion → GPU model training → Raspberry Pi deployment.
· Performance: Garbage recognition accuracy exceeds 90%, inference speed is 18-19 frames per second.
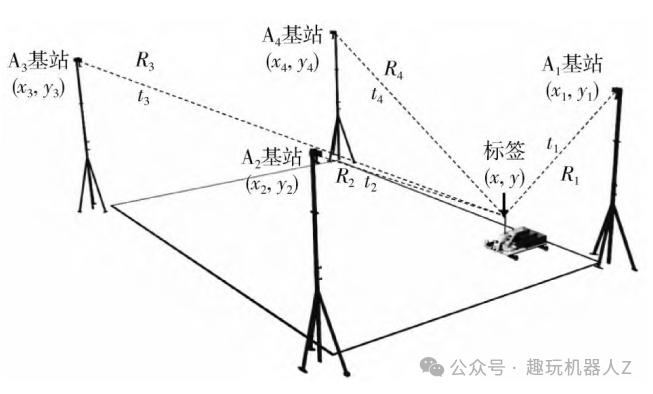
UWB Indoor positioning diagram
📍 Precision positioning technology
· UWB four-base station positioning: Uses TDOA positioning method to achieve centimeter-level positioning accuracy within a 400cm×400cm area.
· Auxiliary positioning: Five grayscale sensors for boundary detection, and a gyroscope for posture awareness.
🚗 Motion Control System
· Omnidirectional movement: Four mecanum wheels combined with encoder motors enable lateral movement, diagonal walking, and spinning in place.
· Control algorithm: Incremental PID algorithm ensures motion stability.
🦾 Intelligent Grabbing Process
1. The camera captures images in real-time and calculates the position of the trash.
2. The Raspberry Pi sends coordinate, angle, and distance information to the STM32.
3. The PID algorithm controls the robot to adjust its posture to the grabbing position.
4. The six-axis robotic arm performs precise grabbing and classification.
📱 Human-Machine Interaction Design
· Bluetooth APP control: Developed based on APP Inventor, featuring three main functions: motion control, grabbing operation, and classification display.
· Remote monitoring: ESP32CAM video transmission module enables real-time status monitoring on the host computer.
🎯 Performance Highlights
· Plane positioning accuracy < 10cm.
· Can accurately identify four types of trash: batteries, medicines, fruit peels, plastics.
· Supports both autonomous patrolling and remote control modes.
The success of this system lies in its deep integration of machine vision, navigation positioning, automatic control, and wireless communication technologies, not only solving the problem of single traditional embedded course experiments but also providing students with a complete technical stack experience from theory to practice. The system is now open-source, becoming a high-quality training platform for cultivating students’ innovative abilities!

03
Research Results

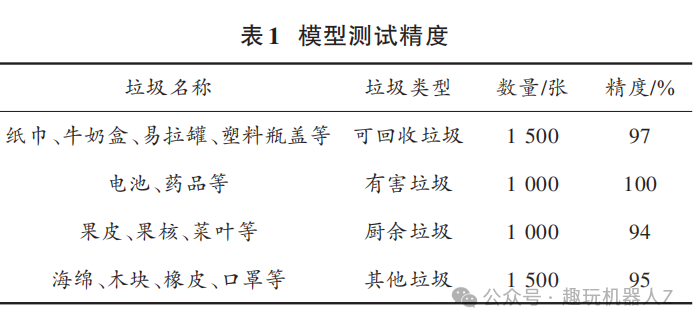
International Gold Medal Robot test results announced: Garbage recognition accuracy exceeds 90%!
🔬 Core Performance Indicators
1. Target detection accuracy breakthrough
Using YOLOv5s algorithm to identify four types of trash.
· Recyclable waste (tissues, milk cartons, cans, etc.): 1500 test samples, accuracy of 97%.
· Hazardous waste (batteries, medicines, etc.): 1000 test samples, accuracy of 100%.
· Kitchen waste (fruit peels, cores, etc.): 1000 test samples, accuracy of 94%.
· Other waste (sponges, wood blocks, etc.): 1500 test samples, accuracy of 95%.
2. Positioning system performance
· Achieves autonomous patrolling within a 400cm×400cm area.
· Plane positioning accuracy < 10cm.
· Uses four-base station UWB positioning technology, with strong anti-interference capability.
3. Real-time processing capability
· Model inference speed: 18-19 frames per second.
· Optimized computational load through model pruning and lightweight techniques.
🎯 Functionality Testing Demonstration
· Robotic arm grabbing success rate of 100%.
· The robot can accurately identify the location of trash and automatically adjust its posture.
· The six-axis robotic arm completes precise grabbing and classification.
· Accompanied by a voice reporting system that provides real-time feedback on disposal results.
· Bluetooth remote control with responsive performance.
· Mobile control interface developed based on APP Inventor.
· Implements three main functions: motion control, grabbing operation, and classification display.
· Real-time updates on the number of trash items in the bin.
💡 Technical Highlights Validation
This system successfully validated multiple technological innovations:
· Multi-sensor information fusion: Camera, UWB, and grayscale sensors work in coordination.
· Omnidirectional movement control: Mecanum wheels enable lateral movement, diagonal walking, and spinning in place.
· Layered control strategy: Raspberry Pi + dual STM32 architecture is stable and reliable.
The test results fully demonstrate that this robot experimental system not only performs excellently in teaching demonstrations but also meets industrial application standards in actual garbage sorting tasks, providing a feasible technical solution for intelligent garbage classification. The system is currently used as a training platform for the course “Intelligent Perception Technology and Applications of Robots,” continuously cultivating students’ innovative practical abilities.

Q&A

Q1: How does this robot recognize different types of trash?
A1: It mainly relies on three key components:
· Camera eyes: Uses an OV5640 camera to continuously capture the surrounding environment.
· AI brain: Employs the YOLOv5s intelligent recognition algorithm, capable of quickly determining the type of trash.
· Rich experience: Trained with 5000 images of trash, improving accuracy like a student practicing exercises.
The actual measured recognition accuracy is as follows:
• 🔋 Hazardous waste (batteries, medicines): 100% accuracy.
• 📄 Recyclable waste (tissues, plastic bottles): 97% accuracy.
• 🍊 Kitchen waste (fruit peels, vegetable leaves): 94% accuracy.
• 🧽 Other waste (sponges, masks): 95% accuracy.
Q2: How effective is this robot system in teaching?
A2: The results exceeded expectations, and it has become the school’s “star project”:
✅ Officially launched: As a practical platform for the public elective course “Intelligent Perception Technology and Applications of Robots.”
✅ Stimulates student interest: Addresses the dull and monotonous issues of traditional experimental classes.
✅ Won two awards:
·🥇 Gold Medal at the International Women Inventors Award in South Korea.
·🏆 First Prize at the Jiangsu Province College Student Robot Competition (Champion).
✅ Comprehensive functionality: Can autonomously patrol and pick up trash, as well as be remotely controlled via a mobile app.
✅ Continuous improvement: The system is fully open-source and will continue to be optimized and improved.
The biggest feature of this system is that it integrates seemingly advanced technologies like camera recognition, autonomous navigation, and robotic arm control into an experimental course that college students can operate themselves.

TIPS

📌 Tip 1: How to improve visual recognition accuracy?
· Capture over 5000 images of trash from multiple angles.
· Use Label-me software to carefully frame and label the trash.
· Finally, deploy the optimized YOLOv5s model on the Raspberry Pi.
· This way, the recognition accuracy can exceed 90%, with hazardous waste (batteries, medicines) achieving 100% accuracy.
📌 Tip 2: How to make the robot’s grabbing more stable?
· Use the incremental PID algorithm for motion control.
· Perform posture fine-tuning before the robotic arm grabs.
· UWB positioning + grayscale sensors assist in precise positioning, with an error of < 10cm.
💡 Extended optimization suggestions:
· Try enabling the robot’s voice reporting function, which can provide real-time feedback on disposal results.
· You can remotely control the robot via a mobile app to grab at a specified location.
· The system is open-source, allowing for continued algorithm improvements and feature expansions.
Interaction time: When do you hope that the garbage classification station in your community can also have such an intelligent manager? We look forward to your comments~
DOI number: 10.16652/j.issn.1004⁃373x.2025.15.026

Thank you for reading
#GarbageClassification #Robot #MachineVision #EmbeddedExperimentalSystemFrom “Symbolic Thinking” to AI Large Models: The Past and Present of Traditional Chinese Medicine DigitalizationCan knead dough and solve Rubik’s cubes? The Michigan team’s new work Hydrosoft: When tactile sensors meet non-Newtonian fluid mechanicsCan robots “mirror” to learn skills? CMU scientists enable AI to switch seamlessly between simulation and reality